1.本发明涉及对汽轮机内缸/隔套板安装的叶片的叶顶进行热喷涂时的路径规划方法,属于汽轮机领域。
背景技术:
2.随着热喷涂行业的大力发展,热喷涂作为表面强化技术的一种,被广泛应用于航空、航天、机械工业等领域。汽轮机内缸/隔板套等零件常常通过热喷涂封严涂层的技术减少漏气、提高效率。但是由于内缸/隔板套等零部件体积较大,制造时分成上、下两个半圆结构,在其内部安装多个叶片,叶片的叶顶形成的半圆采用热喷涂工艺进行封严,在喷涂时往往需要通过喷枪的圆弧运动,分别对零件上、下半进行喷涂。由于零件尺寸大,安装叶片级数多,各级叶片内径尺寸也不相同,只在初始时示教几个点难以准确编制整个零件的喷涂路径程序。如果对所有级都进行手动示教再喷涂,每一级需要取3个示教点画弧线,对于20级以上的高压内缸,不但编程工作量非常大,而且操作难度大,当工作人员对处于下层级数进行示教时由于高度适合容易完成,而对上层级数进行示教时,由于高度超出身高太多,需借助工具才能够到上层级数相应的示教点以完成示教,因此,对操作人员而言,这种喷涂的路径规划太复杂,操作难度大。因此,亟需一种简单的编程方法,对级数多的汽轮机内缸/隔板套等零件进行喷涂路径进行规划。
技术实现要素:
3.本发明目的是为了解决现有汽轮机热喷涂路径编程复杂、操作难度大的问题,提供了一种汽轮机热喷涂路径规划方法。
4.本发明所述一种汽轮机热喷涂路径规划方法,该方法用于对汽轮机内缸或隔套板进行热喷涂路径规划,将汽轮机内缸或隔套板立装设置,其内装的叶片形成m级且从下至上依次为第1级、第2级
……
第m级;
5.该方法包括:对每级的叶顶半圆弧面进行热喷涂,每级热喷涂路径规划相同,
6.对第1级人工设置三个基准示教点p1、p2、p3,并设置喷枪进出余量,按基准示教点规划出的路径完成第1级热喷涂;根据级间相对位置关系将基准示教点依次向第2级、第3级
……
第m级进行映射,依次获取第2级、第3级
……
第m级的映射示教点,每级按其映射示教点规划出的路径完成热喷涂。
7.优选地,每级热喷涂路径径规划均采用单条路线往复循环的方法,相邻两条单条路线之间沿竖直方向偏移,使得每级热喷涂路径为s形。
8.优选地,相邻两条单条路线之间沿竖直方向偏移量为2~4mm。
9.优选地,第1级人工设置三个基准示教点p1、p2、p3选取该级最下端半圆弧线的起始点、中间点及终止点。
10.优选地,喷枪的位置沿叶顶向圆心径向偏移30~50mm,喷枪进出余量分别为10~40mm和40~70mm。
11.优选地,第2级、第3级
……
第m级的映射示教点,具体第j级的映射示教点的确定方法为:
12.第1个映射示教点:以p1为基准,沿高度方向偏移j=2,3,...,m,a
j
‑
(j
‑
1)
表示第j级和第j
‑
1级之间级间距,沿径向偏移δr,式中d
j
表示第j级的叶顶直径,d1表示第1级的叶顶直径;
13.第2个映射示教点:以p2为基准,沿高度方向偏移沿径向偏移δr;
14.第3个映射示教点:以p3为基准,沿高度方向偏移沿径向偏移δr。
15.本发明的有益效果:
16.(1)对于级数很多的内缸/隔板套,本发明只需要示教三个点,编程工作不再与级数成正比,大大减轻了编程的工作量;
17.(2)对于级数较多的内缸/隔板套,立着喷涂时,上部的级太高,手动示教在空间上难以到达,需要一个人站在梯子上观察喷枪距离和角度,另一个人操作示教器,本发明只需示教最低一级的三个点,可以避免此类困难;
18.(3)对于多级内缸/隔板套,只需要示教三个点确定第一级喷涂路径,其余各级喷涂路径根据图纸尺寸来获得,而不是每级都需要人工示教,减小了人工操作引入的误差,极大地提高了喷涂路径的精度。
附图说明
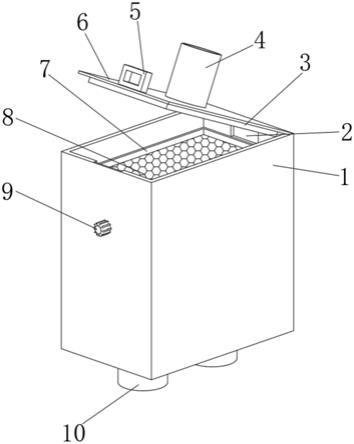
19.图1是安装有叶片的汽轮机内缸/隔套板的结构示意图,p1、p2、p3是在多个叶片的叶顶形成的半圆上选取的三个示教点;
20.图2是热喷涂路径规则示意图;
21.图3是图1的剖视图。
具体实施方式
22.具体实施方式一:下面结合图1~3说明本实施方式,本实施方式所述一种汽轮机热喷涂路径规划方法,该方法用于对汽轮机内缸或隔套板等零件进行热喷涂路径规划。
23.将汽轮机内缸或隔套板立装设置,其内装的叶片形成m级且从下至上依次为第1级、第2级
……
第m级;m≥2,本实施方式方法应用于m大于20级的情况时相较于传统方法的优势更突出。
24.该方法包括:对每级的叶顶半圆弧面进行热喷涂,每级热喷涂路径规划相同,
25.对第1级人工设置三个基准示教点p1、p2、p3,并设置喷枪进出余量,按基准示教点规划出的路径完成第1级热喷涂;根据级间相对位置关系将基准示教点依次向第2级、第3级
……
第m级进行映射,依次获取第2级、第3级
……
第m级的映射示教点,每级按其映射示教点规划出的路径完成热喷涂。
26.在整个零件的热喷涂规划路径时,每级的操作方式相同,只是示教方式与传统方
式不同,传统方式是每级都有三个示教点,而本实施方式只在第1级人工给出三个基准示教点,其它级的示教点都是根据基准示教点计算得出的,而非人工给出,即不需要每级都人工引领喷枪走一遍示教点,只需在第1级时人工引领即可,其它级根据本实施方式给出的方法自动定位实施热喷涂操作。
27.参见图2,喷枪的位置沿叶顶向圆心径向偏移30~50mm,即喷枪在零件内部,相对于喷涂面向内收缩一定位置,收缩偏移的量30~50mm与喷枪火焰的长度相匹配。
28.喷枪进出余量分别为10~40mm和40~70mm。这样设置的原因是,叶片的断面是斜面,多个叶片组成的叶顶面主体是圆形,但在其半圆的端部位置斜面是伸出一点儿距离的,参见图1的虚线位置,为了喷涂完整,必然要延伸出一段距离,至于喷枪出枪位置p3的偏移量较进枪位置p1的偏移量更大一些是为了方便挂带试片。
29.每级热喷涂路径径规划均采用单条路线往复循环的方法,相邻两条单条路线之间沿竖直方向偏移,使得每级热喷涂路径为s形。
30.相邻两条单条路线之间沿竖直方向偏移量为2~4mm。
31.参见图1和图2,第1级人工设置三个基准示教点p1、p2、p3选取该级最下端半圆弧线的起始点、中间点及终止点。
32.手动示教的单条路线程序:人工引导喷枪手动示教第1级的p1、p2和p3三个点,走一条圆弧,对p1、p3两个点进行偏移,得到单条路线的起点和终点,如此设计出单条路线,单条路线程序如下:
33.movej offs(p1,
‑
40,0,0),v100,z5,tool3;
34.movel offs(p1,0,0,0),v300,z5,tool3;
35.movec offs(p2,0,0,0),offs(p3,0,0,0),v300,z5,tool3;
36.movel offs(p3,
‑
70,0,0),v300,z5,tool3;
37.其中的
‑
40和
‑
70为p1和p3进出偏移的长度,可以根据实际需要进行更改。
38.进一步的,第1级路线程序:沿单条路线,机器人从左边运动到右边,然后将单条路线沿零件径向偏移一个步进量4,机器人反向运动回到左边,再偏移一个步进量4,从左边运动到右边
…
以此循环往复,得到第一级的喷涂程序,程序路线类似s形。第1级喷涂程序如下:
39.for i from 0to 11do
40.movej offs(p1,
‑
40,0,i*8),v100,z5,tool3;
41.movel offs(p1,0,0,i*8),v300,z5,tool3;
42.movec offs(p2,0,0,i*8),offs(p3,0,0,i*8),v300,z5,tool3;
43.movel offs(p3,
‑
70,0,i*8),v300,z5,tool3;
44.movej offs(p3,
‑
70,0,i*8 4),v100,z5,tool3;
45.movel offs(p3,0,0,i*8 4),v300,z5,tool3;
46.movec offs(p2,0,0,i*8 4),offs(p1,0,0,i*8 4),v300,z5,tool3;
47.movel offs(p1,
‑
40,0,i*8 4),v300,z5,tool3;
48.endfor
49.其中i的循环次数和步进量4可以根据需要进行更改。
50.第2级、第3级
……
第m级的映射示教点,具体第j级的映射示教点的确定方法为:
51.第1个映射示教点:以p1为基准,沿高度方向偏移j=2,3,...,m,a
j
‑
(j
‑
1)
表示第j级和第j
‑
1级之间级间距,沿径向偏移δr,式中d
j
表示第j级的叶顶直径,d1表示第1级的叶顶直径;
52.j=2时,p1点坐标沿高度方向偏移a1,j=3时,p1点坐标沿高度方向偏移a1 a2,其中a1为第2级和第1级的级间距,a2是第3级与第2级之间的级间距;
53.j=2时,p1点坐标沿径向偏移j=3时,p1点坐标沿径向偏移其中d1是第1级叶顶圆弧的直径,d2是第2级叶顶圆弧的直径,d3是第3级叶顶圆弧的直径。
54.第2个映射示教点:以p2为基准,沿高度方向偏移沿径向偏移δr;
55.第3个映射示教点:以p3为基准,沿高度方向偏移沿径向偏移δr。
56.以m=3为例描述整个路径程序:根据零件不同级直径关系和级间距,对p1、p2和p3三个点进行偏移映射至其它级中,将第1级路线程序应用到所有级。完整喷涂路径程序如下:
57.proc path3()
58.d1:=1164.4;
59.d2:=1171.4;
60.d3:=1177.4;
61.a1:=132.03;
62.a2:=122.49;
63.movej home,v300,z5,tool3;
64.movej offs(p1,
‑
40,0,0),v300,z5,tool3;
65.for i from 0to 11do
66.movej offs(p1,
‑
40,0,i*8),v100,z5,tool3;
67.movel offs(p1,0,0,i*8),v300,z5,tool3;
68.movec offs(p2,0,0,i*8),offs(p3,0,0,i*8),v300,z5,tool3;
69.movel offs(p3,
‑
70,0,i*8),v300,z5,tool3;
70.movej offs(p3,
‑
70,0,i*8 4),v100,z5,tool3;
71.movel offs(p3,0,0,i*8 4),v300,z5,tool3;
72.movec offs(p2,0,0,i*8 4),offs(p1,0,0,i*8 4),v300,z5,tool3;
73.movel offs(p1,
‑
40,0,i*8 4),v300,z5,tool3;
74.endfor
75.movej offs(p1,
‑
40,(d2
‑
d1)/2,a1),v300,z5,tool3;
76.for i from 0to 10do
77.movej offs(p1,
‑
40,(d2
‑
d1)/2,i*8 a1),v100,z5,tool3;
78.movel offs(p1,0,(d2
‑
d1)/2,i*8 a1),v300,z5,tool3;
79.movec offs(p2,(d2
‑
d1)/2,0,i*8 a1),offs(p3,0,
‑
(d2
‑
d1)/2,i*8 a1),v300,z5,tool3;
80.movel offs(p3,
‑
70,
‑
(d2
‑
d1)/2,i*8 a1),v300,z5,tool3;
81.movej offs(p3,
‑
70,
‑
(d2
‑
d1)/2,i*8 4 a1),v100,z5,tool3;
82.movel offs(p3,0,
‑
(d2
‑
d1)/2,i*8 4 a1),v300,z5,tool3;
83.movec offs(p2,(d2
‑
d1)/2,0,i*8 4 a1),offs(p1,0,(d2
‑
d1)/2,i*8 4 a1),v300,z5,tool3;
84.movel offs(p1,
‑
40,(d2
‑
d1)/2,i*8 4 a1),v300,z5,tool3;
85.endfor
86.movej offs(p1,
‑
40,(d3
‑
d1)/2, a1 a2),v300,z5,tool3;
87.for i from 0to 10do
88.movej offs(p1,
‑
40,(d3
‑
d1)/2,i*8 a1 a2),v100,z5,tool3;
89.movel offs(p1,0,(d3
‑
d1)/2,i*8 a1 a2),v300,z5,tool3;
90.movec offs(p2,(d3
‑
d1)/2,0,i*8 a1 a2),offs(p3,0,
‑
(d3
‑
d1)/2,i*8 a1 a2),v300,z5,tool3;
91.movel offs(p3,
‑
70,
‑
(d3
‑
d1)/2,i*8 a1 a2),v300,z5,tool3;
92.movej offs(p3,
‑
70,
‑
(d3
‑
d1)/2,i*8 4 a1 a2),v100,z5,tool3;
93.movel offs(p3,0,
‑
(d3
‑
d1)/2,i*8 4 a1 a2),v300,z5,tool3;
94.movec
95.offs(p2,(d3
‑
d1)/2,0,i*8 4 a1 a2),offs(p1,0,(d3
‑
d1)/2,i*8 4 a1 a2),v300,z5,tool3;
96.movel offs(p1,
‑
40,(d3
‑
d1)/2,i*8 4 a1 a2),v300,z5,tool3;
97.endfor
98.movej home,v300,z5,tool3;
99.endproc
100.其中d1、d2、d3
…
为各级喷涂直径,a1、a2
…
为各级之间的级间距,需要根据图纸尺寸进行输入,如图3所示;
101.可见,本实施方式记载的方法可应用于任意等级的路径规划中,常用的内缸/隔板套,级数通常在25级以内,就在机器人程序中写入1
‑
25级所有零件的程序,生产过程中需要喷涂某级数的零件,直接选用相应级数的程序,修改p1、p2、p3三个点的位置以及直径d1、d2、d3
…
和级间距a1、a2
…
的值即可。达到了只示教一级三个示教点就完成路径规划的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。