1.本发明涉及一种处理装置,尤其涉及一种废弃电子元器件环保回收处理装置。
背景技术:
2.电子元器件指的是电子元件和小型的机器、仪器的组成部分,常指电器、无线电、仪表等工业的某些零件,废弃后的电子元器件内仍还有大量部件,直接将其丢弃,不仅可能造成污染,同时浪费资源,因此需要对废弃的电子元器件进行回收处理。
3.现有的废弃的电子元器件回收处理技术,一般是利用转动的粉碎杆将其碾碎后,再使用置物框将碾碎后的碎屑借助收集起来,然而反复搬动置物框来收集或清理碎屑,操作麻烦费力,其次电子元器件内的部件分为金属和非金属,如此收集不利于分类回收,并且在粉碎电子元器件时,产生大量粉尘,影响空气环境,同时碾碎的电子元器件碎屑可能随意飞溅伤人,最后置物框未被固定住,可能随意移动影响收集。
4.因此,有必要设计一种智能地自动处理废弃电子元器件,方便收集废弃电子元器件的废弃电子元器件环保回收处理装置。
技术实现要素:
5.本发明针对现有技术的不足,提供一种智能地自动处理废弃电子元器件,方便收集废弃电子元器件的废弃电子元器件环保回收处理装置。
6.本发明的目的可采用以下技术方案来达到:第一方面,一种废弃电子元器件环保回收处理装置,包括有:底座,所述底座上部连接有外壳;放置架,所述外壳内上部一侧连接有所述放置架;粉碎杆,所述放置架下部两侧均转动式连接有所述粉碎杆;旋转组件,所述外壳上部与粉碎杆一侧之间设有所述旋转组件;收集组件,所述底座上部一侧设有所述收集组件。
7.进一步地,旋转组件包括有:第一驱动电机,所述外壳内上部一侧安装有所述第一驱动电机;转动杆,所述第一驱动电机一侧连接有所述转动杆;第一齿轮,所述转动杆一侧连接有所述第一齿轮;第二齿轮,所述粉碎杆一侧均连接有所述第二齿轮,所述第二齿轮与所述第一齿轮相互啮合;第一启动按键,所述外壳上部一侧中间安装有所述第一启动按键。
8.进一步地,收集组件包括有:轮胎,所述底座上部一侧对称放置有两个所述轮胎;转轴,所述轮胎中部均连接有所述转轴;第一置物框,所述转轴内侧之间转动式连接有所述第一置物框;把手,所述第一置物框上部一侧连接有所述把手;支撑板,所述第一置物框内部下侧连接有所述支撑板;第二置物框,所述第一置物框上部一侧转动式连接有所述第二置物框,所述第二置物框底座与所述支撑板相接触。
9.进一步地,还包括有吸取组件,吸取组件包括有:第一导杆,所述外壳内下部两侧均连接有所述第一导杆;活动架,所述第一导杆之间两侧均滑动式连接有所述活动架;第一弹簧,所述活动架之间连接有所述第一弹簧,所述第一弹簧套在一侧所述第一导杆上;电动推杆,所述外壳内下部一侧安装有所述电动推杆,所述电动推杆伸缩杆一侧与一侧所述活
动架相连接;第一电磁铁,一侧所述活动架一侧转动式连接有所述第一电磁铁;第一齿条,一侧所述活动架下部一侧连接有所述第一齿条;第二电磁铁,一侧所述第一活动架一侧转动式连接有所述第二电磁铁;第二齿条,一侧所述活动架下部一侧连接有所述第二齿条;第三齿轮,所述外壳内下部一侧转动式连接有所述第三齿轮,所述第三齿轮与所述第一齿条和所述第二齿条相互啮合;接触杆,所述第一电磁铁和所述第二电磁铁上部两侧均连接有所述接触杆;第一支撑架,所述放置架中部两侧均连接有所述第一支撑架;接触板,所述第一支撑架下部两侧均连接有所述接触板,所述接触杆与所述接触板相互配合;第二启动按键,所述外壳下部一侧安装有所述第二启动按键;红外传感器,所述外壳内下部一侧安装有所述红外传感器。
10.进一步地,还包括有吸尘组件,吸尘组件包括有:静音抽气泵,所述外壳内上部一侧安装有所述静音抽气泵;进气管,所述静音抽气泵下部一侧与所述放置架上部两侧之间连接有所述进气管;吸尘罩,所述进气管上部一侧对称连接有所述吸尘罩;集尘箱,所述底座上部一侧连接有所述集尘箱;出气管,所述集尘箱与所述静音抽气泵下部一侧之间连接有所述出气管;粉尘传感器,所述放置架内中部一侧安装有所述粉尘传感器。
11.进一步地,还包括有防护组件,防护组件包括有:滑套,所述外壳上部一侧连接有所述滑套;滑杆,所述滑套内侧对称滑动式连接有所述滑杆;防护罩,所述滑杆外侧均连接有所述防护罩;第三齿条,一侧所述防护罩中部一侧连接有所述第三齿条;第四齿条,一侧所述防护罩中部一侧连接有所述第四齿条;第二驱动电机,所述外壳内上部一侧安装有所述第二驱动电机;第四齿轮,所述第二驱动电机输出轴一侧连接有所述第四齿轮,所述第四齿轮与所述第三齿条和所述第四齿条相互啮合。
12.进一步地,还包括有固定组件,固定组件包括有:滑动架,所述底座内部中间滑动式连接有所述滑动架;踏板,所述滑动架上部一侧连接有所述踏板;第二弹簧,所述滑动架与所述底座之间对称连接有所述第二弹簧;挡杆,所述滑动架上部一侧对称连接有所述挡杆;固定架,所述第一置物框上部一侧连接有所述固定架,所述固定架与所述挡杆相互配合。
13.进一步地,还包括有控制箱,控制箱连接在外壳上部后侧,控制箱内包括有开关电源、电源模块和控制模块,开关电源为整个装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块与电源模块通过电性连接,粉尘传感器、红外传感器、距离传感器、第一启动按键和第二启动按键均与控制模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一驱动电机、第二驱动电机、电动推杆、第一电磁铁、第二电磁铁和静音抽气泵均与控制模块通过继电器控制模块连接。
14.本发明的优点在于:(1)本发明通过按下第一启动按键,控制第一电磁铁、第二电磁铁和接触杆向内侧移动,接触杆与接触板,使得第一电磁铁和第二电磁铁向外侧转动,红外传感器感应不到左侧活动架后,控制第一电磁铁和第二电磁铁将电子元器件的金属部件吸附住,达到智能地自动吸附电子元器件内的金属,方便分类回收电子元器件的部件的效果;(2)本发明通过粉尘传感器感应到放置架内的粉尘浓度大于预设值后,控制启动静音抽气泵,通过吸尘罩吸收粉尘,最终传输至集尘箱内,达到智能地自动吸收清除粉尘的效果;(3)本发明通过距离传感器感应到与右侧活动架距离小于预设值后,控制第二驱动电机运转动两秒后关闭,带动第四齿轮转动,带动第三齿条、第四齿条和防护罩向外侧移动,打开
放置架,达到智能地自动控制打开或闭合放置架的效果,避免碎屑飞溅;(4)本发明通过踩下踏板,推动滑动架和挡杆向下移动,挡杆远离固定架后,即可拉动第一置物框和第二置物框向前移动,达到方便固定置物框的效果,避免置物框随意移动。
附图说明
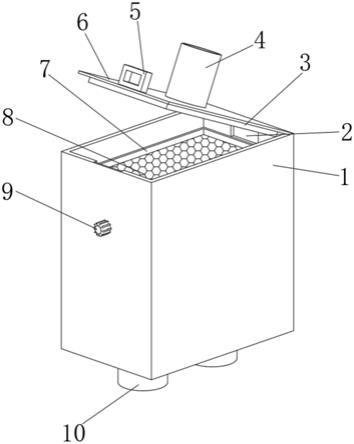
15.图1为本发明的立体结构示意图。
16.图2为本发明的第一部分的立体结构示意图。
17.图3为本发明的第二部分的立体结构示意图。
18.图4为本发明的第三部分的立体结构示意图。
19.图5为本发明的第四部分的立体结构示意图。
20.图6为本发明的旋转组件的安装示意图。
21.图7为本发明的收集组件的第一部分的立体结构示意图。
22.图8为本发明的收集组件的第二部分的立体结构示意图。
23.图9为本发明的吸取组件的安装示意图。
24.图10为本发明的吸取组件的立体结构示意图。
25.图11为本发明的吸取组件与放置架的部分立体结构示意图。
26.图12为本发明的吸取组件与收集组件的部分立体结构示意图。
27.图13为本发明的吸取组件与防护组件的部分立体结构示意图。
28.图14为本发明的吸尘组件的立体结构示意图。
29.图15为本发明的防护组件的立体结构示意图。
30.图16为本发明的固定组件的立体结构示意图。
31.图17为本发明的固定组件与收集组件的部分立体结构示意图。
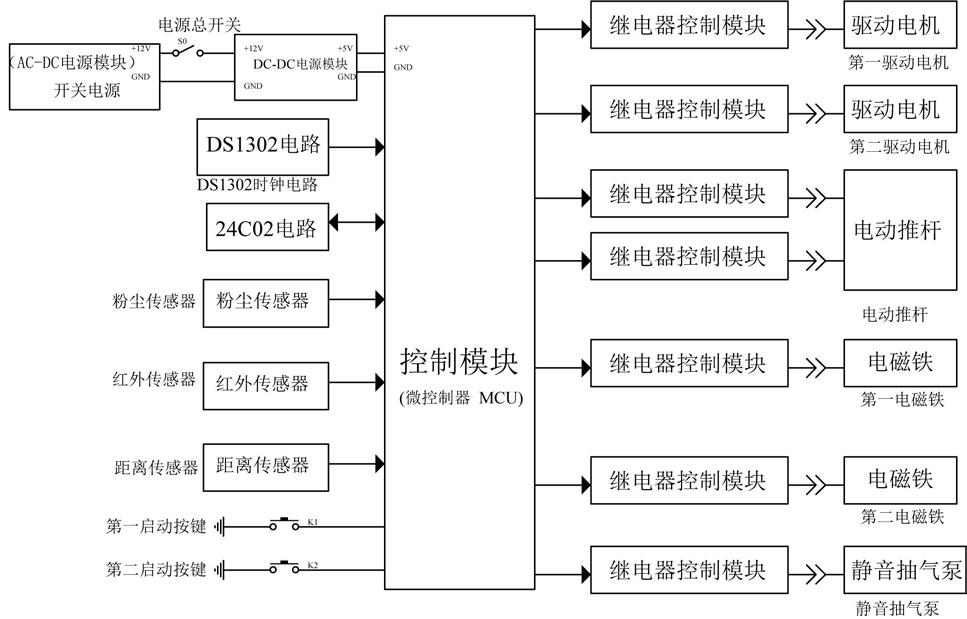
32.图18为本发明的电路框图。
33.图19为本发明的电路原理图。
34.图中标号名称:1、底座,2、外壳,3、放置架,4、粉碎杆,5、控制箱,6、旋转组件,601、第一驱动电机,602、转动杆,603、第一齿轮,604、第二齿轮,605、第一启动按键,7、收集组件,701、第一置物框,702、把手,703、转轴,704、轮胎,705、第二置物框,706、支撑板,8、吸取组件,801、第一导杆,802、活动架,803、电动推杆,804、第一弹簧,805、第一电磁铁,806、第一齿条,807、第二电磁铁,808、第二齿条,809、第三齿轮,810、接触杆,811、第一支撑架,812、接触板,813、第二启动按键,814、红外传感器,9、吸尘组件,901、静音抽气泵,902、进气管,903、吸尘罩,904、出气管,905、集尘箱,906、粉尘传感器,10、防护组件,1001、滑套,1002、滑杆,1003、防护罩,1004、第三齿条,1005、第二驱动电机,1006、第四齿轮,1007、第四齿条,1008、距离传感器,11、固定组件,1101、滑动架,1102、踏板,1103、第二弹簧,1104、挡杆,1105、固定架。
具体实施方式
35.以下结合具体实施例对上述方案做进一步说明。应理解,这些实施例是用于说明本技术而不限于限制本技术的范围。实施例中采用的实施条件可以根据具体厂家的条件做进一步调整,未注明的实施条件通常为常规实验中的条件。
36.实施例1如图1~图8所示,本实施例公开一种废弃电子元器件环保回收处理装置,包括有底座1、外壳2、放置架3、粉碎杆4、旋转组件6和收集组件7,底座1上部连接有外壳2,外壳2内上部前侧连接有放置架3,放置架3下部前后两侧均转动式连接有粉碎杆4,外壳2上部与粉碎杆4右侧之间设有旋转组件6,底座1上部前侧设有收集组件7。
37.当使用者需要回收废弃电子元器件时,使用首先按下电源总开关,为本装置通上电,随后将废气的电子元器件倒入到放置架3内,手动按下旋转组件6,使得控制模块控制旋转组件6运作,带动粉碎杆4转动,将废弃电子元器件碾碎,碾碎的电子元器件中的金属和非金属全部掉落至收集组件7内,废弃的电子元器件处理完毕后,再次按下旋转组件6,使得控制模块控制旋转组件6停止运作,粉碎杆4停止转动,而后手动拉动收集组件7向前移出外壳2范围,并将碾碎的电子元器件碎屑全部倒出回收,随后将收集组件7恢复原状后,推动收集组件7向后移动回到原位置,最后使用者再次按下电源总开关,为装置断电。
38.旋转组件6包括有第一驱动电机601、转动杆602、第一齿轮603、第二齿轮604和第一启动按键605,外壳2内上部右前侧安装有第一驱动电机601,第一驱动电机601左侧连接有转动杆602,转动杆602左侧连接有第一齿轮603,粉碎杆4右侧均连接有第二齿轮604,第二齿轮604与第一齿轮603相互啮合,外壳2上部前侧中间安装有第一启动按键605。
39.收集组件7包括有第一置物框701、把手702、转轴703、轮胎704、第二置物框705和支撑板706,底座1上部前侧左右对称放置有两个轮胎704,轮胎704中部均连接有转轴703,转轴703内侧之间转动式连接有第一置物框701,第一置物框701上部前侧连接有把手702,第一置物框701内部下侧连接有支撑板706,第一置物框701上部后侧转动式连接有第二置物框705,第二置物框705底座1与支撑板706相接触。
40.使用首先按下电源总开关,为本装置通上电,随后将废气的电子元器件倒入到放置架3内,手动按下第一启动按键605,使得控制模块控制第一驱动电机601运转,带动转动杆602和第一齿轮603转动,从而带动第二齿轮604转动,进而带动粉碎杆4转动,将电子元器件碾碎,碾碎的电子元器件中的金属和非金属全部掉落至第一置物框701和第二置物框705内,废弃的电子元器件处理完毕后,再次按下第一启动按键605,使得控制模块控制第一驱动电机601停止运转,使得粉碎杆4停止转动,随后拉动把手702、第一置物框701和第二置物框705向前移动,从而带动轮胎704向前移动并转动,第一置物框701移出外壳2范围后,逆时针180度转动第二置物框705,将第二置物框705内的电子元器件碎屑倒出回收,并将第一置物框701内的电子元器件碎屑全部清理回收,再顺时针180度转动第二置物框705,推动第一把手702、第一置物框701和第二置物框705后移动,带动轮胎704向后移动并反向转动,恢复至原状态,最后使用者再次按下电源总开关,为装置断电,达到智能地自动处理废弃电子元器件和方便收集废弃电子元器件的效果。
41.实施例2如图1~图4、图9~图19所示,在有些实施例中,还包括有吸取组件8,吸取组件8包括有第一导杆801、活动架802、电动推杆803、第一弹簧804、第一电磁铁805、第一齿条806、第二电磁铁807、第二齿条808、第三齿轮809、接触杆810、第一支撑架811、接触板812、第二启动按键813和红外传感器814,外壳2内下部前后两侧均连接有第一导杆801,第一导杆801之间左右两侧均滑动式连接有活动架802,活动架802之间连接有第一弹簧804,第一弹簧
804套在后侧第一导杆801上,外壳2内下部左侧安装有电动推杆803,左侧活动架802右侧转动式连接有第一电磁铁805,电动推杆803伸缩杆右侧与左侧活动架802相连接,左侧活动架802下部后侧连接有第一齿条806,右侧第一活动架802左侧转动式连接有第二电磁铁807,右侧活动架802下部后侧连接有第二齿条808,外壳2内下部后侧转动式连接有第三齿轮809,第三齿轮809与第一齿条806和第二齿条808相互啮合,第一电磁铁805和第二电磁铁807上部前后两侧均连接有接触杆810,放置架3中部前后两侧均连接有第一支撑架811,第一支撑架811下部左右两侧均连接有接触板812,接触杆810与接触板812相互配合,外壳2下部前侧安装有第二启动按键813,外壳2内下部左前侧安装有红外传感器814。
42.按下第二启动按键813,使得控制模块控制电动推杆803伸缩杆伸长两秒后停止运作,带动左侧活动架802、第一电磁铁805、第一齿条806和左侧接触杆810向右移动,带动第三齿轮809转动,从而带动第二齿条808、右侧活动架802、第二电磁铁807和右侧接触杆810向左移动,第一弹簧804被压缩,当红外传感器814感应不到左侧活动架802时,控制模块将控制启动第一电磁铁805和第二电磁铁807,同时接触杆810移动至接触到接触板812后,将被推动向外侧转动,带动第一电磁铁805和第二电磁铁807向外侧转动,使得碾碎后电子元器件内的金属部件从放置架3内掉出后,被第一电磁铁805和第二电磁铁807吸附住,而碾碎后电子元器件内的非金属部件掉落至第二置物框705内,电子元器件处理完毕后,再次按下第二启动按键813,使得控制模块控制电动推杆803伸缩杆缩短两秒后停止运作,带动左侧活动架802、第一电磁铁805、第一齿条806和左侧接触杆810向左移动,带动第三齿轮809反向转动,从而带动第二齿条808、右侧活动架802、第二电磁铁807和右侧接触杆810向右移动,第一弹簧804回伸,即带动被吸附的电子元器件非金属部件向外侧移动,接触杆810移动远离接触板812后,在重力作用下,使得第一电磁铁805和第二电磁铁807向内侧转动,当红外传感器814感应到左侧活动架802时,控制模块将控制关闭第一电磁铁805和第二电磁铁807,不再吸附金属部件,使得电子元器件的金属部件向下掉落至第一置物框701内,最后即可倒出第二置物框705内的非金属部件和清理掉第一置物框701内的金属部件,分类回收,达到智能地自动吸附电子元器件内的金属,方便分类回收电子元器件的部件的效果。
43.还包括有吸尘组件9,吸尘组件9包括有静音抽气泵901、进气管902、吸尘罩903、出气管904、集尘箱905和粉尘传感器906,外壳2内上部后侧安装有静音抽气泵901,静音抽气泵901下部左前侧与放置架3上部左右两侧之间连接有进气管902,进气管902上部前侧左右对称连接有吸尘罩903,底座1上部后侧连接有集尘箱905,集尘箱905与静音抽气泵901下部右前侧之间连接有出气管904,放置架3内中部前侧安装有粉尘传感器906。
44.粉碎杆4在碾碎废弃电子元器件时,将产生大量粉尘,粉尘传感器906中设置有预设值,当放置架3内的粉尘浓度大于预设值后,控制模块将控制启动静音抽气泵901,通过进气管902、吸尘罩903和出气管904,将放置架3内的粉尘吸收后传输到集尘箱905内,放置架3内的粉尘浓度逐渐降低,当放置架3内的粉尘浓度小于预设值后,控制模块将控制关闭静音抽气泵901,吸尘罩903停止吸收粉尘,达到智能地自动吸收清除粉尘的效果。
45.还包括有防护组件10,防护组件10包括有滑套1001、滑杆1002、防护罩1003、第三齿条1004、第二驱动电机1005、第四齿轮1006和第四齿条1007,外壳2上部后侧连接有滑套1001,滑套1001内侧左右对称滑动式连接有滑杆1002,滑杆1002外侧均连接有防护罩1003,左侧防护罩1003中部左侧连接有第三齿条1004,右侧防护罩1003中部右侧连接有第四齿条
1007,外壳2内上部前侧安装有第二驱动电机1005,第二驱动电机1005输出轴后侧连接有第四齿轮1006,第四齿轮1006与第三齿条1004和第四齿条1007相互啮合。
46.距离传感器1008中设置有预设值,当右侧活动架802向左移动至与距离传感器1008的距离小于预设值后,即上一轮废弃电子元器件处理完毕后,控制模块将控制启动第二驱动电机1005运转两秒后停止,带动第四齿轮1006转动,从而带动第三齿条1004和第四齿条1007向外侧移动,进而带动防护罩1003向外侧移动,即可将新的废弃电子元器件倒入到放置架3内,随后右侧活动架802向右移动至与距离传感器1008的距离大于预设值后,控制模块将控制第二驱动电机1005反向运转两秒后关闭,带动第四齿轮1006反向转动,从而带动第三齿条1004和第四齿条1007向内侧移动,进而带动防护罩1003向内侧移动,闭合放置架3,如此往复,达到智能地自动控制打开或闭合放置架3的效果,避免碎屑飞溅。
47.还包括有固定组件11,固定组件11包括有滑动架1101、踏板1102、第二弹簧1103、挡杆1104和固定架1105,底座1内部中间滑动式连接有滑动架1101,滑动架1101上部前侧连接有踏板1102,滑动架1101与底座1之间左右对称连接有第二弹簧1103,滑动架1101上部后侧左右对称连接有挡杆1104,第一置物框701上部后侧连接有固定架1105,固定架1105与挡杆1104相互配合。
48.初始状态下,挡杆1104插在固定架1105内将第一置物框701固定住,电子元器件处理完毕后,踩压踏板1102,推动滑动架1101和挡杆1104向下移动,第二弹簧1103被压缩,挡杆1104远离固定架1105后,即可拉动第一置物框701和第二置物框705向前移动,最终使得第一置物框701和第二置物框705移出外壳2范围,并将碾碎的电子元器件部件清理回收,第一置物框701后移动回到原位置后,松开踏板1102,在第二弹簧1103的作用下,推动滑动架1101、踏板1102和挡杆1104向上移动,挡杆1104插入到固定架1105内,将第一置物框701固定住,如此往复,达到方便固定置物框的效果,避免置物框随意移动。
49.还包括有控制箱5,控制箱5连接在外壳2上部后侧,控制箱5内包括有开关电源、电源模块和控制模块,开关电源为整个装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块与电源模块通过电性连接,粉尘传感器906、红外传感器814、距离传感器1008、第一启动按键605和第二启动按键813均与控制模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一驱动电机601、第二驱动电机1005、电动推杆803、第一电磁铁805、第二电磁铁807和静音抽气泵901均与控制模块通过继电器控制模块连接。
50.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。