1.本实用新型涉及无人机控制领域,更具体地,涉及一种舵机控制的双翼无人机。
背景技术:
2.双旋翼无人机向前飞行时,桨面向前倾转,在飞行中的无人机可以将升力快速转化成向前的牵引力,双旋翼无人机效率会更高,加速度也会更快。转弯时,依靠舵机差动控制,可以借助升力分量转弯,可以有更多的力用在转角力上,转弯速度也会更快,飞行会更加灵活。
3.目前,双旋翼无人机的飞控算法非常复杂,不仅要考虑旋翼的控制,还要结合舵机倾转等结构方面的协调,现有双旋翼结构设置依旧不合理,对飞控算法及其控制系统的设置要求较高。
4.具体的,现有的双旋翼无人机的中旋翼所对应的电机只能用于控制旋翼的启动、启动速度,从而实现无人机自身的上下、左右移动,需要进一步结合控制旋翼翻转的舵机,才能实现无人机的俯仰转向,在具体的舵机应用方式,较常见的是将舵机设置于机身内部,通过舵机带动飞行杆、旋翼、旋翼电机等结构实施方式,实施所述方式时,不难发现,舵机与所述旋翼的距离包括了飞行杆结构,而常见的飞行杆结构几乎为斜向上对称设计与机身两侧,舵机在此实施方式中,舵机在驱动时的力臂至少包括了一段飞行杆的距离及驱动需要克服的重力,对旋翼翻转的角度控制效率不高,当遇到自然风力等不利因素时,舵机控制的应急性并不理想,且耗能较高。
技术实现要素:
5.本实用新型旨在克服所述现有技术的至少一种缺陷(不足),提供一种舵机控制的双翼无人机,从结构上简化无人机对双旋翼的控制方式,提高无人机的控制效率,尤其是角度控制效率。
6.本实用新型采取的技术方案是,
7.一种舵机控制的双翼无人机,包括机身、舵机,所述机身的两侧对称固定有两个飞行杆,所述飞行杆斜向上设置,所述飞行杆远离所述机身的一端活动连接有旋翼电机,用于带动所述旋翼的转动,所述飞行杆远离所述机身的一端还设置有舵机,用于控制所述旋翼电机及其旋翼的翻转,所述飞行杆远离所述机身的一端固定连接有调节支架,所述舵机通过所述调节支架控制所述旋翼电机及其旋翼的翻转;
8.当所述旋翼电机启动时,所述旋翼受所述旋翼电机驱动带动所述机身升降或左右转向,当所述舵机启动时,所述舵机驱动所述旋翼电机和所述旋翼使其翻转一定角度,结合所述旋翼电机的驱动,进一步实现所述机身的俯仰转向。
9.本实用新型在设计舵机的控制方式时,考虑了飞行杆与舵机控制的相应关系,创造性地将舵机设置在飞行末端,即飞行杆远离所述机身的一端,从而可以保证飞行杆下端与机身固定连接,具体可以是刚性连接,增加无人机自身的飞行稳定性;同时,通过设置一
种调节支架,这种调节支架与飞行杆末端固定连接,则可以总共可以看成是无人机中飞行杆上的两处固定连接点,减少飞行杆对电机或者舵机控制的影响;通过在调节支架上设置安装旋翼及其旋翼电机,由同样安装在飞行杆末端的舵机控制旋翼及其旋翼电机的翻转,从而可以实现旋翼的控制端均位于飞行杆上的同一端,使得舵机驱动的力臂最小化,减少舵机的能耗,也有利于后续对无人机控制系统的设计。
10.作为一种优选的实施方式,所述调节支架设有调节块、竖直部,所述调节块转动连接所述竖直部,用于提供可旋转的水平支撑面,所述旋翼电机与所述水平支撑面固定连接,用于旋转支撑所述旋翼电机,所述舵机具有输出轴,所述调节块连接所述输出轴,用于带动所述水平支撑面的翻转。
11.为实现调节支架与旋翼及其旋翼电机的连接,本实用新型设计的调节块与竖直部转动连接时,提供了一个水平支撑面,所述水平支撑面中的“水平”,包括一水平支撑轴,即旋翼电机的支撑包括但不限于水平方向上的支撑,即本实用新型限定的水平支撑面是基于所述水平支撑轴上可翻转的面,并且,通过输出轴与调节块的固定连接,提供一种具体的舵机带动旋翼翻转的结构,其中,舵机与调节支架的设计在本方案中,可以是舵机直接固定在飞行杆的中途部靠近调节支架的部分,也可以是将舵机设置在调节支架上,最后均固定连接调节块的一端用于带动调节块的转动即可。
12.作为一种优选的实施方式,所述竖直部包括第一凸起、第二凸起,所述第一凸起与所述第二凸起分别转动连接所述调节块,所述调节支架还设有底座,所述底座与所述第一凸起与所述第二凸起固定连接,所述底座的下侧与所述飞行杆远离所述机身的一端刚性连接。
13.为实现调节块的可翻转,本实用新型进一步限定竖直部的结构,为两个均与调节块转动连接的凸起,将旋翼结构悬空于所述飞行杆并转动支撑于调节支架,用于实现旋翼转动,同时,本实用新型还进一步限定于飞行杆固定连接的底座结构,通过底座与飞行杆的刚性连接,将旋翼的驱动部位集中限制于飞行杆远离机身的一端,克服了飞行杆做为驱动力臂的可能。
14.进一步的,所述第一凸起设有第一旋转孔,所述第二凸起设有第二旋转孔,所述调节块分别与所述第一旋转孔、所述第二旋转孔活动连接。
15.作为一种优选的实施方式,所述调节支架的第一凸起为拆卸安装的活动块,所述底座设有对应所述第一螺纹孔的第二螺纹孔及用于活动块安装限位的安装槽,实现所述活动块与所述调节支架的固定连接。
16.进一步的,为实现舵机与调节块的转动传动连接,所述调节块设有第一旋转柱、第二旋转块,所述第一旋转柱设于所述调节块一侧,所述第二旋转块固定连接于所述调节块的另一端,所述第一旋转柱、所述第二旋转块均低于所述调节块的顶端面,所述第一旋转柱与所述第一旋转孔转动连接,第二旋转块与所述第二旋转孔转动连接,所述第二旋转块靠近所述舵机的一侧设有翻转孔,所述输出轴为输出螺母,所述翻转孔与所述输出螺母对应设置,通过所述第二旋转块、所述活动块实现所述调节块的水平翻转结构。
17.作为一种优选的实施方式,所述底座还设有限位面,用于限制所述支撑面的翻转角度。
18.本实用新型进一步考虑到旋翼失控的极端情况,若此时旋翼翻转的角度无相关限
制结构,翻转的角度无限接近90度及以上时,无人机飞行路线将变得杂乱无序,有坠机的风险,将给舵机的识别及控制进一步加大难度,对飞行杆中各种电机的走线也会带来各种问题,因此,本实用新型进一步增加了角度限位面的构思,将角度的翻转控制在可控范围内,即使出现短暂的失控时,无人机的飞行路线误差较小,并且可控,结合无人机控制算法的改进,本方案可以有效解决所述问题。
19.作为一种优选的实施方式,限位面与调节块翻转中心轴的距离范围为5
‑
20mm。
20.作为一种优选的实施方式,所述第一凸起靠近所述旋翼的一端设有弧面,用于适应所述旋翼的飞行和翻转。
21.作为一种优选的实施方式,所述第二凸起包括支部,所述支部突出并斜向上设置,所述支部用于实现所述舵机的竖直固定。
22.为实现舵机的竖直固定,在一种实施方式中,可以将舵机固定在飞行杆上,靠近所述调节支架设置,实现与调节块装置的转动连接即可,但是所述方式会带来舵机固定结构与调节支架结构不紧凑,对机身的飞行有一定的影响;因此,为克服所述不足,本实用新型进一步设计使调节支架与舵机安装固定实现一体化,突出并斜向上设置所述支部,进而在支部的顶端具有足够的空间固定舵机,突出并斜向上的设置可以较良好的适应倾斜设置的飞行杆结构,同时可以较好的后面舵机的垂直固定;垂直固定的舵机固定方式,可以更好地配合调节块的旋转。
23.作为一种优选的实施方式,所述舵机设有安装板,所述安装板设有安装孔,所述第二凸起设有对应所述安装孔的固定孔,通过螺钉连接将所述舵机固定连接在所述第二凸起,和/ 或,所述安装板设于所述支部斜向上的一端。
24.作为一种优选的实施方式,所述安装板设有内凹结构。
25.作为一种优选的实施方式,所述安装板设有翻转孔,用于实现所述输出轴与所述调节块的传动连接。
26.为实现舵机在支部的顶端上的固定,本实用新型进一步设计了一种可用于固定的安装板,设置了具有凸起和安装孔的固定板,以固定效果较佳、刚性连接较好的螺钉连接将舵机固定在安装板上,进一步通过翻转孔实现传动,在固定所述舵机的基础上,进一步实现舵机带动调节块及其旋翼等结构的翻转;为进一步加强舵机的固定强度及保护舵机前端输出轴部分的结构,设置了具有内凹的安装板,将舵机前端输出轴部分的结构嵌入内凹结构,结合螺钉连接的方式,加大了舵机固定的力度。
27.作为一种优选的实施方式,所述调节支架底部为具有第一开口的套筒结构,所述第一开口适应所述飞行杆设置。
28.作为一种优选的实施方式,所述套筒靠近所述旋翼的一侧设有调节缝,所述调节缝设有若干调节孔。
29.作为一种优选的实施方式,所述套筒设有第一定位孔,所述飞行杆设有对应所述第一定位孔的第二定位孔。
30.与现有技术相比,本实用新型的有益效果为:
31.1)通过设置调节支架及其具体结构,实现了将舵机、旋翼电机的驱动集成在飞行杆的一端,避免了飞行杆与机身连接的部位成为驱动连接的弱部,提高了舵机对旋翼结构控制的效率,有利于进一步对无人机控制系统的设计。
32.2)本实用新型通过活动块、转动块即实现了一种具有翻转效果的结构——限位面与调节块翻转中心轴的距离范围为5
‑
20mm,也实现了调节块在调节支架的活动安装及其调节。
附图说明
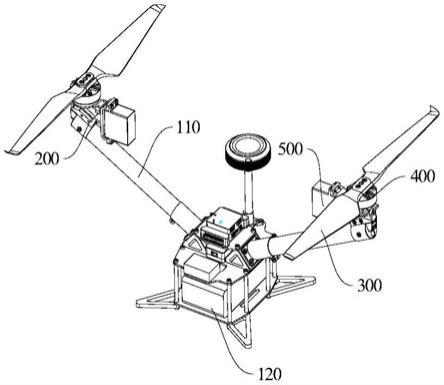
33.图1为本实用新型的一种舵机控制的双翼无人机的整体结构图。
34.图2为本实用新型的一种舵机控制的双翼无人机的飞行杆端部的结构图。
35.图3为本实用新型的一种舵机控制的双翼无人机的调节块的结构图。
36.图4为本实用新型的一种舵机控制的双翼无人机的输出轴连接示意图。
37.图5为本实用新型的一种舵机控制的双翼无人机的飞行杆端部的局部正视图。
38.图6为本实用新型的一种舵机控制的双翼无人机的正视图。
具体实施方式
39.本实用新型附图仅用于示例性说明,不能理解为对本实用新型的限制。为了更好说明以下实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
40.实施例1
41.如图1所示,一种舵机控制的双翼无人机,包括机身、舵机500,所述机身的两侧对称固定有两个飞行杆110,所述飞行杆110斜向上设置,所述飞行杆110远离所述机身的一端活动连接有旋翼电机400,用于带动所述旋翼300的转动,所述飞行杆110远离所述机身的一端还设置有舵机500,用于控制所述旋翼电机400及其旋翼300的翻转,所述飞行杆110 远离所述机身的一端固定连接有调节支架200,所述舵机500通过所述调节支架200控制所述旋翼电机400及其旋翼300的翻转,
42.当所述旋翼电机400启动时,所述旋翼300受所述旋翼电机400驱动带动所述机身升降或左右转向,当所述舵机500启动时,所述舵机500驱动所述旋翼电机400和所述旋翼300 使其翻转一定角度,结合所述旋翼电机400的驱动,进一步实现所述机身的俯仰转向。
43.本实用新型在设计舵机500的控制方式时,考虑了飞行杆110与舵机500控制的相应关系,创造性地将舵机500设置在飞行末端,即飞行杆110远离所述机身的一端,从而可以保证飞行杆110起始端与机身固定连接,具体可以是刚性连接,增加无人机自身的飞行稳定性;同时,通过设置一种调节支架200,这种调节支架200与飞行杆110末端固定连接,则可以总共可以看成是无人机中飞行杆110上的两处固定连接点,减少飞行杆110对电机或者舵机 500控制的影响;通过在调节支架200上设置安装旋翼300及其旋翼电机400,由同样安装在飞行杆110末端的舵机500控制旋翼300及其旋翼电机400的翻转,从而可以实现旋翼300 的控制端均位于飞行杆110上的同一端,使得舵机500驱动的力臂最小化,减少舵机500的能耗,也有利于后续对无人机控制系统的设计。
44.如图2所示,作为一种优选的实施方式,所述调节支架200设有调节块210、竖直部,所述调节块210转动连接所述竖直部,用于提供可旋转的水平支撑面,所述旋翼电机400与所述水平支撑面固定连接,用于旋转支撑所述旋翼电机400,所述舵机500具有输出轴510,所述调节块210连接所述输出轴510,用于带动所述水平支撑面的翻转。
45.为实现调节支架200与旋翼300及其旋翼电机400的连接,本实用新型设计的调节块210 与竖直部转动连接时,提供了一个水平支撑面,所述水平支撑面中的“水平”,包括一水平支撑轴,即旋翼电机400的支撑包括但不限于水平方向上的支撑,即本实用新型限定的水平支撑面是基于所述水平支撑轴上可翻转的面,并且,通过输出轴510与调节块210的固定连接,提供一种具体的舵机500带动旋翼300翻转的结构,其中,舵机500与调节支架200的设计在本方案中,可以是舵机500直接固定在飞行杆110的中途部靠近调节支架200的部分,也可以是将舵机500设置在调节支架200上,最后均固定连接调节块210的一端用于带动调节块210的转动即可。
46.作为一种优选的实施方式,所述竖直部包括第一凸起220、第二凸起230,所述第一凸起 220与所述第二凸起230分别转动连接所述调节块210,所述调节支架200还设有底座240,所述底座240与所述第一凸起220与所述第二凸起230固定连接,所述底座240的下侧与所述飞行杆110远离所述机身的一端刚性连接。
47.为实现调节块210的可翻转,本实用新型进一步限定竖直部的结构,为两个均与调节块 210转动连接的凸起,将旋翼300结构悬空于所述飞行杆110并转动支撑于调节支架200,用于实现旋翼300转动,同时,本实用新型还进一步限定于飞行杆110固定连接的底座240结构,通过底座240与飞行杆110的刚性连接,将旋翼300的驱动部位集中限制于飞行杆110 远离机身的一端,克服了飞行杆110做为驱动力臂的可能。
48.如图3、4所示,进一步的,所述第一凸起220设有第一旋转孔,所述第二凸起230设有第二旋转孔,所述调节块210分别与所述第一旋转孔、所述第二旋转孔活动连接。
49.作为一种优选的实施方式,所述调节支架200的第一凸起220为拆卸安装的活动块,所述活动块设有若干第一螺纹孔,所述底座240设有对应所述第一螺纹孔的第二螺纹孔及用于活动块安装限位的安装槽,实现所述活动块与所述调节支架200的固定连接。
50.进一步的,为实现舵机500与调节块210的转动传动连接,所述调节块210设有第一旋转柱211、第二旋转块212,所述第一旋转柱211设于所述调节块210一侧,所述第二旋转块212固定连接于所述调节块210的另一端,所述第一旋转柱211、所述第二旋转块212均低于所述调节块210的顶端面,所述第一旋转柱211与所述第一旋转孔转动连接,第二旋转块212与所述第二旋转孔转动连接,所述第二旋转块靠近所述舵机500的一侧设有翻转孔,所述输出轴510为输出螺母,所述翻转孔与所述输出螺母对应设置,通过所述第二旋转块212、所述活动块实现所述调节块210的水平翻转结构。
51.如图5所示,作为一种优选的实施方式,所述底座240还设有限位面241,用于限制所述支撑面的翻转角度。
52.本实用新型进一步考虑到旋翼300失控的极端情况,若此时旋翼300翻转的角度无相关限制结构,翻转的角度无限接近90度及以上时,无人机飞行路线将变得杂乱无序,有坠机的风险,将给舵机500的识别及控制进一步加大难度,对飞行杆110中各种电机的走线也会带来各种问题,因此,本实用新型进一步增加了角度限位面241的构思,将角度的翻转控制在可控范围内,即使出现短暂的失控时,无人机的飞行路线误差较小,并且可控,结合无人机控制算法的改进,本方案可以有效解决所述问题。
53.作为一种优选的实施方式,限位面241与调节块210翻转中心轴的距离范围为5
‑
20mm。
54.作为一种优选的实施方式,所述第一凸起220靠近所述旋翼300的一端设有弧面,用于适应所述旋翼300的飞行和翻转。
55.作为一种优选的实施方式,所述第二凸起230包括支部,所述支部突出并斜向上设置,所述支部用于实现所述舵机500的竖直固定。
56.为实现舵机500的竖直固定,在一种实施方式中,可以将舵机500固定在飞行杆110上,靠近所述调节支架200设置,实现与调节块210装置的转动连接即可,但是所述方式会带来舵机500固定结构与调节支架200结构不紧凑,对机身的飞行有一定的影响;因此,为克服所述不足,本实用新型进一步设计使调节支架200与舵机500安装固定实现一体化,突出并斜向上设置所述支部,进而在支部的顶端具有足够的空间固定舵机500,突出并斜向上的设置可以较良好的适应倾斜设置的飞行杆110结构,同时可以较好的后面舵机500的垂直固定;垂直固定的舵机500固定方式,可以更好地配合调节块210的旋转。
57.作为一种优选的实施方式,所述舵机500设有安装板,所述安装板设有安装孔,所述第二凸起230设有对应所述安装孔的固定孔,通过螺钉连接将所述舵机500固定连接在所述第二凸起230,和/或,所述安装板设于所述支部斜向上的一端。
58.作为一种优选的实施方式,所述安装板设有内凹结构。
59.作为一种优选的实施方式,所述安装板设有翻转孔,用于实现所述输出轴510与所述调节块210的传动连接。
60.为实现舵机500在支部的顶端上的固定,本实用新型进一步设计了一种可用于固定的安装板,设置了具有凸起和安装孔的固定板,以固定效果较佳、刚性连接较好的螺钉连接将舵机500固定在安装板上,进一步通过翻转孔实现传动,在固定所述舵机500的基础上,进一步实现舵机500带动调节块210及其旋翼300等结构的翻转;为进一步加强舵机500的固定强度及保护舵机500前端输出轴510部分的结构,设置了具有内凹的安装板,将舵机500前端输出轴510部分的结构嵌入内凹结构,结合螺钉连接的方式,加大了舵机500固定的力度。
61.作为一种优选的实施方式,所述调节支架200底部为具有第一开口的套筒结构,所述第一开口适应所述飞行杆110设置。
62.作为一种优选的实施方式,所述套筒靠近所述旋翼300的一侧设有调节缝,所述调节缝设有若干调节孔。
63.作为一种优选的实施方式,所述套筒设有第一定位孔,所述飞行杆110端部设有对应所述第一定位孔的第二定位孔。
64.如图6所示,作为一种优选的实施方式,所述机身还包括电源600、定位仪700,所述无人机设有控制系统,所述电源600沿所述飞行杆110给所述舵机500、所述旋翼电机400供电,所述电源600设于所述机身内侧,所述机身设有与所述电源600连接的所述定位仪700,所述定位仪700还与所述控制系统无线连接,用于传递所述无人机的三维位置信息给所述控制系统。
65.示例性地,本实用新型产品在飞行杆110端部的安装为:首选将旋翼电机400与旋翼300 装配在调节块210上,再将底座240的套筒结构嵌入飞行杆110,通过第一定位孔、第二定位孔的配合将底座240固定在飞行杆110的端部,通过调节孔的配合调节或者加固底座与飞行杆的连接;通过安装板的结构,将舵机500及其输出轴510固定安装于调节支架200的一侧,通过在安装板的翻转孔使输出轴510连接第二旋转块212,将第一凸起220的第一旋转
孔对齐调节块210的第一旋转柱,将旋翼300、旋翼电机400、调节块210、第一凸起220形成的结合结构置于底座240上方,将调节块210固定在第二旋转块212,使第一凸起220固定在底座240的安装槽,完成飞行杆110端部结构的安装。
66.所述的各种孔的“配合”包括螺钉与孔配合的方式。
67.本实用新型具有如下有益效果:
68.1)通过设置调节支架200及其具体结构,实现了将舵机500、旋翼电机400的驱动集成在飞行杆110的一端,避免了飞行杆110与机身连接的部位成为驱动连接的弱部,提高了舵机500对旋翼300结构控制的效率,有利于进一步对无人机控制系统的设计。
69.2)本实用新型通过活动块、转动块即实现了一种具有翻转效果的结构——限位面241 与调节块210翻转中心轴的距离范围为5
‑
20mm,也实现了调节块210在调节支架200的活动安装及其调节。
70.显然,本实用新型的所述实施例仅仅是为清楚地说明本实用新型技术方案所作的举例,而并非是对本实用新型的具体实施方式的限定。凡在本实用新型权利要求书的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

