喷出系统、喷出装置、无人飞机、操纵系统及气胶容器
【技术领域】
1.本发明关于一种喷出系统、喷出装置、无人飞机、操纵系统及气胶容器。
背景技术:
2.先前,已知一种无人飞机,其具备流体喷射喷嘴(参阅例如专利文献1)。专利文献1:日本特开2019
‑
18589号公报
技术实现要素:
[发明所要解决的问题]
[0003]
以往搭载液体物的无人飞机无法禁止其液体喷洒于非预期的对象上。[解决问题的技术手段]
[0004]
在本发明的第一实施方式中,提供一种喷出(吐出)系统,具备:容器保持部,其保持容器;喷出驱动部,其使内容物自容器喷出;容器信息取得部,其读取已附加于容器上的容器信息;许可信息处理部,其处理容器信息,并取得许可信息;及,喷出管制部,其根据许可信息,进行喷出驱动部中的喷出的限制或解除。
[0005]
容器可为气胶容器(喷雾剂容器)。
[0006]
喷出管制部,可用于管制许可信息中包含的位置的信息。
[0007]
喷出管制部,可用于管制许可信息中包含的期间的信息。
[0008]
喷出管制部,可用于管制许可信息中包含的气胶容器的用户的信息。
[0009]
喷出管制部,可用于管制许可信息中包含的气胶容器的利用期限的信息。
[0010]
喷出管制部,可用于管制许可信息中包含的气胶容器的剩余量的信息。
[0011]
容器信息可包含密码钥,该密码钥用于解密经加密的许可信息。
[0012]
容器信息可包含用于计算机的认证信息,该认证信息在取得已保存于计算机上的许可信息时为必需。
[0013]
容器信息可包含可识别气胶容器的个体的识别信息。
[0014]
容器信息可包含许可信息。
[0015]
容器信息,可利用可藉由视觉手段读取的方法而被附加于气胶容器的外表面上。
[0016]
容器信息,可在气胶容器的外周方向上隔开间隔地配置复数个,且在轴向上配置于相等的位置。
[0017]
容器信息可设于气胶容器的外表面上,并被附加于可藉由电气通讯读取的半导体组件上。
[0018]
容器信息取得部可设于容器保持部。
[0019]
容器信息取得部可藉由无线通信来取得容器信息。
[0020]
许可信息处理部可处理容器信息取得部所取得的容器信息。许可信息处理部可自容器信息取得许可信息。许可信息处理部可将许可信息传送至喷出管制部。
[0021]
许可信息处理部,可具备与设于外部的计算机进行通讯的手段。许可信息处理部
可自计算机取得包含许可信息的信息。
[0022]
许可信息处理部,可具备与设于外部的计算机进行通讯的手段。许可信息处理部可更新许可信息的内容。
[0023]
在本发明的第二实施方式中,提供一种气胶容器的喷出装置,其具备喷出系统。
[0024]
在本发明的第三实施方式中,提供一种无人飞机,其可搭载气胶容器,该无人飞机具备喷出系统。
[0025]
在本发明的第四实施方式中,提供一种无人飞机的操纵系统,具备:无人飞机;及,该无人飞机的附带设备。
[0026]
在本发明的第五实施方式中,提供一种气胶容器,其附加有对许可信息的取得处理为必需的容器信息,其中,容器信息被可解除的隐藏手段所隐藏。
[0027]
隐藏手段可藉由可剥离的涂装来设置。
[0028]
隐藏手段可为可剥离的封条。
[0029]
隐藏手段可为无线通信的通讯干扰装置。
[0030]
另外,上述发明的概要,并未列出本发明的全部特征。又,该些特征组的子组合亦可成为发明。
【附图说明】
[0031]
图1a表示无人飞机100的正面图的一例。图1b表示图1a的无人飞机100的左侧视图的一例。图2a表示无人飞机100的正面图的另一例。图2b表示图2a的无人飞机100的左侧视图。图3a表示容器保持部40的构成的一例。图3b表示附加有复数个容器信息90的容器60的构成的一例。图4a表示在底面上附加有容器信息90的容器60的构造的一例。图4b表示容器保持部40的构成的一例。图5表示无人飞机100的操纵系统300的一例。图6表示喷出系统400的构成的一例。图7表示喷出管制部93所取得的比较信息i
c
的一例。图8a表示喷出系统400的动作方法的一例。图8b表示喷出系统400的动作方法的一例。图8c表示喷出系统400的动作方法的一例。图9表示管理容器60的剩余量的喷出系统400的一例。图10a表示具有对应于无线通信的容器信息90的容器60的一例。图10b表示具有对应于接触式通讯的容器信息90的容器60的一例。图11a表示隐藏容器信息90的隐藏手段95的一例。图11b表示解除容器信息90的隐藏后的隐藏手段95的一例。图12a表示喷出装置500的剖面图的一例。图12b表示喷出装置500的侧视图的一例。
【具体实施方式】
[0032]
以下,通过发明的实施方式来说明本发明,但是以下的实施方式并不对申请专利范围的本发明加以限定。又,发明的解决手段中并不一定需要实施方式中所说明的特征的全部组合。
[0033]
图1a表示无人飞机100的正面图的一例。图1b表示图1a的无人飞机100的左侧视图的一例。
[0034]
无人飞机100,是在空中飞行的飞行体。本例的无人飞机100具备:本体部10、推进部20、可动摄影机30、容器保持部40及喷出部50。另外,本说明书中是将本体部10中的设置有固定摄影机12的面称作无人飞机100的正面,但飞行方向并不限定于正面方向。
[0035]
本体部10,容纳有无人飞机100的各种控制电路和电源等。又,本体部10,可作为连结无人飞机100的构成彼此的结构体来发挥功能。本例的本体部10,连结至推进部20。本例的本体部10,具备固定摄影机12。
[0036]
固定摄影机12,设于本体部10的侧面。固定摄影机12,对无人飞机100的正面加以拍摄。在一例中,由固定摄影机12拍摄下的影像被传送至无人飞机100的终端装置。无人飞机100的操纵者,可基于固定摄影机12所拍摄的影像来操作无人飞机100。又,无人飞机100的操纵者亦可直接看着无人航空机100进行操纵。
[0037]
推进部20,使无人飞机100推进。推进部20,具有旋转翼21和旋转驱动部22。本例的无人飞机100,具备4个推进部20。推进部20经由腕部24而被安装于本体部10。另外,无人飞机100亦可为具备固定翼的飞行体。
[0038]
推进部20,藉由使旋转翼21旋转而获得推进力。旋转翼21,以本体部10为中心而设置有4个,但旋转翼21的配置方法并不限定于本例。旋转翼21,经由旋转驱动部22而设于腕部24的前端。
[0039]
旋转驱动部22,具有马达等动力源来驱动旋转翼21。旋转驱动部22,可具有旋转翼21的制动机构。旋转翼21和旋转驱动部22,亦可省略腕部24而直接安装于本体部10。
[0040]
腕部24,自本体部10以放射状的方式延伸设置。本例的无人飞机100,具备与4个推进部20对应设置的4个腕部24。腕部24,可为固定式亦可为可动式。腕部24,可固定有摄影机等的其他构成。
[0041]
可动摄影机30,对无人飞机100的周围的影像加以摄影。本例的可动摄影机30,被设在本体部10的下方。在一例中,所谓下方是指相对于本体部10与设有旋转翼21的一侧相反的侧。可动摄影机30,与本体部10上所设置的固定摄影机12拍摄不同区域的影像。例如,可动摄影机30,为了控制自喷出部50的喷出,而取得比固定摄影机12更狭窄的区域的影像。又,可动摄影机30,在固定摄影机12是对行进方向实行摄影时,可对喷出部50的喷出方向的影像进行摄影。
[0042]
本例的无人飞机100具备操纵用的固定摄影机12和喷出控制用的可动摄影机30,藉此使操纵者的操作变得容易。由于无需切换操纵用的操作画面与喷出控制用的操作画面,因此,能够防止操纵者的混乱。又,能够一边进行喷出控制一边轻易地掌握无人飞机100的周围状况。
[0043]
连结部32,连结本体部10与可动摄影机30。连结部32,可为固定式亦可为可动式。连结部32,可为用来在3轴方向控制可动摄影机30的位置的平衡环架(gimbal)。连结部32,
可配合喷出部50的喷出方向来控制可动摄影机30所朝向的方向。
[0044]
容器保持部40,保持后述的容器60,该容器60保存有内容物。容器保持部40,经由连结部42连接至本体部10。容器保持部40,亦可连接于腕部24或脚部15等的本体部10以外的构件。在一例中,容器保持部40,是容纳容器60的筒状套筒。
[0045]
容器保持部40的材料,只要是能够将容纳容器60的容纳部的形状加以保持的材料即可,并无特别限制。例如,容器保持部40的材料,包括铝等金属、塑料、或碳纤维等高强度且轻量的素材。又,容器保持部40的材料并不限定于硬质的材料,亦可包括软质的材料,例如,硅氧橡胶或聚胺基甲酸酯发泡体等的橡胶材料。另外,容器保持部40,亦可具备用来对容器60进行加热或保温的加热机构。
[0046]
连结部42,连结本体部10与容器保持部40。连结部42,可为固定式亦可为可动式。连结部42,可为用来在3轴方向控制容器保持部40的位置的平衡环架。在一例中,连结部42藉由移动容器保持部40的位置来调整喷出部50的喷出方向。此外,藉由将链接部42的规格加以统一,能够交换成可与容器60配合的任意的容器保持部40。藉此,能够与尺寸或种类不同的容器60对应。
[0047]
喷出部50,与容器60连接并喷出容器60的内容物。内容物亦可为液体、气体或固体中的任一者。内容物,亦可为粉状、粒状或胶状等的任一状态。喷出部50是用于喷出内容物的喷嘴的一例。喷出部50具有用于喷出容器60的内容物的喷出口51。
[0048]
脚部15,连接于本体部10,在着陆时保持无人飞机100的姿势。脚部15在使推进部20停止的状态下,保持无人飞机100的姿势。本例的无人飞机100具有2只脚部15。脚部15上亦可安装有可动摄影机30或容器保持部40。
[0049]
图2a表示无人飞机100的正面图的另一例。图2b表示图2a的无人飞机100的左侧视图。本例的无人飞机100,与图1a和图1b的实施例不同的点在于,具备复数个容器保持部40。本例中,针对与图1a和图1b的实施例不同的点特别加以说明。
[0050]
复数个容器保持部40,分别具备容器60。复数个容器保持部40,可具有相同种类的容器60,亦可分别具有不同种类的容器60。本例的无人飞机100具备3个容器保持部40,但并不限定于这样的型态。复数个容器保持部40,安装于脚部15上。复数个容器保持部40,可安装于相同的脚部15上,亦可安装于不同的脚部15上。
[0051]
喷出部50,针对复数个容器60加以共通地设置同。但是,喷出部50,亦可针对复数个容器60个别地加以设置。本例的喷出部50,藉由连结部42连结至本体部10。喷出部50,亦可藉由链接部42来调整位置。喷出部50,藉由自容器60延伸设置的延伸部52来与容器60连接。
[0052]
延伸部52,设置成自容器保持部40的容器60延伸到喷出部50。藉此,延伸部52能够将喷出部50配置在自容器保持部40分离的任意位置。据此,提高了无人飞机100的布局的自由度。又,藉由将喷出部50安装于平衡环架上,容易对喷出方向进行遥控。延伸部52的个数可对应容器保持部40的个数来设置。本例的延伸部52是相对于3个容器保持部40各设置了1个。喷出部50,亦可藉由时间分割的方式自复数个容器60中选择任一者来加以喷出,亦可同时自复数个容器60加以喷出。
[0053]
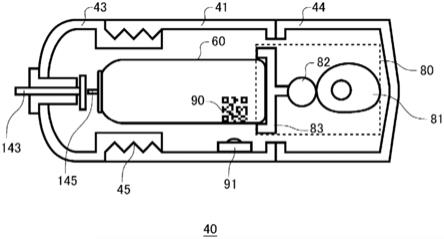
图3a表示容器保持部40的构成的一例。图3a表示容器保持部40的剖面图。容器保持部40,对容器60加以保持。本例的容器保持部40具备:本体41、第1端盖部43及第2端盖部
44。又,容器保持部40具备喷出驱动部80,该喷出驱动部80用来控制自容器60的喷出。
[0054]
容器60可为气胶容器,该气胶容器将填充于内部的内容物藉由气压喷出。例如,容器60藉由填充于内部的液化气或压缩气的气压喷出内容物。本例的容器60为金属制的气胶罐。容器60可为具有耐压性的塑料容器。容器60以容纳于容器保持部40的状态被搭载。容器60并不限定于气胶容器,亦可为树脂罐。
[0055]
另外,作为喷射剂,可使用碳氢化合物(液化石油气)(lpg)、二甲醚(dme)、氢氟烯烃(hfo
‑
1234ze)等的液化气体;及,二氧化碳(co2)、氮气(n2)、一氧化二氮(n2o)等的压缩气体。
[0056]
本体41,具有比容器60更大口径的圆柱状形状。本例的本体41,被第1端盖部43和第2端盖部44夹住。
[0057]
第1端盖部43,覆盖本体41的其中一方的端部。本例的第1端盖部43,覆盖容器60的喷射侧的端部。第1端盖部43,相对于本体41以可经由螺纹部45来拆装的方式螺入固定。本例的第1端盖部43,具有圆顶状的盖本体。第1端盖部43,考虑到气动力特性而以直径朝向前端逐渐缩小的方式被加以缩径。第1端盖部43,其前端具有圆滑的圆锥状或圆顶状的曲面。如此一来,具有气动特性良好的形状,藉此,侧风的影响减少,可实现飞行的稳定性。
[0058]
第2端盖部44,在本体41中,覆盖第1端盖部43所覆盖的端部的另一方的端部。本例的第2端盖部44,覆盖容器60的喷射侧的相反侧的端部。第2端盖部44,与本体41一体地构成。又,第2端盖部44,亦可被设置成可自本体41拆卸。
[0059]
喷出驱动部80,使内容物自容器60喷出。喷出驱动部80,被容纳在位于容器60的底部侧的第2端盖部44。第2端盖部44,作为喷出驱动部80的框体来发挥功能。喷出驱动部80具备:凸轮81、凸轮从动件82及可动板83。因为喷出驱动部80设于容器保持部40中,所以在交换容器60时不需要交换喷出驱动部80。
[0060]
凸轮81,藉由驱动源而被旋转驱动。在一例中,使用马达来作为驱动源。凸轮81,具有自旋转中心至外周为止的距离不同的构造。此外,在图示的例子中,凸轮81的形状被加以夸饰。凸轮81,在外周,与凸轮从动件82接触。
[0061]
凸轮从动件82,设于凸轮81与可动板83之间。凸轮从动件82,连接于凸轮81和可动板83,将凸轮81的旋转运动转换成直线运动并传达至可动板83。
[0062]
可动板83,被设置为与容器60的底面相接,并控制容器60的阀口的开闭。可动板83,藉由凸轮从动件82而前后移动。例如,当凸轮81的旋转中心与凸轮从动件82所抵接的凸轮81的接触区域的距离较短时,可动板83相对于容器60后退而使容器60的阀口关闭。另一方面,当凸轮81的旋转中心与凸轮从动件82所抵接的凸轮81的接触区域的距离较长时,可动板83相对于容器60前进而使容器60的阀口开启。
[0063]
此外,喷出驱动部80,虽然具有藉由凸轮机构来将马达的旋转运动转换成直线运动的构成,但并不限定于凸轮机构。例如,喷出驱动部80的机构,可具有螺旋进给机构、齿条
‑
齿轮(rack and pinion)等将马达的旋转运动转换成直线运动的机构。又,作为驱动源,可具备直线驱动用的线性马达或电磁螺线管(electromagnetic solenoid)等而非旋转马达。
[0064]
阀杆145,设于容器60上。藉由利用致动器143来推压阀杆145,便可自容器60喷出内容物。致动器143,具有与喷出方向和喷出形态相应的流路。在一例中,致动器143将内容
物形成雾状来喷出。
[0065]
容器信息90被附加于容器60上。容器60中,附加有一个容器信息90。容器信息90以可读取的方法附加于容器60的外表面上。例如,容器信息90藉由字符数字符串、一维条形码、二维条形码、可译码代码的图像信息(电子水印)、全息图、rf卷标或nfc卷标中的至少一种方法而被附加于容器60上,在一例中,容器信息90以贴纸的黏贴、收缩卷标的装设、雷射标记或ijp(喷墨印刷)来绘制。容器信息90可藉由容器60的空罐制造商或内容物的填充业者附加于容器60上。容器信息90包括可识别容器60的个体的识别信息i
i
。
[0066]
识别信息i
i
与用于特定容器60的个体的信息关联。例如,识别信息i
i
与关于各容器60的制造时期、制造场所、内容物的信息等关联。又,识别信息i
i
可包含个体标识符。识别信息i
i
亦可包含使用了随机的字符数字符串而编号的个体标识符。随机的字符数字符串可使用哈希值(hash value)或随机数表进行编号。
[0067]
又,识别信息i
i
亦可包含促销用活动码。例如,促销用活动码包含关于容器60的由销售商实施的促销用的活动的信息。识别信息i
i
向无人飞机100的用户提供有用的信息。例如,当搭载于无人飞机100上的容器60用于农药的喷洒时,识别信息i
i
包含关于农业的信息的网址。关于农业的信息中可包含:填充于容器60内的农药的喷洒时期、喷洒量、或农作物相关知识等信息。
[0068]
容器信息取得部91读取已附加于容器60上的容器信息90。容器信息取得部91安装于无人飞机100的任意位置。本例的容器信息取得部91,在容器保持部40中,设于与容器60的侧面相对向的位置。本例的容器信息取得部91是藉由视觉手段来读取容器信息90的摄影机。另外,容器信息取得部91可设于无人飞机100的机体,并藉由无线通信来读取容器信息90。
[0069]
另外,在本例中,容器60直接搭载于容器保持部40,但容器60亦可被容纳部件收纳,并将收纳构件搭载于容器保持部40。此时,容器信息90可附加于容纳容器60的容纳构件。又,由于容纳构件保护容器60免受撞击,因此,事故时的安全性提高。
[0070]
本例的容器60由于为气胶容器,因此,即便容器60变空,仅搭载新的容器60即可轻松更换。又,内容物难以附着在人体上且更换时的安全性较高。另外,无人飞机100亦可藉由可否取得容器信息90,来判断是否搭载有容器60。
[0071]
图3b表示附加有复数个容器信息90的容器60的构成的一例。在本例中,针对不同于图3a的容器60的方面,加以特别说明。
[0072]
复数个容器信息90并列配置于容器60的外周方向。复数个容器信息90在容器60的外周方向上隔开间隔地配置复数个,且在轴向上配置于相等的位置。例如,在容器60的外周,复数个容器信息90隔开90度的间隔地设置有4个。藉此,容器60即便在容器保持部40的内部朝外周方向旋转时,仍能够利用容器信息取得部91来取得容器信息90。又,无需担心容器60插入至容器保持部40中的方向。
[0073]
图4a表示在底面上附加有容器信息90的容器60的构成的一例。容器信息90设于容器60的底面。在本例中,针对不同于图3a的容器60的方面,加以特别说明。另外,容器信息90亦可如图3a或图3b所示般,设于容器60的侧面。
[0074]
图4b表示容器保持部40的构成的一例。本例的容器保持部40如图4a所示般,读取设于容器60的底面的容器信息90。
[0075]
容器信息取得部91,在容器保持部40中,设为与容器60的底面相对向。本例的容器信息取得部91,设于可动板83上的与容器60的底面相对向的一侧。容器信息取得部91,藉由将容器信息90设于容器60的底面,即便由于喷出驱动部80而导致容器60的位置移动时,仍可取得容器信息90。又,即便当容器60在容器保持部40内旋转时,容器信息取得部91仍可取得容器信息90。使用者无需关注容器60的朝向,可将其搭载于容器保持部40。由于容器信息90不醒目,因此,容器60的设计性也得以提升。
[0076]
图5表示无人飞机100的操纵系统300的一例。本例的操纵系统300具备无人飞机100及终端装置200。终端装置200包含显示部210及控制器220。
[0077]
显示部210显示已搭载于无人飞机100上的摄影机所拍摄下的影像。显示部210亦可显示固定摄影机12及可动摄影机30分别所拍摄下的影像。例如,显示部210将固定摄影机12及可动摄影机30的影像以分割的画面分割。显示部210可直接与无人飞机100进行通讯,亦可经由控制器220间接地与无人飞机100进行通讯。显示部210,亦可与外部的服务器连接。
[0078]
控制器220,由使用者进行操作来操纵无人飞机100。控制器220,除了无人飞机100的飞行之外,亦可指示藉由喷出部50进行内容物的喷出。控制器220,可藉由有线或无线方式来与显示部210连接。亦可设有复数个控制器220,以分别用于无人飞机100的操纵用与喷出部50的喷出控制用。
[0079]
再者,本例的用户是使用终端装置200以手动的方式操纵无人飞机100。其中,用户亦可利用程序来自动操纵,而非手动。又,使用者亦可直接目视无人飞机100来进行操纵,而不使用被显示在显示部210上的画面。又,亦可自动控制无人飞机100的操纵,并且以手动方式来操作喷出装置500的喷出。
[0080]
图6表示喷出系统400的构成的一例。喷出系统400具备:容器保持部40、喷出驱动部80、容器信息取得部91、许可信息处理部92、及喷出管制部93。
[0081]
容器信息取得部91读取已附加于容器60上的容器信息90。容器信息取得部91可设于容器保持部40,亦可设于无人飞机100的机体。容器信息取得部91向许可信息处理部92发送容器信息90。
[0082]
许可信息处理部92处理容器信息90,取得许可信息i
p
。许可信息i
p
是用于许可来自喷出部50的喷出的信息。本例的许可信息处理部92,与设于无人飞机100的外部的计算机250进行通讯。在一例中,许可信息处理部92将所取得的容器信息90传送至计算机250,并自计算机250取得许可信息i
p
。
[0083]
计算机250具有与容器信息90相应的许可信息i
p
。在一例中,计算机250是包含许可信息i
p
的数据库的服务器,将与容器信息90相应的许可信息i
p
传送至许可信息处理部92。另外,计算机250,自信息保护的观点而言,亦可为复数个。例如,计算机250包含罐头制造公司的数据库、填充公司的数据库、建筑公司的数据库或省政府、政府的许可数据库的至少一个。
[0084]
喷出管制部93自许可信息处理部92取得许可信息i
p
。喷出管制部93根据许可信息i
p
来进行喷出部50中的喷出的限制或解除。例如,喷出管制部93取得用于与目前位置信息等的许可信息i
p
进行比较的比较信息i
c
。喷出管制部93将许可信息i
p
与比较信息i
c
进行比较,当满足许可信息i
p
的条件时,许可喷出。当满足许可信息i
p
的条件时,喷出管制部93使喷
出驱动部80驱动而许可自容器60喷出内容物的喷出命令;另一方面,当不满足许可信息i
p
的条件时,喷出管制部93拒绝喷出命令,限制喷出。
[0085]
例如,许可信息i
p
包含关于喷出被许可的区域的信息。此时,喷出管制部93取得无人飞机100的目前位置信息,作为比较信息i
c
。当位于无人飞机100的喷出被许可的区域时,喷出管制部93许可喷出。另一方面,喷出管制部93在喷出被许可的区域以外的区域,限制喷出。
[0086]
又,许可信息i
p
可包含容器60的用户的信息。喷出管制部93用于管制容器60的用户的信息。当无人飞机100的用户满足许可信息i
p
所包含的用户的条件时,喷出管制部93许可喷出。
[0087]
又,许可信息i
p
亦可包含容器60的利用期限的信息。喷出管制部93用于管制容器60的利用期限的信息。当容器60的利用期限满足许可信息i
p
所包含的利用期限时,喷出管制部93许可喷出。另外,当接收复数个条件作为许可信息i
p
时,条件中的任一者为不许可喷出时,喷出管制部93可限制喷出。
[0088]
图7表示喷出管制部93所取得的比较信息i
c
的一例。喷出管制部93将许可信息i
p
与比较信息i
c
进行比较,并决定是否许可喷出。
[0089]
喷出管制部93,自无人飞机100、喷出装置500或终端装置200中的任一者取得比较信息i
c
。又,喷出管制部9亦可具有自已产生比较信息i
c
的功能。
[0090]
无人飞机100取得关于无人飞机100的位置的信息。位置的信息可包含gps信息或高度信息。在一例中,无人飞机100自飞行控制器等飞行控制部取得位置的信息。无人飞机100将取得的信息作为比较信息i
c
传送至喷出管制部93。当来自无人飞机100的比较信息i
c
满足许可信息i
p
所包含的条件时,喷出管制部93许可喷出。当来自无人飞机100的比较信息i
c
不满足许可信息i
p
所包含的条件时,喷出管制部93限制喷出。如此一来,喷出管制部93可用于管制许可信息i
p
所包含的位置的信息。
[0091]
喷出装置500取得关于容器60的剩余量的信息。在一例中,喷出装置500基于容器60的容量与总喷出时间,取得容器60的剩余量。喷出装置500将取得的信息作为比较信息i
c
传送至喷出管制部93。当容器60的剩余量满足许可信息i
p
所包含的条件时,喷出管制部93许可喷出。当容器60的剩余量不满足许可信息i
p
所包含的条件时,喷出管制部93限制喷出。如此一来,喷出管制部93可用于管制许可信息i
p
所包含的容器60的剩余量的信息。由此,例如,可防止恶意者在空的容器60中填充有害的内容物并滥用。
[0092]
终端装置200取得关于用户的信息。终端装置200将取得的信息作为比较信息i
c
传送至喷出管制部93。当关于用户的信息符合许可信息i
p
所包含的条件时,喷出管制部93许可喷出。当关于用户的信息不满足许可信息i
p
所包含的条件时,喷出管制部93限制喷出。如此一来,喷出管制部93亦可用于管制许可信息i
p
所包含的容器60的用户的信息。
[0093]
喷出管制部93亦可内置取得目前时刻或目前日期的功能。此时,喷出管制部93用于管制许可信息i
p
所包含的期间的信息。又,喷出管制部93亦可用于管制许可信息i
p
所包含的容器60的利用期限的信息。
[0094]
图8a表示喷出系统400的动作方法的一例。在本例中,表示使用了密码钥i
k
的喷出系统400的动作方法的一例。
[0095]
容器信息90包含可识别容器60的个体的识别信息i
i
。识别信息i
i
对于各容器60的
个体为不同。容器信息90包含用于将经加密的许可信息i
p
加以解密的密码钥i
k
。藉由具有密码钥i
k
,可解密对应于该密码钥i
k
的容器60的许可信息i
p
。
[0096]
容器信息取得部91自容器信息90取得识别信息i
i
及密码钥i
k
。容器信息取得部91将取得的识别信息i
i
及密码钥i
k
传送至许可信息处理部92。
[0097]
许可信息处理部92将识别信息i
i
传送至计算机250。计算机250将与接收到的识别信息i
i
相应的许可信息i
p
传送至许可信息处理部92。许可信息i
p
由于已被加密,因此,即便被恶意者600取得亦无法解读。并且,许可信息处理部92利用密码钥i
k
解锁经加密的许可信息i
p
,以取得许可信息i
p
。许可信息处理部92将经解密的许可信息i
p
传送至喷出管制部93。
[0098]
本例的喷出系统400对容器信息90设置密码钥i
k
,并将许可信息i
p
加密,藉此,防止许可信息i
p
泄漏至恶意者600。因此,可更安全地取得对应于容器60的识别信息i
i
的许可信息i
p
。
[0099]
另外,许可信息处理部92可使用lte(长期演进技术)线路等来直接与计算机250通讯,亦可经由终端装置200来与计算机250通讯。无人飞机100亦可利用暂时缓存的数据库的信息。藉此,无人飞机100即便在例如山区或海上这样的难以与外部通讯的状况下,仍可动作。
[0100]
图8b表示喷出系统400的动作方法的一例。在本例中,表示使用认证信息i
a
的喷出系统400的动作方法的一例。
[0101]
容器信息90包含识别信息i
i
及认证信息i
a
。认证信息i
a
是用于存取计算机250的信息。藉由具有认证信息i
a
,可取得计算机250上所保存的许可信息i
p
。
[0102]
容器信息取得部91,自容器信息90取得识别信息i
i
及认证信息i
a
。容器信息取得部91将取得的识别信息i
i
及认证信息i
a
传送至许可信息处理部92。
[0103]
许可信息处理部92将识别信息i
i
及认证信息i
a
传送至计算机250。许可信息处理部92,利用认证信息i
a
个体认证至计算机250,并接收与识别信息i
i
相应的许可信息i
p
。许可信息处理部92将许可信息i
p
传送至喷出管制部93。
[0104]
在本例的喷出系统400中,由于取得许可信息i
p
时需要认证信息i
a
,因此,可禁止来自恶意者600的存取。因此,可更安全地取得对应于容器60的识别信息i
i
的许可信息i
p
。
[0105]
图8c表示喷出系统400的动作方法的一例。在本例中,表示容器信息90包含许可信息ip的喷出系统400的动作方法的一例。
[0106]
容器信息取得部91自容器信息90取得许可信息i
p
。本例的许可信息处理部92可直接自容器信息取得部91取得许可信息i
p
。容器信息取得部91将许可信息i
p
传送至许可信息处理部92。
[0107]
许可信息处理部92自容器信息取得部91取得许可信息i
p
。由此,许可信息处理部92,无需存取外部的数据库以取得许可信息i
p
。因此,可简化喷出系统400。许可信息处理部92将许可信息i
p
传送至喷出管制部93。喷出管制部93根据许可信息i
p
进行喷出部50中的喷出的限制或解除。
[0108]
图9表示管理容器60的剩余量的喷出系统400的一例。本例的许可信息处理部92,将存储于计算机250中的容器60的剩余量加以更新。
[0109]
喷出装置500,藉由容器信息取得部91取得容器信息90。又,喷出装置500取得容器60的总喷出时间。若知道容器信息90及总喷出时间,即可计算容器60的剩余量。容器60的剩
余量,可在喷出装置500计算,亦可在喷出装置500的外部计算。
[0110]
许可信息处理部92,自喷出装置500取得容器信息90及总喷出时间。许可信息处理部92亦可自喷出装置500取得容器60的剩余量。许可信息处理部92,具备与设于外部的计算机250进行通讯的手段,并将自喷出装置500取得的信息传送至计算机250。
[0111]
计算机250,藉由自许可信息处理部92接收的信息,更新容器60的剩余量。本例的计算机250,自许可信息处理部92接收容器60的剩余量。计算机250,亦可基于容器信息90及总喷出时间,计算容器60的剩余量。例如,计算机250更新许可信息i
p
的内容。藉由更新许可信息i
p
的内,根据最新的容器60的剩余量,可变更是否许可容器60的喷出。
[0112]
另外,容器60的空罐的制造商,亦可根据喷出状况来调整空罐的制造。内容物的填充业者,亦可根据喷出状况来调整容器60的制造。无人飞机100的使用者,可根据喷出状况来确认容器60的库存是否过多或过少、或确认作业的进行度。
[0113]
图10a表示具有对应于无线通信的容器信息90的容器60的一例。容器信息90亦可具有rfid(无线射频识别)等的无线通信装置。容器信息取得部91藉由无线通信来取得容器信息90。本例的容器信息90设于容器60的外表面上。容器信息取得部91并不限定于设在容器保持部40,也可设于无人飞机100的任意位置。当具备复数个容器保持部40时,亦可不针对每个容器保持部40设置容器信息取得部91。容器信息取得部91亦可针对复数个容器保持部40加以共通地设置。
[0114]
图10b表示具有对应于接触式通讯的容器信息90的容器60的一例。本例的容器信息90具有可藉由电气通讯来读取的半导体组件。例如,容器信息90具有如sim卡(识别模块卡)般的接触式通讯装置。本例的容器信息90设于容器60的外表面上。容器信息取得部91,在容器保持部40中,设于可与容器信息90连接的位置。
[0115]
图11a表示隐藏容器信息90的隐藏手段95的一例。隐藏手段95,藉由可解除的隐藏手段来隐藏容器信息90。
[0116]
所谓隐藏是指,禁止无权限者存取容器信息90。隐藏手段可为自外部物理性地隐藏容器信息90,亦可为电性地禁止存取容器信息90。
[0117]
本例的隐藏手段95覆盖容器信息90,将其隐藏以无法自外部看到。当容器信息90为可视觉地取得的二维代码时,隐藏手段95覆盖容器信息90,因此,恶意者600无法取得容器信息90。例如,隐藏手段95藉由可剥离的涂装来设置。又,隐藏手段95可为可剥离的封条(seal)。
[0118]
另外,当容器信息90可藉由无线通信而被容器信息取得部91取得时,隐藏手段95可为无线通信的通讯干扰装置。隐藏手段95禁止恶意者600藉由无线通信手段对容器信息90进行存取。
[0119]
图11b表示解除容器信息90的隐藏后的隐藏手段95的一例。由于容器信息90的隐藏被解除,因此,管理人700可取得容器信息90。当容器信息90为可视觉地取得的二维代码时,利用剥离隐藏手段95,容器信息90的隐藏状态得以解除。隐藏手段95可为物理性隐藏手段,亦可为电子性隐藏手段。
[0120]
图12a表示喷出装置500的剖面图的一例。图12b表示喷出装置500的侧视图的一例。本例的喷出装置500具有自容器信息90的取得到管制为止的功能。亦即,本例的喷出装置500具备喷出系统400的功能。
[0121]
缆线502与容器信息取得部91连接,将容器信息取得部91中取得的信息传送至电路基板504。电路基板504具备许可信息处理部92及喷出管制部93。通讯装置506,经由天线508,与外部的计算机250等进行发送和接收数据。通讯装置506的通讯方式并无特别限定。位置信息取得部510,经由天线512,取得无人飞机100的目前的位置信息。位置信息取得部510具有gps信号处理器及高度计。喷出管制部93进行喷出部50的喷出的限制或解除。喷出管制部93,当解除喷出的限制时,根据来自缆线514的喷出信号,使喷出驱动部80驱动。
[0122]
以上,利用实施方式说明本发明,但本发明的技术范围并不限定于上述实施方式所记载的范围。本领域技术人员明白可对上述实施方式实施各种变更或改良。由申请专利范围的记载可知,如此的经实施变更或改良的型态亦可包含于本发明的技术范围内。
[0123]
应注意的是,申请专利范围、说明书及图式中所示的装置、系统、程序以及方法中的动作、程序、步骤及阶段等各处理的实行顺序,只要未特别明示「更前」、「之前」等,另外只要并非于后一处理中使用前一处理的输出,则可按任意顺序实现。关于申请专利范围、说明书及图式中的动作流程,为方便起见而采用「首先,」、「其次,」等进行说明,但并不表示必须按该顺序实施。【符号说明】
[0124]
10:本体部12:固定摄影机15:脚部20:推进部21:旋转翼22:旋转驱动部24:腕部30:可动摄影机32:连结部40:容器保持部41:本体42:连结部43:第1端盖部44:第2端盖部45:螺纹部50:喷出部51:喷出口52:延伸部60:容器80:喷出驱动部81:凸轮82:凸轮从动件83:可动板90:容器信息
91:容器信息取得部92:许可信息处理部93:喷出管制部95:隐藏手段143:致动器145:阀杆100:无人飞机200:终端装置210:显示部220:控制器250:计算机300:操纵系统400:喷出系统500:喷出装置502:缆线504:电路基板506:通讯装置508:天线510:位置信息取得部512:天线514:缆线600:恶意者700:管理人
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

