1.本发明涉及无人机领域,具体地,涉及一种微型纵列反转双旋翼飞行器,尤其是涉及一种只使用两个直流无刷电机作为驱动器,配合被动铰链的调节螺旋桨桨叶攻角,控制其姿态的微型纵列反转双旋翼直升机。
背景技术:
2.小型无人飞行器目前越来越流行,尤其是可以在三维空间中悬停的旋翼式飞行器。这种旋翼型无人机的应用非常广泛,包括环境监察、植保、矿井探测、物品运输等。对于纵列反转双旋翼直升机而言,其两个旋翼为前后串列布局,后面的螺旋桨比前面的螺旋桨高,进一步提高了飞机的紧凑性。这种直升机的两个螺旋桨都提供升力,并且通常使用前旋翼产生飞行推力,又在滚转和俯仰中调节飞行器的方向。其中,美国波音公司所研发的ch
‑
47运输直升机,是美军服役的直升机当中载重量最高的型号之一。这种直升机的姿态控制通常是在螺旋桨上通过一种称为循环控制的技术实现的,即当桨叶旋转时,桨叶的俯仰角会随着倾斜盘发生周期性变化,从而提供不同方向的扭矩。通常这种循环控制是通过一种被称为倾斜盘的机械结构实现的,世界上第一个在直升机中使用的倾斜盘是1939年由美国工程师西科斯基研制而成,经多年发展直至今日。由于旋翼飞机的倾斜盘结构需要额外的舵机以及复杂的机械结构,这不仅增加了机器人的负重,还大大增加了机器人的复杂性及制造难度。
3.为了解决这个问题,cambridge ma大学的draper laboratory的charles s.提出了压电驱动器控制等方法实现微型无倾斜盘共轴反桨直升机。其中宾夕法尼亚大学的james paulos和mark yim提出了一种配合被动铰链的直升机电子倾斜盘的控制方法,该方法通过在螺旋桨上加入被动铰链结构,配合适当的加减速换向控制,即可模拟出机械倾斜盘的效果。但是,针对纵列反转双旋翼直升机,对于如何减少飞行器的总驱动器数目且飞行器还能保持可控性,却一直没有方案,相关研究还处于初级阶段。
4.专利文献cn110092000a公开了一种全电动倾转旋翼无人机,它包括机体、前梁、后梁和油动发动机,所述的前梁、后梁分别配置在机体的中前部和后部,油动发动机安装在机体内,所述的前梁两侧分别安装有一个倾转旋翼机桨叶,其特征是所述的油动发动机与发电机相连发电,发电机分别与动力电动机及倾转电动机电气连接,动力电动机驱动倾转旋翼机桨叶转动,倾转电动机驱动倾转旋翼机桨叶倾转;所述的动力电动机及倾转电动机均安装在前梁的端部。该方案采用倾转电动机驱动桨叶倾转,结构仍然较复杂,重量仍然较重。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种微型纵列反转双旋翼飞行器。
6.根据本发明提供的一种微型纵列反转双旋翼飞行器,包括主板、控制系统、电池、第一飞行器驱动机构、第二飞行器驱动机构以及支架;
7.所述第一飞行器驱动机构、第二飞行器驱动机构、控制系统、电池均安装在所述主板上;所述支架安装在所述主板的底端;
8.所述电池用于提供电源;;
9.所述第一飞行器驱动机构、第二飞行器驱动机构均与所述控制系统电连接;
10.所述第一飞行器驱动机构用于为所述飞行器提供升力、为飞行器提供扭转力矩;
11.所述第二飞行器驱动机构用于为所述飞行器提供升力、控制飞行器的偏航角。
12.优选地,所述主板上设置有第一安装位以及一个或多个第二安装位;
13.所述控制系统、所述电池分别安装在所述第一安装位、第二安装位上。
14.优选地,所述第一飞行器驱动机构包括第一电机、被动铰链结构、第一电机支撑架以及多个第一螺旋桨桨叶;
15.所述第一电机安装在所述第一电机支撑架上,所述第一电机的输出轴与所述被动铰链结构连接,多个所述第一螺旋桨桨叶均安装在所述被动铰链结构上;
16.第一电机支撑架直接或间接安装在所述主板上。
17.优选地,所述第一飞行器驱动机构还包括第一一体化电路;
18.所述控制系统、所述第一电机均与所述第一一体化电路电连接。
19.优选地,所述被动铰链结构包括第一电机输出轴连接件以及多个可动机翼连接件;
20.所述第一电机输出轴连接件与所述第一电机的输出轴连接;
21.所述第一螺旋桨桨叶与所述可动机翼连接件的数量相匹配,且所述第一螺旋桨桨叶一对一的安装在所述可动机翼连接件上;
22.多个所述可动机翼连接件沿所述第一电机输出轴连接件周向分布,且所述可动机翼连接件与所述第一电机输出轴连接件可转动连接;
23.所述可动机翼连接件与所述第一电机输出轴连接件的转动轴与所述第一电机的输出轴不平行且不垂直。
24.优选地,所述第二飞行器驱动机构包括第二电机、固定连接件、第二电机支撑架以及多个第二螺旋桨桨叶;
25.所述第二电机通过所述固定连接件与多个所述第二螺旋桨桨叶连接,且多个所述第二螺旋桨桨叶沿所述固定连接件的周向分布;
26.所述第二电机安装在所述第二电机支撑架上;
27.所述第二电机支撑架直接或间接安装在所述主板上。
28.优选地,所述第二飞行器驱动机构还包括第二一体化电路;
29.所述控制系统、所述第二电机均与所述第二一体化电路电连接。
30.优选地,所述第一一体化电路包括电机驱动模块、传感模块、电机控制模块。
31.优选地,所述第二一体化电路包括电机驱动模块、传感模块、电机控制模块。
32.优选地,所述主板由碳纤维材料制成。
33.与现有技术相比,本发明具有如下的有益效果:
34.1、本发明没有使用倾斜盘结构或舵机来调整飞行器姿态,使飞行器具有质量轻、体积小、寿命长、成本低、适应复杂环境工作的特点。
35.2、本发明中第一一体化电路与第二一体化电路均通过支撑柱安装在所述主板上
的设计形成了多层结构。所述多层结构的设计减轻了飞行器重量,增大飞行器重心范围,承载了飞行过程可能会遇到的碰撞,使所述飞行器能适应恶劣环境下的工作。
36.3、本发明设计了一种新型的飞行器控制方式:仅使用两个高度集成的飞行器驱动机构作为飞行器的驱动器,配合被动铰链结构以及固定连接件进行姿态控制,相比目前主流技术的“四旋翼”或者“两旋翼 两舵机”的结构少了两个驱动器,从而降低了飞行器的重量,避免了倾斜盘的复杂机械结构,降低微型飞行器的生产成本;
37.4、本发明主板的形状设计可配合控制系统、所述电池第一飞行器驱动机构以及第二飞行器驱动机构的安装位置,发挥电机的最大升力,扩大机体重心范围,提高飞行器的稳定性及载重能力。
附图说明
38.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
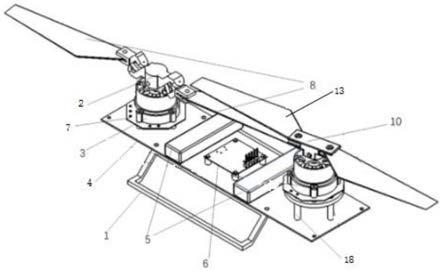
39.图1为本发明的轴侧结构示意图;
40.图2为本发明的主视结构示意图;
41.图3为本发明中第一飞行器驱动机构的轴测结构示意图;
42.图4为本发明中第一飞行器驱动机构的主视结构示意图;
43.图5为本发明中第二飞行器驱动机构的轴测结构示意图;
44.图6为本发明中第二飞行器驱动机构的主视结构示意图;
45.图7为本发明中被动铰链结构的轴测结构示意图。
46.图中示出:
47.具体实施方式
48.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术
人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
49.本发明提供了一种微型纵列反转双旋翼飞行器,包括主板4、控制系统6、电池5、第一飞行器驱动机构、第二飞行器驱动机构以及支架1。
50.所述电池5用于向微型纵列反转双旋翼飞行器中的其它部件提供电源。
51.如图1所示,所述第一飞行器驱动机构、第二飞行器驱动机构均为高度集成结构,并且所述第一飞行器驱动机构、第二飞行器驱动机构、控制系统6、电池5均安装在主板4上;其中所述第一飞行器驱动机构、第二飞行器驱动机构分别安装在所述主板4的两端,所述支架1安装在所述主板4的底端;所述飞行器利用所述支架1进行停放作业。
52.所述第一飞行器驱动机构、第二飞行器驱动机构均与所述控制系统6电连接;通过控制系统控制第一飞行器驱动机构、第二飞行器驱动机构便可以控制飞行器的姿态稳定与飞行状态。
53.所述第一飞行器驱动机构承受飞行器的正常运作,跌落等,且所述第一飞行器驱动机构用于为所述飞行器提供升力、为飞行器提供扭转力矩;
54.所述第二飞行器驱动机构能承受飞行器的正常运作,跌落等,且所述第二飞行器驱动机构用于为所述飞行器提供升力、控制飞行器的偏航角。
55.如图1以及图2所示,所述主板4上设置有第一安装位以及一个或多个第二安装位;所述控制系统6、所述电池5分别安装在所述第一安装位、第二安装位上。在一个优选例中,通过在所述主板4上打孔的方式形成第一安装位、第二安装位,并且所述第一飞行器驱动机构、第二飞行器驱动机构是均通过孔与所述支撑柱11配合的方式安装在所述主板4上。所述主板4的形状设计关乎所述飞行器的元器件分布及飞行稳定性,并且可以根据控制系统6、所述电池5第一飞行器驱动机构以及第二飞行器驱动机构的安装位置调整飞行器整体重心范围,提高飞行器的稳定性。
56.如图1、图2、图3以及图4所示,所述第一飞行器驱动机构包括第一电机9、被动铰链结构2、第一电机支撑架3以及多个第一螺旋桨桨叶8;所述第一电机9安装在所述第一电机支撑架3上,所述第一电机支撑架3直接或间接安装在所述主板4上。所述第一电机的输出轴与所述被动铰链结构2连接,多个所述第一螺旋桨桨叶8均安装在所述被动铰链结构2上。
57.所述被动铰链结构2是经过特殊设计的机翼
‑
电机连接部件,可用3d打印的方式制作而成,作用是可通过调节第一电机9在单圈中旋转的加减速转,利用所述被动铰链结构2改变第一螺旋桨桨叶8的攻角,从而为飞行器提供扭转力矩。如图7所示,所述被动铰链结构2包括第一电机输出轴连接件15以及多个可动机翼连接件14;所述第一电机输出轴连接件15与所述第一电机9的输出轴连接;所述第一螺旋桨桨叶8与所述可动机翼连接件14的数量相匹配,且所述第一螺旋桨桨叶8一对一的安装在所述可动机翼连接件14上;多个所述可动机翼连接件14沿所述第一电机输出轴连接件15周向分布,且所述可动机翼连接件14与所述第一电机输出轴连接件15可转动连接;所述可动机翼连接件14与所述第一电机输出轴连接件15的转动轴与所述第一电机9的输出轴不平行且不垂直。在一个优选例中,所述第一电机输出轴连接件15与可动机翼连接件14之间通过销钉连接配合连接。所述被动铰链结构2与所述第一电机9的输出轴紧密配合,通过控制第一电机9在旋转一圈之内的加减速运动,改
变被动铰链结构2中,可动机翼连接件14与第一电机输出轴连接件15的相对角度,从而改变螺旋桨桨叶的攻角,进而实现不同方向旋转的扭矩力。
58.所述第一飞行器驱动机构还包括第一一体化电路7;所述控制系统6、所述第一电机9均与所述第一一体化电路7电连接。所述第一一体化电路7包括电机驱动模块、传感模块、电机控制模块,且为pcb板结构。
59.如图1、图2、图3以及图4所示,在一个优选例中,所述第一电机9为直流无刷电机,所述第一电机支撑架3具有特定的形状、大小且由3d打印的方式制作而成;第一电机支撑架3上具有四个由3d打印而成的低支撑柱17;所述第一一体化电路7上具有安装孔,所述低支撑柱17穿过所述安装孔实现所述第一电机支撑架3与所述第一一体化电路7的连接,最后利用螺钉将所述低支撑柱17安装在所述主板4上。其安装方式可以为先把第一电机9安装在第一电机支撑架3上,再将第一电机支撑架3上的低支撑柱17穿过所述安装孔,最后将螺钉分别套装在所述四个低支撑柱17内,所述螺钉的长度大于所述低支撑柱17的长度,利用螺钉将所述低支撑柱17与所述主板4连接,所述四个低支撑柱17上还可以设置有限位结构,用于限定所述第一一体化电路7在四个低支撑柱17上的位置。
60.所述第二飞行器驱动机构包括第二电机11、固定连接件10、第二电机支撑架12以及多个第二螺旋桨桨叶13;所述第二电机11为直流无刷电机;所述第二电机支撑架12具有特定的形状、大小且由3d打印的方式制作而成;所述第二电机11通过所述固定连接件10与多个所述第二螺旋桨桨叶13连接,且多个所述第二螺旋桨桨叶13沿所述固定连接件10的周向分布;
61.如图1、图2、图5以及图6所示,所述第二电机11安装在所述第二电机支撑架12上。所述第二电机支撑架12直接或间接安装在所述主板4上。所述第二飞行器驱动机构还包括第二一体化电路16;所述第二一体化电路16包括电机驱动模块、传感模块、电机控制模块,且为pcb板结构。所述控制系统6、所述第二电机11均与所述第二一体化电路16电连接。所述固定连接件10是经过特殊设计的机翼
‑
电机连接部件,具有特定的形状、大小且由3d打印的方式制作而成;所述固定连接件10与所述第二电机11所具有的电机输出轴紧密配合,所述固定连接件10用于将电机输出轴的旋转直接传动到第二螺旋桨桨叶13上,使第二螺旋桨桨叶13跟随第二电机11的输出轴转动。通过控制第二电机11的旋转速度从而控制所述飞行器的后侧升力及偏航角。
62.如图1、图2、图5以及图6所示,在一个优选例中,先把第二电机11安装在第二电机支撑架12上,且第第二电机支撑架12上具有四个由3d打印而成的低支撑柱17;所述第二一体化电路16上具有安装孔;所述第二电机支撑架12上的低支撑柱17穿过所述第二一体化电路16上的安装孔实现所述第二电机支撑架12与所述第二一体化电路16的连接。再通过螺钉将所述第二电机支撑架12上的低支撑柱17安装在带有高支撑柱的连接架18上;最后利用螺钉将所述连接架18安装在所述主板4上。所述连接架18可以由3d打印的方式制作而成。
63.所述的控制系统6是结合飞行器电源管理、姿态传感器、姿态处理器、通信模块的飞行控制系统,在一个优选例中,所述的控制系统6通过四个由3d打印而成的低支撑柱17与螺钉安装在所述主板4上。
64.在一个优选例中,所述第一电机9与第二电机11均采用郎宇x2206,kv1500的直流无刷电机;所述的第一螺旋桨桨叶8与第二螺旋桨桨叶13均采用材料为abs,尺寸为8.5cm
长,2.3cm宽的通用直升机桨叶;所述的电池5的数量为2个,采用450mah放电倍率为75c的格氏2s锂电池,分别给前后两个电机进行供电。所述主板4,由碳纤维材料制成。
65.本发明的工作原理为:
66.通过控制第一电机9、第二电机11的平均旋转速度可以控制飞行器的升力;通过控制第一电机9、第二电机11的旋转差速可以控制飞行器的偏航角及俯仰角;通过控制第一电机9在单周期内的旋转加减速运动,使得被动铰链结构2按照控制方式摆动,从而控制飞行器的横滚角与俯仰角。
67.本发明采用仅有的第一电机9与第二电机11两个直流无刷电机作为飞行器的执行器而没有另外使用舵机来调整飞行器姿态。通过第一电机9以及第二电机11的控制配合即可完成飞行器的飞行升力与姿态控制。从而使飞行器具有了质量轻、体积小、成本低、等特点。
68.本发明中第一一体化电路7与第二一体化电路16均通过支撑柱安装在所述主板4上的设计形成了多层结构。所述多层结构的设计减轻了飞行器重量,增大飞行器重心范围,承载了飞行过程可能会遇到的碰撞,使所述飞行器能适应恶劣环境下的工作。
69.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
70.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

