1.本发明涉及降低飞行器噪声,尤其涉及降低由飞行器的无管道推进式转子(upr)产生的噪声。
背景技术:
2.与常规飞行器相比,混合和电动飞行器推进技术具有减少化石燃料使用、co2排放、操作成本和噪声足迹的能力。此类飞行器通常采用无管道推进式转子(upr)。例如,此类飞行器的分布式推进布置结构可采用许多无管道推进式转子(upr)。然而,对由飞行器的upr转子生成的噪声(包括社区噪声和舱噪声)的管理不是微不足道的问题,并且是此类飞行器的主要设计问题。对于upr的设计要求,包括推力要求,对转子rpm(角速度)、叶片螺距、空气速度和其他因素施加约束,这些因素单独地或共同地影响由upr生成的噪声。为了减少给定位置处的社区噪声,通常不希望调整rpm,因为所得的音调变化对地面上的人而言是特别明显的。无论upr如何供电,都可能需要管理由upr产生并在飞机的地面上或机载上经历的噪声。
技术实现要素:
3.本发明的第一方面提供了一种用于飞行器的无管道推进式转子的降噪系统,其中该系统包括:
4.循环螺距机构,该循环螺距机构被布置成将循环螺距行程应用于该无管道推进式转子的转子叶片,该循环螺距行程的相位是可调整的,并且该循环螺距行程的叶片螺距在相对于该无管道推进式转子的转子轴线的第一方位角间隔内低于其平均值;
5.定位定姿系统,该定位定姿系统被布置成确定该无管道推进式转子的位置和姿态;
6.存储器,该存储器存储地面点的位置;和
7.处理器,该处理器被布置成执行以下步骤:
8.(i)分别从该定位定姿系统以及该存储器接收与该无管道推进式转子的位置和姿态以及该地面点的位置对应的输入数据;
9.(ii)接收对应于该飞行器的速度的输入数据;
10.(iii)根据该输入数据确定地面点在大于或等于该系统的反应时间的时间段之后将进入该无管道推进式转子的转子平面,并且计算该转子平面中的位置的径向坐标和方位角坐标,在该位置处,地面点将相对于该无管道推进式转子的转子轴线进入该转子平面;并且
11.(iv)根据需要将控制信号输出到该循环螺距机构以调整该循环螺距行程的相位,使得第一方位角间隔包括在步骤(iii)中确定的方位角坐标。
12.通过调整该循环螺距行程的相位,使得第一方位角间隔包括进入upr的平面的地面点的方位角坐标,该地面点处的噪声水平被布置成低于相对于upr的转子轴线的所有方
位角位置的平均噪声水平。
13.优选地,该处理器被布置成向循环螺距机构输出控制信号以调整循环螺距行程的相位,使得循环螺距行程的最小叶片螺距的方位角位置等于在步骤(iii)中确定的方位角坐标,使得当其进入upr的转子平面时,地面点处的噪声水平最小化。
14.该存储器可存储对应于与地面点相关联的阈值噪声值的阈值数据,并且该处理器可被布置成执行以下步骤:
15.(v)接收该阈值数据;
16.(vi)至少使用该地面点将进入该转子平面的位置的径向坐标来生成该地面点的计算噪声水平;并且
17.(vii)将该计算噪声水平与该阈值噪声值进行比较;
18.并且如果该计算噪声值超过阈值噪声值,则将控制信号输出到循环螺距机构。在这种情况下,只有当针对进入upr平面的地面点的位置的计算噪声水平超过阈值噪声值时,才调整循环螺距行程的相位。例如,如果飞行器正在高海拔下操作,则不调整循环螺距行程的相位。
19.该存储器可存储多个地面点中的每个地面点的位置,并且该处理器被布置成执行以下步骤:
20.(i)接收对应于这些地面点中的每个地面点的位置的输入数据;
21.(ii)确定在大于或等于该系统的反应时间的时间段之后将同时进入该无管道推进式转子的转子平面的两个或更多个地面点;
22.(iii)计算该转子平面中的相应位置的径向坐标和方位角坐标,在该径向坐标和方位角坐标处,该两个或更多个地面点中的每个地面点将相对于该无管道推进式转子的转子轴线进入该转子平面;并且
23.(iv)根据需要将控制信号输出到该循环螺距机构以调整该循环螺距行程的相位,使得第一方位角间隔包括这些位置中的每个位置的方位角坐标。
24.从而可降低或减少同时进入upr转子平面的两个或更多个地面点处的噪声水平。
25.存储器可存储多个地面点中的每个地面点的位置和对应于噪声阈值的阈值数据,这些阈值数据中的每个阈值数据对应于相应的地面点,并且该处理器被布置成执行以下步骤:
26.(i)接收对应于这些地面点中的每个地面点的位置的输入数据和阈值数据;
27.(ii)确定在大于或等于该系统的反应时间的时间段之后将同时进入该无管道推进式转子的转子平面的两个或更多个地面点;
28.(iii)计算该转子平面中的相应位置的径向坐标和方位角坐标,在该径向坐标和方位角坐标处,该两个或更多个地面点中的每个地面点将相对于该无管道推进式转子的转子轴线进入该转子平面;
29.(iv)对于在步骤(ii)中确定的那些位置中的每个位置,至少使用该位置的径向坐标来生成相应的计算噪声水平;
30.(v)对于每个位置,比较该计算噪声水平和阈值噪声水平,并且确定该计算噪声水平在最大程度上超过该阈值噪声水平的位置;并且
31.(vi)将控制信号输出到循环螺距机构,使得该循环螺距行程的最小叶片螺距的方
位角位置等于在步骤(v)中确定的位置的方位角坐标。
32.在这种情况下,对应于循环噪声行程的最小叶片螺距的方位角位置被布置成与该地面点的upr平面中的方位角位置重合(即,在该方向上转向),对于该地面点,噪声阈值水平在最大程度上被超过。
33.由处理器输出的控制信号激活循环螺距机构可将upr的叶片螺距从恒定的总螺距值改变为循环螺距行程,该循环螺距行程的平均值等于总螺距值,使得upr的推进推力保持至少大致不变。另选地,循环螺距机构可连续地将循环螺距行程应用于upr的转子叶片,其中仅循环螺距行程的相位由处理器控制,而不是叶片螺距与其平均值的最大偏差。
34.处理器和存储器可远离upr和循环螺距机构定位,该系统还包括用于定位定姿系统与处理器之间以及处理器与循环螺距机构之间的无线通信的装置。例如,处理器和存储器可位于地面上,其中仅upr、循环螺距机构以及定位定姿系统位于安装upr的飞行器上。
35.本发明的第二方面提供了一种包括根据第一方面的降噪系统的飞行器,其中处理器、存储器、定位定姿系统、循环螺距机构和无管道推进式转子包括在该飞行器中。
36.该处理器可被布置成调整循环螺距行程的相位,使得第一方位角间隔包括对应于位置矢量的方位角位置,该位置矢量为在该飞行器的海拔大于阈值海拔值时从该无管道推进式转子在其转子平面中的转子轴线到该飞行器的机身的中心纵向轴线上的点的矢量。在不需要降低社区或地面噪声的情况下,例如当飞行器在高海拔下操作时,这减少了飞行器上乘客经受的噪声。
37.优选地,该处理器被布置成调整循环螺距行程的相位,使得无管道推进式转子的最小叶片螺距的方位角位置对应于在该飞行器的海拔大于阈值海拔值时从该无管道推进式转子在其转子平面中的转子轴线到飞行器的机身的中心纵向轴线上的点的位置矢量,使得在不需要降低地面噪声或社区噪声的情况下最小化由upr生成并由乘客经受的噪声。
38.本发明的第三方面提供了一种降低由飞行器的无管道推进式转子(upr)生成的噪声的方法,该方法包括以下步骤:
39.(i)识别将进入该upr的转子平面的地面点;
40.(ii)确定该转子平面中的位置的方位角坐标,在该位置处,该地面点将相对于该upr的转子轴线进入该转子平面;
41.(iii)将循环螺距行程应用于该upr的转子叶片,并且根据需要控制该循环螺距行程的相位,使得该循环螺距行程的叶片螺距低于其平均值的方位角间隔包括地面点将进入该upr的转子平面的位置的方位角坐标。
42.优选地,步骤(iii)包括根据需要控制该循环螺距行程的相位,使得该循环螺距行程的最小叶片螺距相对于该转子轴线的方位角位置与该upr的转子平面中的位置的方位角坐标重合,在该位置处,该地面点将进入该upr的转子平面,使得该位置处的噪声最小化。
43.该方法还可包括以下步骤:至少使用地面点将进入转子平面的位置的径向坐标来生成该地面点的计算噪声水平,将该计算噪声水平与阈值噪声水平进行比较,以及如果该计算噪声水平超过该阈值噪声水平,则控制或调整循环螺距行程的相位。
44.该方法可包括以下步骤:识别将进入upr的转子平面的两个或更多个地面点,确定这些地面点将进入转子平面的位置相对于转子轴线的方位角坐标,以及控制循环螺距行程的相位,使得该循环螺距行程的叶片螺距低于其平均值的方位角间隔包括地面点将进入该
upr的转子平面的位置的方位角坐标。
45.该方法可包括以下步骤:
46.(i)确定将同时进入该无管道推进式转子的转子平面的两个或更多个地面点;
47.(ii)计算该转子平面中的相应位置的径向坐标和方位角坐标,在该径向坐标和方位角坐标处,该两个或更多个地面点中的每个地面点将相对于该无管道推进式转子的转子轴线进入该转子平面;
48.(iii)对于在步骤(ii)中确定的那些位置中的每个位置,至少使用该位置的径向坐标来生成该地面点的相应计算噪声水平;
49.(iv)对于每个位置,比较该计算噪声水平和阈值噪声水平,并且确定该计算噪声水平以最大量超过该阈值噪声水平的位置;并且
50.(v)将控制信号输出到循环螺距机构,使得该循环螺距行程的最小叶片螺距的方位角位置等于在步骤(iv)中确定的位置的方位角坐标。
附图说明
51.参考附图并且仅以举例的方式来描述本发明的实施方案,其中:
52.图1和图2分别示出了水平飞行中的飞行器的前视图和侧视图;
53.图3示出了图1飞行器的转子叶片系统的几何形状;
54.图4示出了具有向上螺距和零滚转的图1飞行器的侧视图;
55.图5示出了具有有限滚转和零螺距的图1飞行器的前视图;
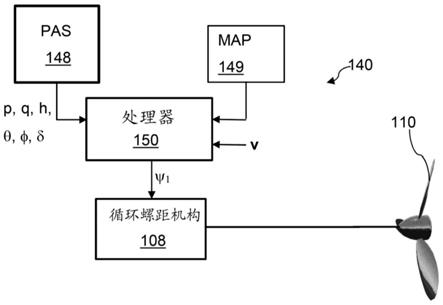
56.图6示意性地示出了包括在图1、图2和图4的飞行器中的降噪系统;
57.图7是示出与图1飞行器的无管道推进式转子相关的地面点的示意图;
58.图8示出了对无管道推进式转子的正弦循环螺距行程的相位的调整;
59.图9示出了具有非正弦函数形式的循环螺距行程;
60.图10示出了在居民区上方水平飞行的飞行器;并且
61.图11示出了处于高海拔的图10飞行器。
具体实施方式
62.图1示出了水平向前飞行的飞行器100的前视图。该飞行器100具有四个无管道推进式转子(upr),诸如110,飞行器100的每个翼部安装相应的一对upr。upr 110包括被安装用于在转子平面111中围绕转子轴线112旋转的一组转子叶片。其他三种upr在结构、功能、操作和效果上类似于upr 110,并且将不再进一步描述。转子平面111中的轴线114、116各自穿过转子轴线112并且分别平行于飞行器100的水平平面121和竖直平面122,轴线114、116和平面121、122固定在飞行器100的框架中。如图1所示,转子平面111垂直于飞行器100的水平平面121。关于转子轴线112的方位角坐标ψ在箭头115指示的方向上增大,并且使其原点(ψ=0)与轴线114重合。转子轴线112具有高于地平面50的海拔h,该海拔由转子轴线112与转子平面111交汇的点101限定。转子平面111中转子轴线112正下方的地面上的点51具有位置p,q,即纬度p和经度q。例如,如果位置x,y位于地面上的居民区内,则可能需要降低由upr 110产生并在转子平面111中具有位置x,y(在距转子轴线112的径向位置r处)的点55处接收的噪声强度。图2示出了飞行器100的侧视图。转子平面111的前向法向矢量118与转子轴线
112重合。由于飞行器100处于水平飞行中,因此法向矢量118平行于地面50以及飞行器100的水平平面121。在其他示例中,法向矢量可能不总是平行于飞行器的水平平面,例如,当飞行器在向前飞行和起飞或着陆模式之间转变时,vtol倾斜翼部飞行器的upr的转子平面倾斜于飞行器的水平平面。
63.另外参见图3,一般来讲,前向法向矢量118相对于轴线115、117具有极角θ和方位角φ,该极角和方位角限定平行于地平面50的南北轴线和东西轴线。在图3中,正北由n表示。最可能受到转子110生成的噪声的不利影响的地平面50上的位置是位于转子110的转子平面111中的那些位置;这些位置通常取决于法向矢量118的取向θ,φ、点101的海拔h以及点101的垂直下方的地面上的点51的位置p,q。图4示出了法向矢量118的示例性取向,其中θ≠0但φ=0。图5示出了飞行器100的示例性取向,其中飞行器100具有有限滚转角δ,但法向矢量118平行于地平面50。落在转子平面111内的地面上的位置与飞行器处于水平飞行(图1和图2)的情况下的位置相同;在任一情况下,该点的径向位置r都是相同的,但与图1所示的情况相比,方位角坐标ψ增大δ。
64.另外参见图6,包括在飞行器100中用于降低由upr 110生成并且在转子平面111中的地平面50上的一个或多个位置诸如55处接收的噪声的降噪系统140,该降噪系统包括定位定姿系统(pas)148、存储器149、处理器150以及联接到upr 110的转子叶片的循环螺距机构108。pas 148提供对应于转子轴线112与转子平面111相交的点101的纬度、经度和海拔h以及飞行器100的滚转角δ的位置和姿态数据。存储器149存储地面点x,y和每个地面点x,y的相应噪声阈值的列表,其中给定地面点的噪声阈值是该地面点的最大可接受噪声水平。对应于飞行器100的速度矢量v的数据也被输入到处理器150。使用来自pas 148的位置和姿态数据、飞行器速度v和保持在存储器149、处理器150中的数据确定在经过大于或等于系统140的反应时间的一段时间后将落在upr 110的转子平面111内的该组地面点x,y,以及这些地面点将进入转子平面111的位置的极坐标r,ψ。参见图7,对于在大于或等于系统140的反应时间的时间段之后预测为落入转子平面111内的每个此类位置x,y 55,处理器150至少基于r的值来计算从轴线112到转子平面111内的地面点x,y预期进入upr 110的转子平面111的位置的位置矢量r的量值r,以及由upr 110在转子平面111中的该位置处生成的噪声水平。确定转子平面111中给定位置r,ψ处的噪声水平可另外考虑因素诸如方位角位置ψ的当前叶片螺距和upr 110的角速度或rpm。处理器150还确定来自upr 110的计算噪声水平超过对应的阈值噪声值的那些位置r,ψ。如果存在一个此类位置,则处理器150确定该位置的方位角位置ψ。在存在多于一个此类位置的情况下,处理器150确定位置r,ψ(在该位置处,噪声阈值以最大量被超过)和该地面位置的方位角坐标ψ。
65.然后,处理器150向循环螺距机构108提供控制信号,使得正弦循环螺距行程p(ψ)被应用于转子110的叶片。这意味着转子的叶片螺距从不依赖于的总螺距值p0变化为形式p(ψ)=p0 p1sinψ,其中p1是恒定的最大螺距偏移或与p0的偏差。参见图8,正弦循环螺距行程由曲线180指示。叶片螺距p(ψ)在间隔ψ=π
‑
2π之间低于叶片螺距的平均值p0,并且在0至2π的间隔之间高于平均值。叶片螺距在ψ=π/2,3π/2处分别具有最大值和最小值p0±
p1。处理器150控制循环螺距机构108以调整循环螺距行程的相位,例如可应用相移ε来生成前移或后移的正弦循环螺距行程p(ψ)=p0 p1sin(ψ
±
ε)182、184,其中ε是可变的。
66.如上所述,处理器150识别在大于或等于系统140的反应时间的时间段之后由处理
器150预测进入转子平面111的单个地面点x,y,然后通过控制相位ε来控制循环螺距机构108,使得最小叶片螺距值p0‑
p
1 186出现在对应于所识别的地面点x,y进入转子平面111时的方位角坐标ψ的ψ值处。通过将叶片螺距p(ψ)的值从总螺距值p0减少到所识别的地面点x,y的方位角坐标ψ处的值p0‑
p1,在该地面点处接收的噪声得以减少。因此,最小叶片螺距的方向ψ由处理器150操纵以与upr 110的转子平面111中的所识别的基点x,y的方位角坐标ψ重合。
67.由于与总螺距值p0相比叶片螺距在0至π的范围内增加并在π至2π的范围内减少,因此由转子110产生的总推力不会显著改变,尽管转子轴线112上的净力在转子平面112中产生。通过在转子110的转子叶片上施加循环螺距行程并将最小叶片螺距186布置成在方位角ψ上与所识别的地面点x,y重合,在不改变upr 110的角速度(rpm)的情况下实现该地面点处的地面降噪。改变飞行器的upr的rpm会引起音调变化,这对于地面上的人而言是特别明显且令人讨厌的,并且还会改变upr的推进推力,从而影响飞行器的操作。
68.如果调整应用于转子110的转子叶片的循环螺距行程的相位ε,使得在对应于地面位置x,y的方位角位置ψ处的叶片螺距低于平均值,则与转子110的转子叶片具有恒定的总螺距p0的情况相比,由转子110生成并在位置x,y处接收的噪声减少。最小叶片螺距186的方位角位置不必与位置x,y的方位角位置重合,以便实现x,y处的降噪,尽管在这种情况下可以实现最大降噪。例如,假设循环螺距行程的相位ε被调整为使得转子110的叶片螺距低于叶片螺距平均值的方位角间隔包括地面点x,y的方位角位置,则当该地面点在转子平面111中时,由于叶片螺距在地面点x,y的方位角位置处从总值p0(即使未最小化)减少,因此噪声在该地面点处减少。
69.在两个或更多个地面点x,y被预测为在大于或等于系统140的反应时间的时间段之后同时落入转子平面111内的情况下,处理器150可另选地控制循环螺距行程的相位ε,使得所有此类地面点均位于upr 110的叶片螺距低于平均值的方位角间隔内。如果这种情况不可行,则处理器150可以控制循环螺距机构108,使得对应噪声阈值以最大量被超过的地面点位于方位角间隔内,在该方位角间隔内,upr 110的叶片螺距低于平均值或对应于循环螺距行程的最小叶片螺距。另选地,处理器150可被布置用于叶片螺距低于平均值的方位角间隔,以包括投影落在upr 110的转子平面111内的尽可能多的地面点。
70.可通过采用斜盘机构作为循环螺距机构109来将正弦循环螺距行程诸如180应用于转子的转子叶片。(通常直升机采用斜盘系统向其转子叶片提供正弦循环螺距行程,以实现直升机的侧向移动。)在其他示例中,循环螺距行程不是正弦的。例如,参考图9,应用于转子110的转子叶片的循环螺距行程可具有准方波190的形式;用于实现循环螺距行程280的柔性座圈机构在美国专利10,272,998中有所描述。对于与p0的给定最大螺距偏差,准方波190的螺距偏差|p(ψ)
‑
p0|的平均值在0至2π和π至2π的间隔内大于正弦螺距行程180的该平均值。由曲线192指示的循环螺距行程可通过将斜盘与us 10,272,998中所述的柔性座圈布置结构组合来实现。曲线194是另一个循环螺距行程,其中叶片螺距的量值在π/2和3π/2附近迅速增加,但在其他位置处为零(即p(ψ)=p0,除了π/2和3π/2)。在0、π、2π处及其附近,螺距偏差为零,这是空气动力学有益的,因为叶片螺距等于翼部的方位角位置(ψ=0,π,2π)处的总螺距值p0。
71.图10示出了在居民区上方的低海拔处的水平飞行中(即,水平平面121平行于地
面)的飞行器100。将循环螺距行程应用于upr 110,使得叶片螺距的最小值出现的方位角位置对应于竖直向下方向195,并且叶片螺距的最大值出现的方位角位置对应于竖直向上方向196。upr 110的总推力相对于恒定的总叶片螺距的推力大致保持,但社区噪声减少。upr 110的rpm未改变,从而避免了音调噪声的改变。图11示出了当存储器149中没有存储由处理器150预期或预测为落入upr 110的转子平面111内的地面点时处于水平飞行中的飞行器100。这通常发生在高海拔处和/或非居民区的区域中。在这种情况下,处理器150可任选地控制循环螺距机构108,使得叶片螺距的最小值的方位角位置对应于upr 110的转子平面111中从轴线112到飞行器100的中心纵向轴线102的位置矢量161。这种布置结构为飞行器100上的乘客最小化噪声。在这种情况下,循环螺距机构可不操作以从恒定的总螺距模式切换到循环螺距模式;upr 110可总是具有循环螺距行程,只有行程的相位由处理器调整,以根据需要降低社区噪声或飞行器100上的乘客经受的噪声。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

