1.本发明涉及的是一种船舶螺旋桨能量分配方法,具体地说是混合动力船舶螺旋桨能量分配方法。
背景技术:
2.随着能源危机的加剧和排放法规的日益严格,混合动力船舶成为面对这一难题的有效途径,天然气发动机/电机混合动力系统则凭借天然气发动机绿色、经济、高效的优势成为一个研究热门。传统船舶螺旋桨直接与船用发动机通过减速箱机械相连,通过控制发动机转速便可以控制螺旋桨转速,而气电混合动力系统存在多种推进模式,如纯电机推进模式、纯气体机推进模式、机械推进充电推进模式、混合推进模式等,不同推进模式动力源不同,因此要控制螺旋桨转速,需要协调控制气体机和电机转速,具有较大的控制难度。
技术实现要素:
3.本发明的目的在于提供通过协调控制气体机和电机的转速及扭矩输出来控制螺旋桨转速的基于螺旋桨转速闭环的气电混合动力船舶能量分配方法。
4.本发明的目的是这样实现的:
5.本发明基于螺旋桨转速闭环的气电混合动力船舶能量分配方法,其特征是:
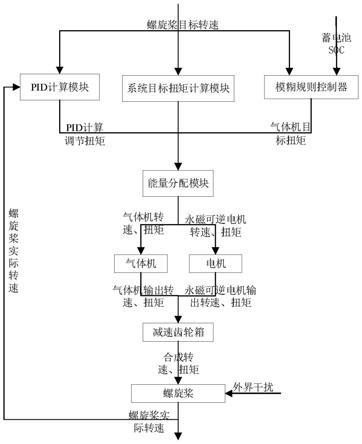
6.(1)通过pid计算模块计算调节扭矩t_t;
7.(2)根据螺旋桨目标转速计算系统目标扭矩t_target;
8.(3)通过模糊规则控制器,根据螺旋桨目标转速和蓄电池soc计算气体机目标扭矩n
e
_target;
9.(4)通过能量分配模块分配气体机转速n
e
、扭矩t
e
和永磁同步可逆电机转速n
m
、t
m
扭矩;
10.(5)减速齿轮箱转速、扭矩合成。
11.本发明还可以包括:
12.1、通过模糊规则控制器计算气体机目标扭矩t
e
_target:该模糊规则控制器包含两输入单输出,输入为螺旋桨目标转速n
m_
target,论域为[0,1],根据螺旋桨目标转速,将船舶负荷分为较低负荷、低负荷、中等负荷、较优负荷和高负荷,p
ref
的模糊子集为{lower,low,medium,optimal,high},其隶属度函数采用梯形和三角形隶属度函数进行设计,磷酸铁锂电池组soc,论域为[0,1],根据soc对磷酸铁锂电池组使用寿命和效率的影响分为低、优和高三个部分,模糊子集为{low,optimal,high},利用梯形隶属度函数完成其隶属度函数设计,输出为气体机目标功率p
e
,论域为[0,1.1],将气体机分为低负荷、中等负荷、较优负荷和高负荷四个工况,其模糊子集为{low,medium,optimal,high},利用梯形和三角形隶属度函数完成其隶属度函数的设计;
[0013]
设计的模糊规则为:
[0014]
(a)在拖船航行过程中,混合动力系统时刻提供拖船所需功率,保证船舶的动力
性;
[0015]
(b)驾驶员对于船舶加速、减速的输入始终能实时控制螺旋桨的转速;
[0016]
(c)蓄电池soc保持在较优工作区;
[0017]
(d)混合动力系统工作时保证系统的效率最大化;
[0018]
(e)气体机工作在较高负荷区,避免低负荷燃烧恶化的问题。
[0019]
2、能量分配模块完成能量的分配,确定气体机的转速和扭永磁可逆电机的转速和扭矩;气体机的转速为螺旋桨目标转速n
e
=n_target,气体机扭矩等于气体机目标扭矩,t
e
=t
e
_target;永磁可逆电机的转速n
m
为气体机的实际转速n
e
_act,n
m
=n
e
_act,永磁可逆电机的扭矩t
m
为系统目标扭矩t_target与调节扭矩的和再减去气体机的目标扭矩,t
m
=t_target t_t
‑
t
e
_target。
[0020]
3、减速齿轮箱转速、扭矩合成:减速齿轮箱第一输入端和第二输入端输入的转速扭矩和输出端的转速扭矩存在以下关系:(m1n1 m2n2)η=m3n3,m3=(m1 m2)iη,其中m1、m2为离合器输入到齿轮箱的转矩,m3为齿轮箱输出到螺旋桨的转矩,n1、n2为气体机和电动机经离合器输入到齿轮箱的转速,n3为齿轮箱输出到螺旋桨的转速,η为齿轮箱工作效率,i表示齿轮箱的减速比。
[0021]
本发明的优势在于:本发明所述的气电混合动力船舶能量分配方法简单,现有的控制器可以满足其所需的计算速度,该方法可以有效的协调气体机和永磁可逆电机的动力输出,可以在满足螺旋桨转速闭环控制的基础上弥补气体机动态响应差的缺陷。
附图说明
[0022]
图1是本发明控制流程图;
[0023]
图2是本发明系统结构图;
[0024]
图3是本发明pref隶属度函数;
[0025]
图4是本发明soc隶属度函数;
[0026]
图5是本发明pe隶属度函数;
[0027]
图6是本发明模糊控制规则。
具体实施方式
[0028]
下面结合附图举例对本发明做更详细地描述:
[0029]
结合图1
‑
6,基于本发明方法的气电混合动力系统包括天然气发动机、永磁同步可逆电机、离合器1、离合器2、蓄电池组、减速齿轮箱和螺旋桨等设备,其中天然气发动机通过离合器1和减速齿轮箱机械连接,永磁同步可逆电机通过离合器2和齿轮箱机械连接,永磁同步可逆电机和蓄电池组进行电气连接,减速齿轮箱的输出端和螺旋桨进行直接机械连接。
[0030]
为解决气电混合动力船舶螺旋桨转速控制的能量分配问题,提出基于螺旋桨转速闭环的气电混合动力船舶能量分配方法,主要包括以下步骤:
[0031]
步骤1)通过pid计算模块计算调节扭矩t_t。
[0032]
步骤2)根据螺旋桨目标转速计算系统目标扭矩t_target。
[0033]
步骤3)通过模糊规则控制器,根据螺旋桨目标转速和蓄电池soc计算气体机目标扭矩n
e
_target。
[0034]
步骤4)通过能量分配模块分配气体机转速n
e
、扭矩t
e
和永磁同步可逆电机转速n
m
、t
m
扭矩。
[0035]
步骤5)减速齿轮箱转速、扭矩合成。
[0036]
调节扭矩t_t的计算
[0037]
调节扭矩t_t是利用螺旋桨目标转速和螺旋桨实际转速的偏差通过pid计算出来的。
[0038]
系统目标扭矩t_target的计算
[0039]
在稳态工况下,螺旋桨在推进特性曲线上工作,螺旋桨的需求功率与转速的三次方正比,p
ref
=kn3,根据扭矩计算公式t=9550p/n计算得到系统目标扭矩t_target=9550k(n
m
_target)2。
[0040]
通过模糊规则控制器计算气体机目标扭矩t
e
_target
[0041]
该模糊控制器包含两输入单输出,输入为螺旋桨目标转速n
m_
target,论域为[0,1],根据螺旋桨目标转速,将船舶负荷分为较低负荷、低负荷、中等负荷、较优负荷和高负荷,p
ref
的模糊子集为{lower,low,medium,optimal,high},其隶属度函数采用梯形和三角形隶属度函数进行设计,如附图3所示;磷酸铁锂电池组soc,论域为[0,1],根据soc对磷酸铁锂电池组使用寿命和效率的影响分为低、优和高三个部分,模糊子集为{low,optimal,high},利用梯形隶属度函数完成其隶属度函数设计,如附图4;输出为气体机目标功率p
e
,论域为[0,1.1],考虑气体机的负荷分布,将气体机分为低负荷、中等负荷、较优负荷和高负荷四个工况,其模糊子集为{low,medium,optimal,high},利用梯形和三角形隶属度函数完成其隶属度函数的设计,如附图5所示。
[0042]
设计的模糊规则为:
[0043]
1).在拖船航行过程中,混合动力系统应时刻提供拖船所需功率,保证船舶的动力性;
[0044]
2).驾驶员对于船舶加速、减速的输入应始终能实时控制螺旋桨的转速;
[0045]
3).蓄电池soc应保持在较优工作区,避免蓄电池的过充和过放;
[0046]
4).混合动力系统工作时应保证系统的效率最大化;
[0047]
5).气体机应工作在较高负荷区,避免低负荷燃烧恶化的问题。
[0048]
模糊规则的具体设计见附图6,在模糊推理过程中,and运算采用min算法,结论聚合采用max算法,去模糊化算法采用重心法。
[0049]
能量分配模块的分配方法
[0050]
能量分配模块完成最后能量的分配,确定了气体机的转速和扭永磁可逆电机的转速和扭矩。气体机的转速为螺旋桨目标转速n
e
=n_target,气体机扭矩等于气体机目标扭矩,t
e
=t
e
_target;永磁可逆电机的转速n
m
为气体机的实际转速n
e
_act,n
m
=n
e
_act,永磁可逆电机的扭矩t
m
为系统目标扭矩t_target与调节扭矩的和再减去气体机的目标扭矩,t
m
=t_target t_t
‑
t
e
_target。
[0051]
减速齿轮箱转速、扭矩合成
[0052]
减速齿轮箱输入端1和输入端2输入的转速扭矩和输出端的转速扭矩存在以下关
系,(m1n1 m2n2)η=m3n3,m3=(m1 m2)iη,其中m1、m2为离合器输入到齿轮箱的转矩,m3为齿轮箱输出到螺旋桨的转矩,n1、n2为气体机和电动机经离合器输入到齿轮箱的转速,n3为齿轮箱输出到螺旋桨的转速,η为齿轮箱工作效率,i表示齿轮箱的减速比。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

