一种用于rov水下对接的辅助牵引装置
技术领域
1.本发明涉及rov水下对接技术领域,尤其是一种用于rov水下对接的辅助牵引装置。
背景技术:
2.rov,即遥控无人潜水器,是用于水下观察、检查和施工的水下机器人。
3.水下平台通常采用搭载rov的方式拓展其作业能力,但是由于rov自身存储能力有限,所以在完成作业任务后rov需返回水下平台存储样品或更换工具,为实现这一目的必然面临着rov与水下平台的对接问题。在理想状态下,水下平台保持悬停定位状态,rov以适当的姿态缓慢地接近甲板面;当两者相对位置满足要求后,对接机构动作完成rov与水下平台的对接任务。但是,在工程应用中水下存在着复杂的水流,受其影响水下平台处于小范围的浮动状态而难以保持悬停位置不发生变化。在这种条件下,在rov与水下平台近距离接触后两者必然发生碰撞,轻则导致对接失败,重则导致设备损坏。
技术实现要素:
4.本技术人针对上述现有生产技术中的缺点,提供一种用于rov水下对接的辅助牵引装置,从而有效的解决对接过程中rov与水下平台甲板面的碰撞问题,通过操控rov和辅助牵引装置实现rov与水下平台甲板面的对接任务,动作灵敏,操作方便。
5.本发明所采用的技术方案如下:
6.一种用于rov水下对接的辅助牵引装置,包括与水下平台甲板连接的充油浮球牵引装置以及嵌入rov底部框架中的浮球对接机构,
7.所述充油浮球牵引装置的结构为:包括安装底座,所述安装底座的上表面间隔固定有支撑侧板,两个支撑侧板的顶面固定支撑顶板,所述支撑顶板的中心开有通孔,所述通孔穿过油管;两个支撑侧板上均开有轴孔,左侧的支撑侧板的轴孔内安装左挡板,右侧的支撑侧板的轴孔内安装右挡板,左挡板和右挡板之间安装卷筒,所述卷筒外部缠绕油管;位于左侧的支撑侧板的轴孔台阶面上安装液压缸,液压缸的活塞杆穿过左挡板后连接挡油板,挡油板位于卷筒的内部,且随着液压缸的活塞杆的伸缩,挡油板在卷筒内左右移动;位于右侧的支撑侧板轴孔台阶面上安装液压马达,液压马达的输出轴与右挡板回转轴连接;
8.还包括连接在油管头部过渡接头,所述过渡接头连接片弹簧,所述片弹簧的内部安装充油浮球,充油浮球内部填充有油液;
9.所述浮球对接机构的中部从上至下依次开有大圆柱面孔、圆锥孔、小圆柱面孔和喇叭口;
10.片弹簧伸入大圆柱面孔中。
11.其进一步技术方案在于:
12.所述左挡板和右挡板的截面均成“t”型结构,左挡板中部开有穿通孔。
13.所述卷筒、左挡板和右挡板安装在同一轴线位置,并绕轴线旋转。
14.所述油管一端通过油口接头与卷筒连接,油管另一端与过渡接头连接。
15.所述片弹簧采用一体式结构。
16.所述片弹簧的截面成多边形结构。
17.所述喇叭口导向片弹簧。
18.所述小圆柱面孔的直径大于细长状态下的片弹簧的最大径向尺寸。
19.大圆柱面孔的直径大于粗短状态的片弹簧的最大外形尺寸。
20.本发明的有益效果如下:
21.本发明结构紧凑、合理,操作方便,通过采用充油浮球牵引装置和浮球对接机构的互相配合工作,利用充油浮球和油管具有柔性特点,可避免了因对接碰撞对rov或水下平台造成的损伤;充油浮球和油管在水中具有正浮力,当水下平台甲板面倾斜时充油浮球和油管仍然可以保持竖直向上的状态,以便于完成对接动作;通过控制油液流动的方向,可远程操控片弹簧的动作以完成对接动作;对于rov只需安装简单的对接结构,不会增加额外的负担。
22.本发明主要用于辅助牵引rov进而实现与水下平台对接的目的。
附图说明
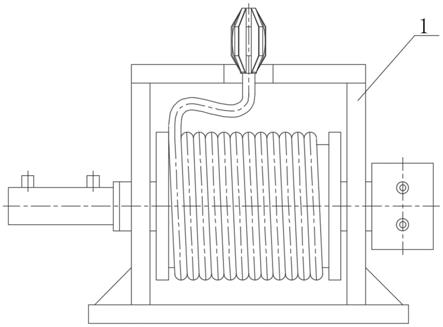
23.图1为本发明充油浮球牵引装置的主视图。
24.图2为本发明浮球对接机构的内部结构示意图。
25.图3为本发明充油浮球牵引装置的内部结构示意图。
26.图4为图3中a部的局部放大图。
27.图5为本发明对接过程的结构示意图(状态一)。
28.图6为本发明对接过程的结构示意图(状态二)。
29.图7为本发明回收状态的结构示意图。
30.其中:1、充油浮球牵引装置;2、浮球对接机构;
31.101、安装底座;102、支撑侧板;103、液压缸;104、左挡板;105、挡油板;106、支撑顶板;107、油管;108、右挡板;109、液压马达;110、油口接头;111、卷筒;112、片弹簧;113、充油浮球;114、油液;115、过渡接头;201、大圆柱面孔;202、圆锥孔;203、小圆柱面孔;204、喇叭口。
具体实施方式
32.下面结合附图,说明本发明的具体实施方式。
33.如图1
‑
图7所示,本实施例的用于rov水下对接的辅助牵引装置,包括与水下平台甲板连接的充油浮球牵引装置1以及嵌入rov底部框架中的浮球对接机构2,
34.充油浮球牵引装置1的结构为:包括安装底座101,安装底座101的上表面间隔固定有支撑侧板102,两个支撑侧板102的顶面固定支撑顶板106,支撑顶板106的中心开有通孔,通孔穿过油管107;两个支撑侧板102上均开有轴孔,左侧的支撑侧板102的轴孔内安装左挡板104,右侧的支撑侧板102的轴孔内安装右挡板108,左挡板104和右挡板108之间安装卷筒111,卷筒111外部缠绕油管107;位于左侧的支撑侧板102的轴孔台阶面上安装液压缸103,液压缸103的活塞杆穿过左挡板104后连接挡油板105,挡油板105位于卷筒111的内部,且随
着液压缸103的活塞杆的伸缩,挡油板105在卷筒111内左右移动;位于右侧的支撑侧板102轴孔台阶面上安装液压马达109,液压马达109的输出轴与右挡板108回转轴连接;
35.还包括连接在油管107头部过渡接头115,过渡接头115连接片弹簧112,片弹簧112的内部安装充油浮球113,充油浮球113内部填充有油液114;
36.浮球对接机构2的中部从上至下依次开有大圆柱面孔201、圆锥孔202、小圆柱面孔203和喇叭口204;
37.片弹簧112伸入大圆柱面孔201中。
38.左挡板104和右挡板108的截面均成“t”型结构,左挡板104中部开有穿通孔。
39.卷筒111、左挡板104和右挡板108安装在同一轴线位置,并绕轴线旋转。
40.油管107一端通过油口接头110与卷筒111连接,油管107另一端与过渡接头115连接。
41.片弹簧112采用一体式结构。
42.片弹簧112的截面成多边形结构。
43.喇叭口204导向片弹簧112。
44.小圆柱面孔203的直径大于细长状态下的片弹簧112的最大径向尺寸。
45.大圆柱面孔201的直径大于粗短状态的片弹簧112的最大外形尺寸。
46.本发明的具体结构和功能如下:
47.主要包括充油浮球牵引装置1和浮球对接机构2两大部分。
48.充油浮球牵引装置1安装于水下平台甲板面上,浮球对接机构2嵌入于rov底部框架中。
49.充油浮球牵引装置1主要由安装底座101、支撑侧板102、液压缸103、左挡板104、挡油板105、支撑顶板106、油管107、右挡板108、液压马达109、油口接头110、卷筒111、片弹簧112、充油浮球113、油液114和过渡接头115组成。
50.如图1和图3所示,一对支撑侧板102固定于安装底座101,支撑顶板106固定于支撑侧板102顶部,且支撑顶板106中心设计通孔用于油管107进出;左挡板104和右挡板108固定在卷筒111的两侧,左挡板104和右挡板108的回转轴安装在相应支撑侧板102的轴孔中,且卷筒111、左挡板104和右挡板108可绕轴线旋转;液压缸103安装在左侧支撑侧板102轴孔台阶面上,液压缸103的活塞杆与挡油板105连接,且随着液压缸103活塞杆的伸缩挡油板105可左右移动;液压马达109安装在右侧支撑侧板102轴孔台阶面上,液压马达109的出轴与右挡板108回转轴连接,且卷筒111、左挡板104和右挡板108可跟随液压马达109出轴的转动而旋转;油管107缠绕在卷筒111的外侧,油管107一端通过油口接头110与卷筒111连接,另一端与过渡接头115连接。
51.如图4所示,片弹簧112底部连接与过渡接头115连接,充油浮球113安装在片弹簧112内部且底部与过渡接头115连接;当充油浮球113收缩后,片弹簧112在自身弹力作用下恢复为细长状态,当充油浮球113收缩后膨胀后,片弹簧112受到挤压变为粗短状态。
52.如图3和图4所示,油液114充满于卷筒111、油管107和充油浮球113的内部;当液压缸103的活塞杆伸长后,挡油板105向右移动,部分油液114进入充油浮球113并使其膨胀,从而使片弹簧112变形为粗短状态;当液压缸103的活塞杆缩短后,挡油板105向左移动,部分油液114回流至卷筒111内部,充油浮球113收缩从而使片弹簧112恢复为细长状态。
53.在水下作业环境中,由于浮力的作用充油浮球113及油管107始终保持竖直向上的状态,随着液压马达109的转动充油浮球113向上或向下移动。
54.如图2所示,浮球对接机构2的中心孔由大圆柱面孔201、圆锥孔202、小圆柱面孔203和喇叭口204组成,喇叭口204用于导向片弹簧112,小圆柱面孔203直径应大于细长状态片弹簧112径向尺寸以使其通过,圆锥孔202用于定位粗短状态的片弹簧112,大圆柱面孔201直径应大于粗短状态片弹簧112外形尺寸从而避免阻碍其变形。
55.实际使用过程中:
56.如图5所示,在rov接近水下平台后,控制液压缸103回缩保证片弹簧112为细长状态,控制液压马达109转动释放油管107从而使充油浮球113向上移动,在充油浮球113位于合适高度后控制液压马达109停止转动;控制rov运动使喇叭口204与充油浮球113对齐,控制rov缓慢向下移动使片弹簧112通过小圆柱面孔203,之后控制rov保持悬停状态。
57.如图6所示,下一步控制液压缸103伸长使片弹簧112变形为粗短状态,控制液压马达109转动回收油管107,从而使片弹簧112底部与圆锥孔202接触。
58.如图7所示,进一步回收油管107使浮球对接机构2跟随充油浮球113向下移动,直至浮球对接机构2与支撑顶板106相接触,从而完成rov与水下平台的对接任务。
59.本发明工作可靠,操作方便,可以方便的完成rov水下的对接工作。
60.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

