1.本实用新型涉及潜航器技术领域,尤其涉及一种可收纳桅杆的双轴伺服系统。
背景技术:
2.探测桅杆是无人潜航器的一种探测设备,不工作时收入艇身随潜航器潜航;工作时,潜航器上浮到近水面,升起桅杆开始探测,减小航行阻力与噪音,提高隐秘性。综合探测桅杆可容纳多种探测设备,具备多功能综合探测的能力。
3.综合探测桅杆需要随无人潜航器适应深海潜航以及近水面工作环境,在密封、耐压、防腐方面有较高要求。无人潜航器的任务不同,综合探测桅杆的功能也有所差别,桅杆内搭载的任务负载甚至其外形结构也不一样。
4.综合探测桅杆一般由伺服系统、功能舱段以及综控系统组成。伺服系统是探测桅杆的主要部件,实现桅杆的展开、旋转与折叠;功能舱段容纳声光电、定位、通信等多种设备,是探测功能的必要组成;综控系统是探测桅杆的核心,控制综合桅杆正常工作。
5.广义上,综合探测桅杆系统还包括与之相匹配的地面指控系统,用于收发综合探测桅杆的指令及探测数据,有时该系统也集成进无人潜航器指控系统。
技术实现要素:
6.鉴于上述的分析,本实用新型旨在提供一种可收纳桅杆的双轴伺服系统,用以解决现有潜航器的桅杆不满足探测需求的问题。
7.本实用新型的目的主要是通过以下技术方案实现的:
8.本实用新型技术方案中,一种可收纳桅杆的双轴伺服系统,双轴伺服系统包括:
9.俯仰电机,输出端与可收纳桅杆的俯仰轴体连接;
10.航向电机,与俯仰电机固定连接;
11.航向轴体,与可收纳桅杆的舱体固定连接,并与航向电机的输出端固定连接;航向轴体的轴线与第二轴线重合。
12.本实用新型技术方案中,双轴伺服系统还包括:
13.俯仰减速器,设置于俯仰电机的输出端与俯仰轴体之间;
14.俯仰旋变装置,用于测量俯仰轴体转动的角度。
15.本实用新型技术方案中,俯仰减速器包括:
16.蜗杆,与俯仰电机的输出端动力连接;
17.蜗轮,与俯仰轴体固定连接,并与蜗杆啮合;
18.蜗杆支架,与俯仰电机固定连接,蜗杆与蜗杆支架铰接。
19.本实用新型技术方案中,双轴伺服系统还包括:
20.航向减速器,设置于航向电机的输出端与航向轴体之间;
21.航向旋变装置,用于测量航向轴体转动的角度。
22.本实用新型技术方案中,双轴伺服系统还包括:
23.辅助支撑轴,与俯仰轴体共轴,辅助支撑轴与潜航器铰接;俯仰电机位于辅助支撑轴与俯仰轴体之间。
24.本实用新型技术方案中,双轴伺服系统还包括:
25.伺服系统外壳,俯仰电机、航向电机、俯仰减速器、俯仰旋变装置、航向减速器和航向旋变装置均设置于伺服系统外壳内。
26.本实用新型技术方案中,航向轴体包括:
27.航向轴芯,与航向电机的输出端和舱体连接;
28.航向轴外壳,与航向电机固定连接,并与伺服系统外壳通过航向法兰固定连接。
29.本实用新型技术方案中,其中,航向轴芯和航向轴外壳之间通过第二动密封圈密封。
30.本实用新型技术方案中,双轴伺服系统还包括:
31.第四密封圈,设置于伺服系统外壳与伺服系统外壳之间。
32.本实用新型技术方案中,双轴伺服系统还包括:
33.第五密封圈,设置于航向轴芯与舱体之间。
34.本实用新型技术方案至少能够实现以下效果之一:
35.1、本实用新型能够同时满足无人潜航器航行的低阻力需求以及探测需求,具备折叠和展开功能,利于降低阻力,提升隐蔽性;
36.2、本实用新型能够进行俯仰轴0
‑
90
°
旋转,航向轴
±
176
°
旋转,探测范围大;
37.3、本实用新型的俯仰轴通过蜗轮蜗杆结构进行传动,具备断电自锁功能,锁止可靠,节约潜航器电能,保持桅杆相对艇身稳定;
38.4、本实用新型采用减重设计以及动、静多级密封冗余设计,可承受 1mpa压力水密,耐受海水腐蚀。
39.本实用新型中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本实用新型的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
40.附图仅用于示出具体实施例的目的,而并不认为是对本实用新型的限制,在整个附图中,相同的参考符号表示相同的部件。
41.图1为本实用新型实施例的整体示意图;
42.图2为本实用新型实施例的侧视图;
43.图3为本实用新型实施例的俯视图;
44.图4为本实用新型实施例在潜航器上收起状态示意图;
45.图5为本实用新型实施例在潜航器上伸出状态示意图;
46.图6为本实用新型实施例在潜航器上调整航向状态示意图;
47.图7为本实用新型实施例舱体旋转示意图;
48.图8为本实用新型实施例双轴伺服系统示意图;
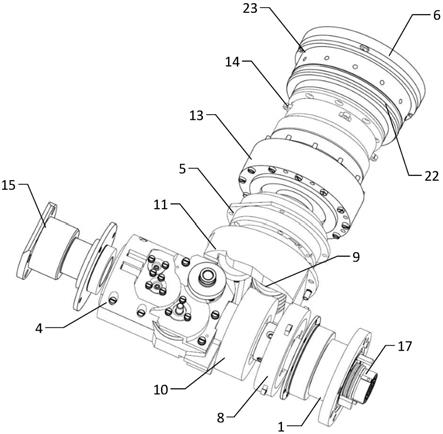
49.图9为本实用新型实施例双轴伺服系统内部结构示意图;
50.图10为本实用新型实施例舱段外壳结构示意图;
51.图11为本实用新型实施例第一双层密封结构示意图;
52.图12为本实用新型实施例第二双层密封结构示意图。
53.附图标记
54.1,俯仰轴体;2,潜航器;3,舱体;4,俯仰电机;5,航向电机;6,航向轴体;7,减重空间;8,俯仰旋变装置;9,蜗杆;10,蜗轮;11,蜗杆支架;12,舱段内壁;13,航向减速器;14,航向旋变装置;15,辅助支撑轴;16,伺服系统外壳;17,电信号接口;18,俯仰轴外壳;19,第一密封圈;20,第二密封圈;21,第三密封圈;22,航向轴芯;23,航向轴外壳;24,第一动密封圈;25,第二动密封圈;26,第四密封圈;27,第五密封圈;28,设备舱;29,光学舱;30,天线舱;31,光学舱外壳; 32,光学透镜;33,天线舱外壳;34,设备舱外壳;35,舱段外壁。
具体实施方式
55.下面结合附图来具体描述本实用新型的优选实施例,其中,附图构成本实用新型一部分,并与本实用新型的实施例一起用于阐释本实用新型的原理,并非用于限定本实用新型的范围。
56.在本实用新型实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接可以是机械连接,也可以是电连接可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
57.全文中描述使用的术语“顶部”、“底部”、“在
……
上方”、“下”和“在
……
上”是相对于装置的部件的相对位置,例如装置内部的顶部和底部衬底的相对位置。可以理解的是装置是多功能的,与它们在空间中的方位无关。
58.如图1至图12所示,本实用新型实施例提供了一种水下潜航器的综合桅杆系统,综合桅杆系统包括:俯仰轴体1,与潜航器2铰接,俯仰轴体1 包括第一轴线,通过俯仰轴体1,综合桅杆系统能够相对潜航器2进行俯仰摆动,从而在潜航器2航行时收入潜航器2内,在需要通过综合桅杆系统进行侦查拍摄等工作时,通过俯仰摆动能够将综合桅杆系统从潜航器2中伸出;舱体3,综合桅杆系统的功能性部件均设置在舱体3内,例如拍摄、信号的收发等;以及双轴伺服系统,与俯仰轴体1固定连接,并与舱体3 连接,包括第二轴线,第二轴线与第一轴线垂直;双轴伺服系统驱动综合桅杆系统绕第一轴线和第二轴线转动,通过双轴伺服系统能够实现综合桅杆系统的俯仰摆动以及舱体3的航向摆动,即使得舱体3既能够调整俯仰角度也能够调整航向角度。其中,俯仰轴体1与潜航器2铰接处通过第一双层密封结构密封;舱体3与双轴伺服系统铰接处通过第二双层密封结构密封。通过第一双层密封结构和第二双层密封结构的设置,能够提高本实用新型实施例的综合桅杆系统的密封性能,能够更加适应海水等高盐、高压、高腐蚀性的环境下的工作。
59.本实用新型一些可选的实施例中,双轴伺服系统包括:俯仰电机4,输出端与俯仰轴体1连接,用于驱动综合桅杆系统进行俯仰摆动;航向电机5,与俯仰电机4固定连接,用于驱动综合桅杆系统进行航向摆动;航向轴体6,与舱体3固定连接,并与航向电机5的输出端固定连接,当航向电机5的输出轴转动时,航向轴体6转动转动,带动舱体3转动;航向轴体6的轴线与第二轴线重合。
60.本实用新型一些可选的实施例中,双轴伺服系统还包括:俯仰减速器,设置于俯仰电机4的输出端与俯仰轴体1之间,用于调整俯仰电机4与俯仰轴体1之间的传动比,以实现俯仰角度0
‑
90
°
的调整;俯仰旋变装置8,用于测量俯仰轴体1转动的角度,并反馈给本实用新型实施例的综合桅杆系统的控制系统,形成反馈控制,使得本实用新型实施例的综合桅杆系统能够更加准确地对综合桅杆系统的俯仰角度进行控制。
61.本实用新型一些可选的实施例中,俯仰减速器包括:蜗杆9,与俯仰电机4的输出端动力连接;蜗轮10,与俯仰轴体1固定连接,并与蜗杆9啮合;蜗杆支架11,与俯仰电机4固定连接,蜗杆9与蜗杆支架11铰接。本实用新型实施例的俯仰电机4驱动蜗杆9转动,通过蜗轮蜗杆的减速传动,实现俯仰轴体1的转动,由于俯仰轴体1的旋转范围为0
‑
90
°
,蜗轮蜗杆可以实现大减速比的传动。
62.本实用新型一些可选的实施例中,双轴伺服系统还包括:航向减速器 13,设置于航向电机5的输出端与航向轴体6之间,用于调整航向电机5 与航向轴体6之间的传动比,以实现航向角度
±
176
°
的调整;航向旋变装置14,用于测量航向轴体6转动的角度,并反馈给本实用新型实施例的综合桅杆系统的控制系统,形成反馈控制,使得本实用新型实施例的综合桅杆系统能够更加准确地对综合桅杆系统的航向角度进行控制。
63.通过蜗轮蜗杆结构和大传动比的航向减速器13,使得在断电时,双轴伺服系统能够实现俯仰角度和航向角度的自锁,能够避免综合探测桅杆受海浪扰动而引起相对潜航器发生摆动、影响探测,同时,节约了设置电控制动器的空间、减少了设置制动器而引起的电能消耗。为了进一步提高自锁能力,在俯仰轴体1与航向轴体6处设置抱闸机构,并通过抱闸电机驱动抱闸机构,也可设置止挡机构,并通过止挡电机驱动止挡机构,通过抱闸机构和/或止挡机构来进一步提高双轴伺服系统的自锁能力。
64.此外,双轴伺服系统设有陀螺仪和/或加速度传感器,用于监测综合探测桅杆的运动状态,引入速度环控制,在一定程度上解耦海浪扰动,实现综合探测桅杆探测视场相对大地稳定。
65.本实用新型一些可选的实施例中,双轴伺服系统还包括:辅助支撑轴 15,与俯仰轴体1共轴,辅助支撑轴15与潜航器2铰接;俯仰电机4位于辅助支撑轴15与俯仰轴体1之间。通过设置辅助支撑轴15,使得综合桅杆系统与潜航器2之间在第一轴线方向存在两个铰接处,从而综合桅杆系统能够相对潜航器2进行稳定的转动,避免俯仰轴体1承受过大的弯矩而导致损坏。
66.本实用新型一些可选的实施例中,双轴伺服系统还包括:伺服系统外壳16,俯仰电机4、航向电机5、俯仰减速器、俯仰旋变装置8、航向减速器13和航向旋变装置14均设置于伺服系统外壳16内。伺服系统外壳16 能够保护内部的部件防止海水等高盐、高压、高腐蚀性物质对内部的部件造成损坏。
67.本实用新型一些可选的实施例中,俯仰轴体1穿过伺服系统外壳16;俯仰轴体1与伺服系统外壳16之间通过第一动密封圈24密封。在实际运转时,本实用新型实施例的俯仰轴体1相对伺服系统外壳16转动,而俯仰轴体1与潜航器2连接,使得综合桅杆系统能够相对潜航器2进行俯仰摆动,同时通过第一动密封圈24对俯仰轴体1与伺服系统外壳16之间的缝隙进行密封,防止异物进入对伺服系统外壳16内部的部件造成损坏。
68.本实用新型一些可选的实施例中,俯仰轴体1包括:电信号接口17,与潜航器2电连
接,作为综合桅杆系统与潜航器2的通信接口以及电力接口;俯仰轴外壳18,电信号接口17设置于俯仰轴外壳18内,电信号接口 17与俯仰轴外壳18铰接,由于俯仰轴外壳18与潜航器2固定连接,作为俯仰角度的动力部件之一,电信号接口17在会随综合桅杆系统一同转动,因此电信号接口17与俯仰轴外壳18铰接。
69.本实用新型一些可选的实施例中,第一双层密封结构包括:第一密封圈19,设置于电信号接口17与俯仰轴外壳18之间;第二密封圈20,设置于电信号接口17与潜航器2之间;第三密封圈21,设置于俯仰轴外壳18 与潜航器2之间。第三密封圈21是俯仰轴体1与潜航器2连接处的最外层密封结构,当第三密封圈21失效,即使有少量的液体进入俯仰轴体1与潜航器2连接处的缝隙,由于第一密封圈19和第二密封圈20的设置,能够防止液体进入到电信号接口17与潜航器2之间的电连接处,依然能够保证本实用新型实施例的正常运转,实现对俯仰轴体1与潜航器2连接处的双重密封。
70.本实用新型一些可选的实施例中,考虑到俯仰轴外壳18相对伺服系统外壳16转动,第一动密封圈24设置于俯仰轴外壳18与伺服系统外壳16 之间,用以实现俯仰轴外壳18与伺服系统外壳16之间的动密封。
71.本实用新型一些可选的实施例中,航向轴体6包括:航向轴芯22,与航向电机5的输出端和舱体3连接,用于传动,调整舱体3的航向角度;航向轴外壳23,与航向电机5固定连接,并与伺服系统外壳16通过航向法兰固定连接;其中,由于航向轴芯22会带动舱体3转动,而航向轴外壳23 会与伺服系统外壳16固定连接,因此,航向轴芯22和航向轴外壳23之间通过第二动密封圈25进行动密封。
72.本实用新型一些可选的实施例中,第二双层密封结构包括:第四密封圈26,设置于伺服系统外壳16与伺服系统外壳16之间;第五密封圈27,设置于航向轴芯22与舱体3之间。通过设置第四密封圈26与第五密封圈 27能够将航向轴体6与伺服系统外壳16以及舱体3之间的密封。
73.本实用新型一些可选的实施例中,舱体3沿垂直于第二轴线截面形状相同,整体成形接近于杆状的结构,且舱体3相对第二轴线的侧面至少部分地为回转体的一部分,用于减少在综合桅杆系统竖起工作时的水流阻力。当综合桅杆系统能够收入潜航器2内时,舱体3非回转体的部分可以与潜航器2的外壳仿形,减少综合桅杆系统在收起时的阻力。
74.本实用新型一些可选的实施例中,舱体3包括:设备舱28,与航向轴体6连接,作为综合桅杆系统的控制系统的主要舱室;光学舱29,用于拍摄图像,与设备舱28固定连接,作为拍摄设备的舱室;天线舱30,用于收发无线信号,与光学舱29固定连接,作为信号收发设备的舱室,位于整个舱体3的端部,方便信号的收发。
75.本实用新型一些可选的实施例中,光学舱29包括:光学舱外壳31,光学舱外壳31的侧壁开设有拍摄孔;光学透镜32,位于拍摄孔处;拍摄系统,位于光学舱外壳31内,拍摄系统的镜头与光学透镜32连接。拍摄系统的镜头通过光学透镜32来拍摄潜航器2周围的图像。
76.本实用新型一些可选的实施例中,天线舱30包括:天线舱外壳33,与光学舱外壳31固定连接;收发天线,位于天线舱外壳33内。通过收发天线,综合桅杆系统能够与外界进行无线信息交互,将拍摄获得的图像传输出去。
77.本实用新型一些可选的实施例中,设备舱28包括:设备舱外壳34,一端与光学舱外壳31固定连接,另一端与航向轴体6固定连接,综合桅杆系统的控制设备位于设备舱28中。
78.本实用新型一些可选的实施例中,设备舱外壳34和光学舱外壳31均为舱段外壳;舱段外壳包括:舱段外壁35;舱段内壁12,至少部分的舱段内壁12与舱段外壁35连接;其中,舱段内壁12和舱段外壁35之间设有减重空间7。光学舱29和设备舱28均位于综合桅杆系统中部,设备舱外壳 34和光学舱外壳31可以采用相同的结构,舱段内壁12的内部作为器件的安装空间,舱段内壁12和舱段外壁35之间的减重空间7,用来减少综合桅杆系统的重量,在同等能源条件下,提高潜航器2的续航能力。
79.本实用新型一些可选的实施例中,考虑到舱体3需要绕第二轴线进行航向转动,舱段内壁12为圆柱形结构,且舱段内壁12与航向轴体6同轴,使舱体3的航向转动更加顺滑。
80.本实用新型一些可选的实施例中,减重空间7与舱段外壁35的外侧连通,即减重空间7与舱段外壁35的外侧压力相等,可以适当减薄舱单外壁的厚度;减重空间7与舱段内壁12的内侧密封,舱段内壁12作为舱体3 的主要结构部件承受外力。
81.本实用新型一些可选的实施例中,舱段外壁35设有多个贯穿舱段外壁 35内外的通孔;减重空间7与舱段外壁35的外侧通过通孔连通。通孔不仅能够平衡减重空间7与舱段外壁35的外侧的压力,还能进一步减少舱段外壳的重量,进一步提高潜航器2的续航能力。
82.综上所述,本实用新型能够同时满足无人潜航器航行的低阻力需求以及探测需求,具备折叠和展开功能,利于降低阻力,提升隐蔽性;本实用新型能够进行俯仰轴0
‑
90
°
旋转,航向轴
±
176
°
旋转,探测范围大;本实用新型的俯仰轴通过蜗轮蜗杆结构进行传动,具备断电自锁功能,锁止可靠,节约潜航器电能,保持桅杆相对艇身稳定;本实用新型采用减重设计以及动、静多级密封冗余设计,可承受1mpa压力水密,耐受海水腐蚀。
83.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

