1.本实用新型涉及水质检测技术领域,尤其涉及一种水质监测用无人潜航器。
背景技术:
2.水是人类赖以生存的重要自然资源之一,其质量安全与人们的生产和生活息息相关,对人们的身体健康造成直接影响。目前我国不仅水资源短缺,分布不均,而且水污染现象严重,需要通过科学技术手段来提升治理效率、改善生态环境、实现可持续发展。水质监测工作在保护水资源、控制水污染、提升饮用水品质等方面扮演着关键角色。其主要衡量指标有ph值、电导率、氨氮、总磷、cdd、浊度等。目前污水水质检测系统是由污水排放监测点(图像站、水质站、流量站)、污水水质在线监测平台组成,可实现对企业废水、城市污水、农村污水、养殖业污水的自动采样、流量的在线监测和主要污染因子的在线监测以及现场情况的抓拍;实时掌握污水中污染物排放总量,实现监测数据自动传输;由监测点对水质参数自动采集、处理、保存和远程通讯传输,污水水质在线监测平台部署于云服务器上,对数据进行汇总、整理和综合分析。
3.目前海洋水体水质检测主要采用以下方式:现场采样船基或岸基实验室分析、浮标锚系传感器原位检测、走航连续仪器检测。走航连续仪器检测是将水样抽离原位、通过传感器或仪器自动检测的方法,比现场采样分析方法数据实时性高,节省人力和时间,维护成本比传感器原位检测方法低,数据质量更易于控制。且可方便搭载于科考船、商船或渔船上,从而覆盖全球大部分海洋,获取宝贵数据。但是对江、河、湖、海等水深大的区域进行水质检测时,随着水深度越大,采样越困难,不能够及时快速获取水质检测样品,不同深度的水域会出现酸碱度不同的情况,因此,对不同深度的水域进行检测,需要逐一采样,检测速度慢,过酸或是过碱的水会影响采样装置的正常工作,并且长时间使用会造成检测传感器被杂质包覆,检测精度不高。无人潜航器是指没有人驾驶、靠遥控或自动控制在水下航行的器具,主要指那些代替潜水员或载人小型潜艇进行深海探测、救生、排除水雷等高危险性水下作业的智能化系统,也可用于水质监测方面,因此无人潜航器也被称为潜水机器人或水下机器人。
4.本实用新型所要解决的技术问题在于克服现有的技术缺陷,提供一种水质监测用无人潜航器,该无人潜航器可以潜入深水处实现深度方向采集水样,可以根据需要增加或者更换检测传感模块,可以同时打开或者关闭一个或者几个传感器模块,并且本实用新型增加了过滤装置以及冲洗装置,使检测传感器保持清洁,确保检测传感器在长时间使用后检测精度仍然较高。另外,本实用新型的无人潜航器可以使螺旋桨得到保护,在水下不易被水草等杂物缠住。
技术实现要素:
5.本实用新型针对现有技术中无法从海水深度方向上采样,检测结果有一定的局限性,并且长时间使用会造成检测传感器被杂质包覆,检测精度不高等缺点,提供了一种水质
监测用无人潜航器,该无人潜航器可以潜入深水处实现深度方向采集水样,可以根据需要增加或者更换检测传感模块,可以根据需要同时打开或者关闭一个或者几个传感器模块,并且本实用新型增加了过滤装置以及冲洗装置,使检测传感器保持清洁,确保检测传感器在长时间使用后检测精度仍然较高。
6.为了解决上述技术问题,本实用新型通过下述技术方案得以解决:一种水
7.质监测用无人潜航器,包括潜航器本体,设置在所述潜航器本体前端的推进头,以及设置在潜航器本体尾部的螺旋桨,所述潜航器本体底面的前后两侧对称设置有配重块,所述潜航器本体内部依次设置有取样装置、分流装置、检测装置以及排水装置,分流装置内部设置有粉碎装置和过滤装置,所述分流装置上部设置有冲洗装置。在推进头、螺旋桨和配重块的共同动力作用下,无人潜艇器向前方和深水处行进和下潜,下潜到指定位置和深度后进行取样和检测,检测装置将检测结果发送到地面控制面板,最后将检测腔内的水样排出至水体。分流装置用于对抽取的水样分流至各个检测传感模块,粉碎装置和过滤装置将进入分流装置内的大体积杂质进行粉碎和过滤,最后通过排水装置排出至水体,使进入分流装置和各个检测传感器模块的水样纯净无杂质,冲洗装置用于对分流装置和各个检测传感器模块内部进行冲洗清洁,避免大颗粒杂质残留腐蚀装置内壁。
8.作为优选,所述推进头内部设置有电源模块,以及与所述电源模块相连的避障装置,所述避障装置包括探测针和避障传感器,所述推进头上部设置有摄像机。电源模块用于对整个装置进行供电,探测针用于探测前方是否有较大体积的障碍物,如果有障碍物,则避障传感器会将信号传输至地面控制面板,操作人员根据情况适时改变航行轨迹。摄像机为水下高清摄像机,可以将水下情况拍照上传至地面服务器,当某一处水质检测结果超标时,可以辅助检测人员对该处水质超标的原因进行分析判断,以找出具体污染源。
9.作为优选,所述检测装置包括与分流装置连接的5个传感器模块,5个所述的传感器模块依次为溶解氧检测传感模块、ph值检测传感模块、重金属检测传感模块、有机污染物检测传感模块、微生物检测传感模块。还可以根据不同地区、不同地理位置的水质的特点设置不同数量和精度的传感器类型,例如:盐度测量传感器、叶绿素测量传感器、温度测量传感器、电导率测量传感器、氨氮测量传感器、总磷测量传感器、cdd测量传感器、浊度测量传感器等。
10.作为优选,传感器模块的一端通过第一进水管道与所述分流装置连接,另一端与第一排水管道连接,所述传感器模块两端的第一进水管道和第一排水管道上均设置有电磁阀。抽取的水样经过分流装置流入各个传感器模块,电磁阀用于控制传感器模块的开启和关闭,如果只需要检测一个参数,则只需打开对应的一个电磁阀,如果需要检测5个参数,则需打开对应的5个电磁阀,传感器模块和电磁阀与外部控制面板相连,用户可以根据需要选择打开或者关闭任何一个传感器模块。
11.作为优选,所述取样装置设置在分流装置侧面下端,用于将所需样本提取到分流装置中,所述取样装置包括水泵以及连接所述水泵和分流装置的第二进水管道,所述第二进水管道上设有压力传感器。水泵连接电源模块和控制面板,打开水泵将所需位置的水样经过第二进水管抽入分流装置中。压力传感器是根据潜水器潜入水中的深度来计算出压力,从而定位潜水器潜入水下的深度,为操作人员的取样操作提供了依据。
12.作为优选,所述排水装置包括第一排水管道和第二排水管道,所述分流装置底部
设置有第二排水管道,第二排水管道上设置有电磁阀。第一排水管道与检测传感器模块连接,用于将检测完成的水样排出,第二排水管道与分流装置相连,用于将冲洗后的残余杂质从分流装置中排出。
13.作为优选,所述分流装置和过滤装置之间的空腔内设置有用于粉碎大颗粒杂质的粉碎装置,所述粉碎装置为旋转刀片。由于不同地理位置的水下状况不同,有一些大直径的水藻和悬浮物被抽进分流装置后会堵塞分流装置,进而堵塞检测传感器模块,为了避免这种情况,在分流装置和过滤装置之间设置了粉碎装置,将较大直径的杂质粉碎后,经过上部冲洗装置的冲洗,通过第二排水管道排出装置外部。
14.作为优选,所述冲洗装置包括依次连通的淡水箱、冲洗管道和电磁阀,所述冲洗管道靠近所述淡水箱的一端还连通固定有冲洗泵。若需要冲洗分流装置,在控制系统的作用下,冲洗泵和电磁阀打开,对分流装置内的杂质进行冲洗,消除附着在分流装置内壁上的杂质及腐蚀性物质,保护分流装置和检测传感器模块不被腐蚀。
15.作为优选,所述螺旋桨外部设置有网面保护罩。由于螺旋桨在水下容易被水草等杂物缠住,使得潜航仪无法返回,造成经济损失,因此设置网面保护罩使螺旋桨得到保护。
16.作为优选,所述取样装置、分流装置、检测装置、冲洗装置、粉碎装置以及排水装置均与电源模块和控制系统连接。
17.本实用新型由于采用了以上技术方案,具有以下显著的技术效果:
18.(1)该无人潜航器可以潜入深水处实现深度方向采集水样,
19.(2)可以根据需要增加或者更换检测传感模块,可以根据需要同时打开或者关闭一个或者几个传感器模块,
20.(3)本实用新型增加了过滤装置以及冲洗装置,使检测传感器保持清洁,确保检测传感器在长时间使用后检测精度仍然较高。
21.(4)本实用新型的无人潜航器可以使螺旋桨得到保护,在水下不易被水草等杂物缠住。
附图说明
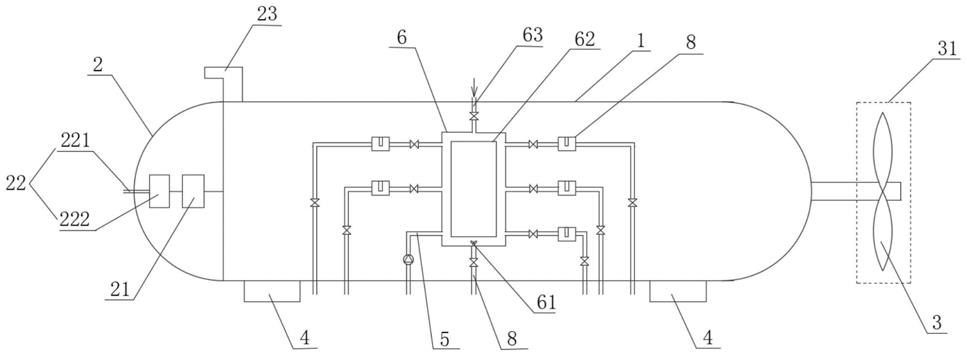
22.图1是本实用新型无人潜航器的整体结构示意图。
23.图2是本实用新型无人潜航器本体内部结构示意图。附图中各数字标号
24.所指代的部位名称如下:1
‑
本体;2
‑
推进头;21
‑
电源模块;22
‑
避障装置;221
‑
探测针;222
‑
避障传感器;23
‑
摄像机;3
‑
螺旋桨;31
‑
网面保护罩;4
‑
配重块;5
‑
取样装置;51
‑
水泵;52
‑
第二进水管道;53
‑
压力传感器; 6
‑
分流装置;61
‑
粉碎装置;611
‑
旋转刀片;62
‑
过滤装置;63
‑
冲洗装置;631
‑
淡水箱;633
‑
冲洗管道;7
‑
检测装置;71
‑
传感器模块;711
‑
溶解氧检测传感模块; 712
‑
ph值检测传感模块;713
‑
重金属检测传感模块;714
‑
有机污染物检测传感模块;715
‑
微生物检测传感模块;72
‑
第一进水管道;73
‑
电磁阀;
[0025]8‑
排水装置;81
‑
第一排水管道;82
‑
第二排水管道。
具体实施方式
[0026]
下面结合附图与实施例对本实用新型作进一步详细描述。
[0027]
如图1
‑
2所示,一种水质监测用无人潜航器,包括潜航器本体1,设置在潜航器本体
1前端的推进头2,以及设置在潜航器本体1尾部的螺旋桨3,潜航器本体1底面的前后两侧对称设置有配重块4,潜航器本体1内部依次设置有取样装置5、分流装置6、检测装置7以及排水装置8,分流装置6内部设置有粉碎装置61和过滤装置62,分流装置6上部设置有冲洗装置63。
[0028]
所述推进头2内部设置有电源模块21,以及与电源模块21相连的避障装置 22,避障装置22包括探测针221和避障传感器222,推进头2上部设置有摄像机23。
[0029]
所述检测装置7包括与分流装置6连接的5个传感器模块71,5个传感器模块依次为溶解氧检测传感模块711、ph值检测传感模块712、重金属检测传感模块713、有机污染物检测传感模块714、微生物检测传感模块715。
[0030]
所述传感器模块71的一端通过第一进水管道72与分流装置6连接,另一端与第一排水管道81连接,传感器模块71两端的第一进水管道72和第一排水管道81上均设置有电磁阀73。
[0031]
所述取样装置5设置在分流装置6侧面下端,用于将所需样本提取到分流装置6中,取样装置5包括水泵51以及连接水泵51和分流装置6的第二进水管道52,第二进水管道上设有压力传感器53。
[0032]
所述排水装置8包括第一排水管道81和第二排水管道82,所述分流装置6 底部设置有第二排水管道82,第二排水管道82上设置有电磁阀73。所述分
[0033]
流装置6和过滤装置62之间的空腔内设置有用于粉碎大颗粒杂质的粉碎装置61,所述粉碎装置61为旋转刀片611。
[0034]
所述冲洗装置63包括依次连通的淡水箱631、冲洗管道633和电磁阀73,所述冲洗管道633靠近所述淡水箱631的一端还连通固定有冲洗泵。
[0035]
所述螺旋桨3外部设置有网面保护罩31。
[0036]
所述取样装置5、分流装置6、检测装置7、冲洗装置63、粉碎装置61以及排水装置8均与电源模块21和控制系统连接。
[0037]
在推进头、螺旋桨和配重块的共同动力作用下,无人潜艇器向前方和深水处行进和下潜,下潜到指定位置和深度后进行取样和检测,传感器将检测结果发送到地面控制面板,最后将检测腔内的水样排出至水体。抽取的水样经过分流装置流入各个传感器模块,电磁阀用于控制传感器模块的开启和关闭,如果只需要检测一个参数,则只需打开对应的一个电磁阀,如果需要检测5个参数,则需打开对应的5个电磁阀,传感器模块和电磁阀与外部控制面板相连,用户可以根据需要选择打开或者关闭任何一个传感器模块。分流装置用于对抽取的水样分流至各个检测传感模块,粉碎装置和过滤装置将进入分流装置内的大体积杂质进行粉碎和过滤,最后通过排水装置排出至水体,使进入分流装置和各个检测传感器模块的水样纯净无杂质,冲洗装置用于对分流装置和各个检测传感器模块内部进行冲洗清洁,避免大颗粒杂质残留腐蚀装置内壁。
[0038]
以上实施方式仅用于说明本实用新型,而并非对本实用新型的限制,有关技术领域普通技术人员,在不脱离本实用新型精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属本实用新型的范畴,本实用新型专利保护范围应由权利要求限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

