1.本实用新型涉及一种海上平台甲板除锈与支援四足机器人,属于机械设计领域。
背景技术:
2.在海上油气田的开发过程中,移动或固定平台随着运行年限的增加以及受海洋特殊环境的影响,均产生了不同程度的内外腐蚀,严重的腐蚀容易使装备产生穿透性泄漏,进而造成环境污染、火灾、爆炸等危险;同时,腐蚀也大大降低了结构的强度,对平台局部乃至整体的安全构成威胁。为降低平台设施腐蚀程度及其所带来的风险,平台设施需要定期或不定期地进行除锈和喷涂作业。目前,该作业主要是通过人工完成,并存在作业难度大、风险高、劳动强度大、作业效率低、人力成本高等方面的问题。因此,平台现场迫切需要一种更为高效、安全的作业方式以代替人工作业。
3.传统单一机器人的模式很难满足平台现场的应用需求。本实用新型设计了一种四足除锈机器人结构,可在海上平台甲板表面爬行与除锈作业。同时,机器人具有较强的负重能力,还具备为垂直壁面爬行与作业机器人提供能源、牵引等方面的支援功能。
技术实现要素:
4.本实用新型设计了海上平台甲板除锈与支援四足机器人,机器人除具备在海上平台甲板上爬行与除锈作业外,还具备为垂直壁面爬行与作业机器人提供能源、牵引方面的支援功能。为实现上述目标,本实用新型采用以下技术方案:
5.海上平台甲板除锈与支援四足机器人整体由主体箱(b)、腿部组件(a)、机械臂式打磨组件(c)、物料箱(e)、卷扬机构(f)、承重滑轮架(g)组成。主体箱(b)是由9块铝合金板材用连接杆(6)和l型连接件(7)经过螺栓三(5)联接固定后组成,主体箱(b)有中间位置分为上下两层,上层可用来放置控制系统,下层可用来放置蓄电池;腿部组件(a)通过舵机法兰(10)、轴承(19)和螺栓一(1)将髋部结构(18)固定在主体箱(b)前背板和后方背板中间而固定;机械臂式打磨组件(c)安装在主体箱(b)上背板前方中间位置,机械臂式打磨组件(c)的旋转底座(8)通过联轴器(4)联接电机一(2),电机一(2)通过螺栓二(3)固定在主体箱(b)中间隔板下方;卷扬机构(f)安装在主体箱(b)上背板后方位置,通过螺栓三(5)固定;承重滑轮架(g)正对卷扬机构(f)安装在主体箱(b)后背板上,通过螺栓三(5)固定;物料箱(e)安装在机械臂式打磨组件(c)和卷扬机构(f)的中间位置,通过螺栓三(5)固定于主体箱(b)上背板;
6.四条机器人腿的腿部形状、结构及尺寸完全相同,腿部组件(a)主要由髋部结构(18)、大腿(16)、小腿(20)、舵机(11)和电磁吸附结构(21)组成,髋部结构(18)通过舵机法兰(10)、轴承(19)由螺栓一(1)固定在主体箱(b)前背板和后方背板中间,舵机(11)可控制髋部结构(18)的左右摆动实现机器人的横向移动;大腿(16)与髋部结构(18)是通过舵机法兰(10)、轴承(19)由螺栓一(1)联接固定;大腿(16)和小腿(20)之间也是通过舵机法兰(10)、轴承(19)和螺栓一(1)联接固定,舵机(11)控制大腿(16)和小腿(20)的旋转实现机器
人的前进和后退运动,其中大腿(16)和小腿(20)上的舵机(11)均是由螺栓四(14)固定;电磁吸附结构(21)包括沉头螺栓(22)、电磁铁(24)、弹簧(23),通过沉头螺栓(22)将电磁铁(24)固定在小腿(20)的底部,电磁铁(24)可在小腿(20)底部凹槽内随弹簧(23)的伸缩而移动;
7.卷扬机构(f)主要由卷扬机底座(26)、主动轮(27)、从动轮(25)、伺服电机(28)组成,伺服电机(28)通过联轴器(4)与主动轮(27)轴联接,由螺栓三(5)固定在卷扬机底座(26)上。在卷扬机构(f)上可缠绕电源线、物料管和安全绳等,可以对海上平台执行爬壁清洁作业的机器人提供物料和牵引保护的作用;
8.承重滑轮架(g)为滑轮支架(30)和三个定滑轮(29)组成的机构,滑轮支架(30)通过螺栓三(5)固定在主体箱(b)后背板上,三个定滑轮(29)通过螺栓三(5)固定在滑轮架上;
9.机械臂式打磨组件(c)主要包括电机一(2)、机械臂旋转底座(8)、主动臂(9)、从动臂(12)、舵机(11)、电机二(13)、联轴器(4)和打磨头(15),机械臂旋转底座(8)通过联轴器(4)与电机一(2)联接,电机一(2)由螺栓二(3)固定在主体箱(b)中间隔板下方;主动臂(9)和旋转底座(8)之间通过舵机法兰(10)、轴承(19)和螺栓一(1)联接固定;主动臂和从动臂之间也是通过舵机法兰(10)、轴承(19)和螺栓一(1)联接固定;打磨机构安装在从动臂(12)顶端,主要包括电机二(13)、打磨头(15)、联轴器(4),电机二(13)通过螺栓四(14)固定在从动臂(12)顶端;打磨头(15)和电机二(13)通过联轴器(4)联接,机械臂式打磨组件(c)上的三个舵机(11)均由螺栓四(14)联接固定。
10.与现有技术相比较,本实用新型具有以下优点:
11.1、所设计机器人具备较强的越障和较大的负载能力,运动灵活,对海上平台甲板复杂的工作环境有很好的适应性。
12.2、机器人足部依靠电磁吸附结构,使得机器人在运动过程中对海上平台甲板表面始终有一个较大的吸附力,从而克服了传统机器人在湿滑甲板壁面上的打滑问题。
13.3、所设计机器人主体使用铝合金板材,由舵机驱动腿部运动,再配合电机控制机械臂和卷扬机实现打磨、牵引和保护的功能,结构简单,经济适用,对于后期的维护保养工作也比较方便。
14.4、所设计机器人不仅可在海上平台甲板壁面爬行与打磨作业,还具备为垂直壁面爬行与作业机器人提供电源和牵引保护功能,实现了“一机多用”。
附图说明
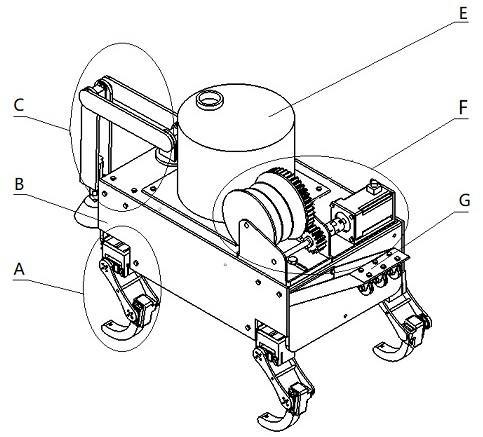
15.图1 机器人整体装配图
16.图2 主体箱内部结构图
17.图3 机器人腿部组件装配图
18.图4 机器人足底电磁吸附结构剖视图
19.图5 机械臂式组件结构装配图
20.图6 卷扬机构装配图
21.图7 承重滑轮架装配图
22.图中:a、腿部组件,b、主体箱,c、机械臂式打磨组件,e、物料箱,f、卷扬机构,g、承重滑轮架,1、螺栓一,2、电机一,3、螺栓二,4、联轴器,5、螺栓三,6、连接杆,7、l型连接件,8、
机械臂旋转底座,9、主动臂,10、舵机法兰,11、舵机,12,从动臂,13、电机二,14、螺栓四,15、打磨头,16、大腿,17、连接杆,18、髋部结构,19、轴承,20、小腿,21、电磁吸附结构,22、沉头螺栓,23、弹簧,24、电磁铁,25、从动轮,26、卷扬机底座,27、主动轮,28、伺服电机,29、定滑轮,30、滑轮支架, a—a局部剖面
具体实施方式
23.为了更好地描述清楚本实用新型的目的、功能以及具体设计方案,下面结合附图对本实用新型作进一步详细的描述,请参阅图1
‑
7。
24.海上平台甲板除锈与支援四足机器人整体由主体箱(b)、腿部组件(a)、机械臂式打磨组件(c)、物料箱(e)、卷扬机构(f)、承重滑轮架(g)组成。主体箱(b)是由9块铝合金板材用连接杆(6)和l型连接件(7)经过螺栓三(5)联接固定后组成,主体箱(b)有中间位置分为上下两层,上层可用来放置控制系统,下层可用来放置蓄电池;腿部组件(a)通过舵机法兰(10)、轴承(19)和螺栓一(1)将髋部结构(18)固定在主体箱(b)前背板和后方背板中间而固定;机械臂式打磨组件(c)安装在主体箱(b)上背板前方中间位置,机械臂式打磨组件(c)的旋转底座(8)通过联轴器(4)联接电机一(2),电机一(2)通过螺栓二(3)固定在主体箱(b)中间隔板下方;卷扬机构(f)安装在主体箱(b)上背板后方位置,通过螺栓三(5)固定;承重滑轮架(g)正对卷扬机构(f)安装在主体箱(b)后背板上,通过螺栓三(5)固定;物料箱(e)安装在机械臂式打磨组件(c)和卷扬机构(f)的中间位置,通过螺栓三(5)固定于主体箱(b)上背板;
25.四条机器人腿的腿部形状、结构及尺寸完全相同,腿部组件(a)主要由髋部结构(18)、大腿(16)、小腿(20)、舵机(11)和电磁吸附结构(21)组成,髋部结构(18)通过舵机法兰(10)、轴承(19)由螺栓一(1)固定在主体箱(b)前背板和后方背板中间,舵机(11)可控制髋部结构(18)的左右摆动实现机器人的横向移动;大腿(16)与髋部结构(18)是通过舵机法兰(10)、轴承(19)由螺栓一(1)联接固定;大腿(16)和小腿(20)之间也是通过舵机法兰(10)、轴承(19)和螺栓一(1)联接固定,舵机(11)控制大腿(16)和小腿(20)的旋转实现机器人的前进和后退运动,其中大腿(16)和小腿(20)上的舵机(11)均是由螺栓四(14)固定;电磁吸附结构(21)包括沉头螺栓(22)、电磁铁(24)、弹簧(23),通过沉头螺栓(22)将电磁铁(24)固定在小腿(20)的底部,电磁铁(24)可在小腿(20)底部凹槽内随弹簧(23)的伸缩而移动;
26.卷扬机构(f)主要由卷扬机底座(26)、主动轮(27)、从动轮(25)、伺服电机(28)组成,伺服电机(28)通过联轴器(4)与主动轮(27)轴联接,由螺栓三(5)固定在卷扬机底座(26)上;
27.在卷扬机构(f)上可缠绕电源线、物料管和安全绳等,可以对海上平台执行爬壁清洁作业的机器人提供物料和牵引保护的作用;
28.承重滑轮架(g)为滑轮支架(30)和三个定滑轮(29)组成的机构,滑轮支架(30)通过螺栓三(5)固定在主体箱(b)后背板上,三个定滑轮(29)通过螺栓三(5)固定在滑轮架上;
29.机械臂式打磨组件(c)主要包括电机一(2)、机械臂旋转底座(8)、主动臂(9)、从动臂(12)、舵机(11)、电机二(13)、联轴器(4)和打磨头(15),机械臂旋转底座(8)通过联轴器(4)与电机一(2)联接,电机一(2)由螺栓二(3)固定在主体箱(b)中间隔板下方;主动臂(9)
和旋转底座(8)之间通过舵机法兰(10)、轴承(19)和螺栓一(1)联接固定;主动臂和从动臂之间也是通过舵机法兰(10)、轴承(19)和螺栓一(1)联接固定;打磨机构安装在从动臂(12)顶端,主要包括电机二(13)、打磨头(15)、联轴器(4),电机二(13)通过螺栓四(14)固定在从动臂(12)顶端;打磨头(15)和电机二(13)通过联轴器(4)联接,机械臂式打磨组件(c)上的三个舵机(11)均由螺栓四(14)联接固定。
30.以上所述为本实用新型的一个实例,我们可对其机械结构进行一些变换或附带相应的检测或作业设备,应用于各种工程、工业现场。只要其机器人的机械结构设计思想同本实用新型所叙述的一致,均应视为本实用新型所包括的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

