技术特征:
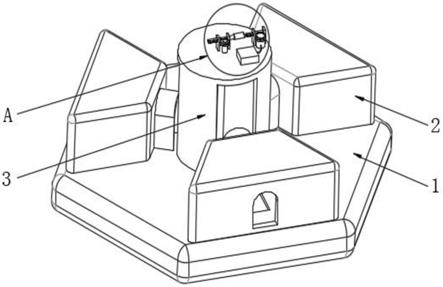
1.一种清洁机器人系统,包括清洁机器人,所述清洁机器人包括清洁机器人主体,所述清洁机器人主体内设置有尘盒,所述尘盒内设置有用于盛放垃圾的垃圾腔,其特征在于:所述清洁机器人主体上还设置有排尘口,所述排尘口设置为与所述垃圾腔相通的结构,所述排尘口的一侧设置有阀组件;所述阀组件包括触动件,所述触动件的外侧设置有套件,所述触动件位于所述套件内且设置为可在所述套件内移动的结构;所述阀组件还包括阀盖,所述阀盖设置为可旋转来开闭所述排尘口的结构,所述阀盖上设置有转轴部,所述转轴部上设置有旋转部,所述转轴部与所述旋转部位于不同轴线上;所述触动件上设置有安装部,至少所述旋转部的一部分位于所述安装部内,当所述触动件移动时带动所述旋转部绕所述转轴部旋转并同步带动所述转轴部来带动所述阀盖旋转。2.根据权利要求1所述的一种清洁机器人系统,其特征在于:所述转轴部与所述旋转部设置为相互平行的结构,且通过设置连接部相连,所述连接部的两端分别连接所述转轴部和所述旋转部,且所述连接部分别与所述转轴部和所述旋转部呈一角度相连。3.根据权利要求2所述的一种清洁机器人系统,其特征在于:所述触动件与所述套件之间设置有弹性件,所述弹性件可通过弹力带动所述触动件移动。4.根据权利要求3所述的一种清洁机器人系统,其特征在于:所述触动件上设置有杆部,所述杆部的一端设置有第一限位部,所述套件上设置有第二限位部,所述弹性件位于所述第一限位部与所述第二限位部之间,且所述弹性件套接在所述杆部上。5.根据权利要求1所述的一种清洁机器人系统,其特征在于:所述阀盖上设置有第一稳合部,所述第一稳合部的一侧设置有第二稳合部,且所述第一稳合部和/或所述第二稳合部设置为磁性结构,当所述阀盖关闭所述排尘口时所述第一稳合部与所述第二稳合部的位置对应。6.根据权利要求5所述的一种清洁机器人系统,其特征在于:所述第一稳合部位于所述转轴部上和/或所述旋转部上。7.根据权利要求1所述的一种清洁机器人系统,其特征在于:所述清洁机器人还包括上盖,所述阀盖安装于所述上盖上,所述阀盖的一侧设置有用于压接安装所述阀盖的压盖,所述排尘口位于所述压盖上。8.根据权利要求1所述的一种清洁机器人系统,其特征在于:所述清洁机器人还包括排尘通道,所述排尘通道位于所述尘盒与所述排尘口之间,所述排尘通道分别与所述垃圾腔和所述排尘口相连通。9.根据权利要求8所述的一种清洁机器人系统,其特征在于:所述清洁机器人上还设置有用于拖地清洁的清洁件,所述清洁件设置为水平旋转的结构或设置为可相对地面旋转滚动的结构,且所述清洁件位于所述排尘通道的下侧。10.根据权利要求1
‑
9任一项所述的一种清洁机器人系统,其特征在于:还包括集成站,所述集成站设置为相对所述清洁机器人为独立的部分,所述集成站用于所述清洁机器人的停靠,所述集成站上设置有与所述触动件位置对应的磁吸部,所述磁吸部设置为磁性结构,当所述清洁机器人停靠在所述集成站上时所述磁吸部通过磁力吸附所述触动件移动并带动所述阀盖旋转来打开所述排尘口。
技术总结
一种清洁机器人系统,包括清洁机器人,清洁机器人主体内设置有尘盒,尘盒内设置有用于盛放垃圾的垃圾腔,清洁机器人主体上还设置有排尘口,排尘口设置为与垃圾腔相通的结构,排尘口的一侧设置有阀组件;阀组件包括触动件,触动件的外侧设置有套件,触动件位于套件内且设置为可在套件内移动的结构;阀组件还包括阀盖,阀盖设置为可旋转来开闭排尘口的结构,阀盖上设置有转轴部,转轴部上设置有旋转部,转轴部与旋转部位于不同轴线上;触动件上设置有安装部,至少旋转部的一部分位于安装部内,当触动件移动时带动旋转部旋转并同步带动转轴部来带动阀盖旋转。本方案解决了现有的清洁机器人的排尘口需要准确对位、开闭稳定性较差的问题。问题。问题。
技术研发人员:高新忠 甘嵩 凡海洋 韦宜军 方恩光
受保护的技术使用者:曲阜信多达智能科技有限公司
技术研发日:2020.12.05
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。