反射模块和包括反射模块的相机模块
1.相关申请的交叉引用
2.本技术要求于2020年3月18日提交至韩国知识产权局的第10
‑
2020
‑
0033406号韩国专利申请和于2020年9月3日提交至韩国知识产权局的第10
‑
2020
‑
0112639号韩国专利申请的优先权的权益,上述韩国专利申请的全部公开内容出于所有目的通过引用并入本文。
技术领域
3.以下描述涉及反射模块和包括反射模块的相机模块。
背景技术:
4.相机模块目前在诸如智能电话的便携式电子设备中实现。便携式电子设备的厚度由于市场需求而减小,并且因此,期望相机模块的小型化。
5.除了相机模块的小型化的需求之外,还需要相机模块的性能改进。因此,诸如自动对焦调节、光学图像防抖等功能被添加到相机模块,因此在减小这种相机模块的尺寸方面存在限制。
6.也就是说,相机模块可能具有这样的问题,即,尽管需要小型化,但是很难减小相机模块的尺寸,因此,在减小包括相机模块的便携式电子设备的厚度方面可能存在限制。
7.近来,为了解决这种问题,已经提出了这样一种相机模块,其包括沿便携式电子设备的长度或宽度方向设置的多个透镜以及配置成改变光路的反射构件。这种相机模块具有用于通过旋转反射构件来校正抖动的结构,并且光可以以大于根据反射构件的旋转方向校正抖动所需的光的反射角的角度被反射。在这种情况下,由于光学图像防抖性能可能恶化,因此可能需要更精确地检测反射构件的位置。
技术实现要素:
8.提供本发明内容部分旨在以简要的形式介绍对发明构思的选择,而在下面的具体实施方式部分中将进一步描述这些发明构思。本发明内容部分目的不在于确认所要求保护的主题的关键特征或必要特征,也不籍此帮助确定所要求保护的主题的范围。
9.在一个总的方面,相机模块包括:透镜模块,包括沿光轴设置的多个透镜;壳体,容纳透镜模块;以及反射模块,设置在透镜模块的前方,并且包括配置成改变光路的反射构件以及其中安装有反射构件的支架。反射模块设置成绕垂直于光轴的第一轴和第二轴枢转。配置成感测反射模块相对于第一轴的位置变化的第一位置传感器设置在壳体中。配置成感测反射模块相对于第二轴的位置变化的第二位置传感器设置在壳体中。第一位置传感器的灵敏度不同于第二位置传感器的灵敏度。
10.第一轴可以形成在壳体的厚度方向上,并且第二轴可以形成在壳体的宽度方向上。第二位置传感器的灵敏度可以高于第一位置传感器的灵敏度。
11.第一位置传感器的灵敏度可以小于1.0mv/mt,并且第二位置传感器的灵敏度可以是1.0mv/mt或更高。
12.第一位置传感器的灵敏度可以小于1.0mv/mt,并且第二位置传感器的灵敏度可以是2.0mv/mt或更高。
13.第一轴可以形成在壳体的厚度方向上,并且第二轴可以形成在壳体的宽度方向上。第一位置传感器可以是霍尔传感器,以及第二位置传感器可以是隧道磁阻(tmr)传感器。
14.相机模块还可以包括:第一驱动部分,配置成使反射模块绕第一轴旋转;以及第二驱动部分,配置成使反射模块绕第二轴旋转。第一驱动部分可以包括设置在反射模块上的第一磁体和与第一磁体相对的第一线圈。第二驱动部分可以包括设置在反射模块上的第二磁体和与第二磁体相对的第二线圈。
15.第一磁体可以具有在第一轴的方向上具有长度的形状。第一磁体的与第一线圈相对的表面沿着光轴可以具有第一极、中性区以及第二极。
16.第一位置传感器可以设置成与第一磁体的中性区相对。
17.第二磁体可以具有在光轴的方向上具有长度的形状。第二磁体的与第二线圈相对的表面沿着第一轴可以具有第一极、中性区以及第二极。
18.第二位置传感器可以设置成与第二磁体的中性区相对。
19.第一磁体和第二磁体可以设置在支架的侧壁上。与第一磁体相比,第二磁体可以设置成更靠近透镜模块。
20.第一驱动部分可配置成在光轴的方向上产生驱动力。第二驱动部分可配置成在第一轴的方向上产生驱动力。
21.相机模块还可以包括:引导构件,设置在壳体和反射模块之间;第一球构件,设置在反射模块和引导构件之间,并且包括沿着第一轴设置的多个球构件;以及第二球构件,设置在壳体和引导构件之间,并且包括沿着第二轴设置的多个球构件。支架的侧壁可以沿光轴突出以覆盖引导构件。
22.在另一个总的方面,反射模块包括:反射构件,配置成改变光路;支架,安装有反射构件;壳体,容纳支架;第一驱动部分,包括设置在支架上的第一磁体和与第一磁体相对的第一线圈;以及第二驱动部分,包括设置在支架上的第二磁体和与第二磁体相对的第二线圈。支架可通过第一驱动部分绕第一轴旋转,并且可通过第二驱动部分绕垂直于第一轴的第二轴旋转。与第一磁体相对的第一位置传感器和与第二磁体相对的第二位置传感器设置在壳体中。第一位置传感器的灵敏度不同于第二位置传感器的灵敏度。
23.支架可配置成在左右方向之间绕第一轴枢转,并且可配置成在向上和向下方向之间绕第二轴枢转。第二位置传感器的灵敏度可以高于第一位置传感器的灵敏度。
24.第一位置传感器可以是霍尔传感器,以及第二位置传感器可以是隧道磁阻(tmr)传感器。
25.在另一个总的方面,电子设备包括相机模块。相机模块包括:透镜模块,包括沿光轴设置的多个透镜;壳体,容纳透镜模块;反射模块,配置成改变入射到反射模块的光的光路,并且设置成绕垂直于光轴的第一轴和第二轴枢转;第一位置传感器,设置在壳体中并且配置成感测反射模块相对于第一轴的位置变化;以及第二位置传感器,设置在壳体中并且配置成感测反射模块相对于第二轴的位置变化。第一位置传感器的灵敏度不同于第二位置传感器的灵敏度。
26.光可以在第一轴的方向上入射到反射模块,并且第一轴的方向可以对应于壳体的厚度方向。
27.第二轴的方向可以对应于壳体的宽度方向。第二位置传感器的灵敏度可以高于第一位置传感器的灵敏度。
28.第一位置传感器的类型可以不同于第二位置传感器的类型。
29.根据下面的具体实施方式、附图和所附权利要求,其它特征和方面将变得显而易见。
附图说明
30.图1是根据实施方式的配备有相机模块的便携式电子设备的立体图。
31.图2是根据实施方式的相机模块的示意性立体图。
32.图3a是沿线i
‑
i'截取的图2的截面图。
33.图3b是沿线ii
‑
ii'截取的图2的截面图。
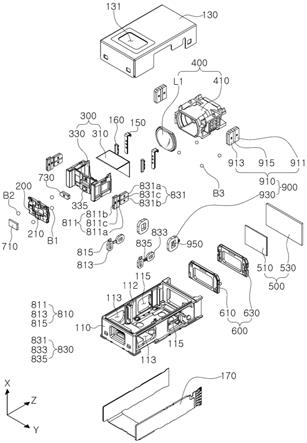
34.图4是根据实施方式的相机模块的示意性分解立体图。
35.图5是根据实施方式的设置在相机模块中的透镜的平面图。
36.图6是根据实施方式的相机模块的壳体、引导构件和反射模块的分解立体图。
37.图7是根据实施方式的相机模块的第一驱动部分和第二驱动部分的立体图。
38.图8a是第一磁体和第二磁体的侧视图,以及图8b是第一线圈和第二线圈的侧视图。
39.图9a至图9c是示意性地示出根据实施方式的反射模块绕作为旋转轴的第一轴(x轴)枢转的状态的图。
40.图10a至图10c是示意性地示出反射模块绕作为旋转轴的第二轴(y轴)枢转的状态的图。
41.图11是根据实施方式的反射模块的示意性分解立体图。
42.图12是根据实施方式的反射模块的示意性主视图。
43.图13是根据实施方式的相机模块的壳体和透镜模块的分解立体图。
44.图14是示出根据实施方式的从相机模块移除外壳的状态的立体图。
45.在整个附图和具体实施方式中,相同的附图标记指代相同的元件。出于清楚、说明和方便的目的,附图可能未按照比例绘制,并且附图中元件的相对尺寸、比例和描绘可能被夸大。
具体实施方式
46.提供以下具体实施方式以帮助读者获得对本技术中所描述的方法、装置和/或系统的全面理解。然而,本技术中所描述的方法、装置和/或系统的各种改变、修改和等同在理解本公开之后将是显而易见的。例如,本技术中所描述的操作的顺序仅仅是示例,并且除了必须以特定顺序发生的操作之外,不限于在本技术中所阐述的顺序,而是可以改变的,这在获得对本公开的理解之后将是显而易见的。另外,为了更加清楚和简洁,可省略对本领域中的公知内容的特征的描述。
47.本技术中所描述的特征可以以不同的形式实施,而不应被理解为受限于本技术中
所描述的示例。更确切地,已经提供了本技术中描述的示例,以使得本公开将是透彻和完整的,并将本公开的范围完全传达给本领域的普通技术人员。
48.应当注意,在本技术中,相对于实施方式或示例使用措辞“可以”(例如,关于实施方式或示例可以包括或实现的内容)意味着存在其中包括或实现这样的特征的至少一个实施方式或示例,而所有的实施方式和示例并不限制于此。
49.在整个说明书中,当诸如层、区域或基板的元件被描述为位于另一元件“上”、“连接到”或“联接到”另一元件时,该元件可直接位于该另一元件“上”、直接“连接到”或直接“联接到”另一元件,或者可存在介于该元件与该另一元件之间的一个或多个其它元件。相反地,当元件被描述为“直接位于”另一元件“上”、“直接连接到”或“直接联接到”另一元件时,则不存在介于该元件与该另一元件之间的其它元件。
50.如本技术中所使用的,措辞“和/或”包括相关联的所列项目中的任何一项以及任何两项或更多项的任何组合。
51.尽管在本技术中可以使用诸如“第一”、“第二”和“第三”的措辞来描述各种构件、部件、区域、层或部分,但是这些构件、部件、区域、层或部分不受这些措辞的限制。更确切地,这些措辞仅用于将一个构件、部件、区域、层或部分与另一个构件、部件、区域、层或部分区分开。因此,在不背离本技术中所描述的示例的教导的情况下,这些示例中提及的第一构件、第一部件、第一区域、第一层或第一部分也可以被称作第二构件、第二部件、第二区域、第二层或第二部分。
52.诸如“在
……
之上”、“较上”、“在
……
之下”和“较下”的空间相对措辞可以在本技术中为了描述便利而使用,以描述如附图中所示的一个元件相对于另一个元件的关系。除了涵盖附图中所描绘的定向之外,这些空间相对措辞旨在还涵盖设备在使用或操作中的不同的定向。例如,如果附图中的设备翻转,则描述为位于另一元件“之上”或相对于另一元件“较上”的元件将位于该另一元件“之下”或相对于该另一元件“较下”。因此,根据设备的空间定向,措辞“在
……
之上”涵盖“在......之上”和“在......之下”的两个定向。该设备还可以以其它方式定向(例如,旋转90度或在其它定向上),并且本技术中使用的空间相对措辞应被相应地解释。
53.本技术中使用的术语仅用于描述各种示例,而不用于限制本公开。除非上下文另有明确指示,否则冠词“一”、“一个”和“该”旨在也包括复数形式。措辞“包括”、“包含”和“具有”说明存在所述特征、数字、操作、构件、元件和/或它们的组合,但不排除一个或多个其它特征、数字、操作、构件、元件和/或它们的组合的存在或添加。
54.由于制造技术和/或公差,可出现附图中所示形状的变化。因此,本技术中描述的示例不限于附图中所示的具体形状,而是包括在制造期间出现的形状变化。
55.可以以在获得对本技术的公开内容的理解之后将显而易见的各种方式组合本技术中描述的示例的特征。此外,尽管本技术中描述的示例具有多种配置,但是在获得对本技术的公开内容的理解之后将显而易见的其它配置也是可行的。
56.图1是根据实施方式的配备有相机模块1000的便携式电子设备1的立体图。
57.参照图1,例如,相机模块1000可以安装在便携式电子设备1上,以拍摄对象的图像。便携式电子设备1可以是诸如移动通信终端、智能电话、平板pc等的便携式电子设备。
58.相机模块1000可以包括多个透镜。多个透镜的光轴(z轴)可以垂直于便携式电子
设备1的厚度方向(x轴方向,从便携式电子设备的前表面到后表面的方向,或与其相反的方向)。
59.例如,设置在相机模块1000中的多个透镜的光轴(z轴)可以形成在便携式电子设备1的宽度方向或长度方向上。
60.因此,即使当在便携式电子设备1中设置诸如自动对焦(在下文中称为af)、光学变焦(在下文中称为变焦)和光学图像防抖(在下文中称为ois)等功能时,也可以防止便携式电子设备1的厚度增加。因此,便携式电子设备1可以变薄。
61.相机模块1000可以具有af、变焦和ois功能中的任何一个或任何两个或更多个的任何组合。
62.由于包括af、变焦、ois功能等的相机模块需要设置有各种部件,与普通相机模块相比,相机模块的尺寸可以增加。当相机模块的尺寸增大时,可能难以减小安装有相机模块的便携式电子设备的厚度。
63.例如,相机模块可以包括用于变焦功能的多个透镜组。当多个透镜组沿着便携式电子设备的厚度方向设置时,便携式电子设备的厚度也可以根据透镜组的数量而增加。因此,当便携式电子设备的厚度不增加时,透镜组的数量可能不能充分保证,从而可能减弱变焦性能。
64.此外,为了在相机模块中实现af、变焦、ois功能等,可以安装配置成在光轴方向(z轴方向)或垂直于光轴方向的方向上移动多个透镜组的致动器。当透镜组的光轴(z轴)形成在便携式电子设备的厚度方向上时,用于移动透镜组的致动器也可以安装在便携式电子设备的厚度方向上。因此,便携式电子设备的厚度可能增加。
65.在相机模块1000中,由于多个透镜的光轴(z轴)可以布置成垂直于便携式电子设备1的厚度方向(x轴方向),因此即使当安装了具有af、变焦和ois功能的相机模块1000时,也可以使便携式电子设备1变薄。
66.图2是根据实施方式的相机模块1000的示意性立体图。图3a是沿线i
‑
i'截取的图2的截面图。图3b是沿线ii
‑
ii'截取的图2的截面图。
67.图4是根据实施方式的相机模块1000的示意性分解立体图。图5是根据实施方式的设置在相机模块中的透镜的平面图。
68.参照图2至图4,例如,相机模块1000可以包括壳体110、反射模块300、透镜模块400、图像传感器模块500和外壳130。
69.反射模块300、透镜模块400和图像传感器模块500可以从壳体110的一侧朝向壳体110的另一侧布置在由壳体110形成的内部空间中。壳体110可以提供内部空间以容纳反射模块300、透镜模块400和图像传感器模块500。在示例中,图像传感器模块500可以设置在壳体110的外部。
70.图2至图4示出了反射模块300、透镜模块400和图像传感器模块500可以布置在由壳体110形成的内部空间中的实施方式。可替代地,与图2至图4的实施方式不同,反射模块300可以设置在壳体110的外部,并且在这种情况下,壳体110的一侧可以打开以使从反射模块300透射的光通过。此外,反射模块300当设置在壳体110的外部时,可以容纳在单独的壳体中。
71.壳体110可以具有沿向上方向敞开的盒形状。
72.外壳130可以联接到壳体110以覆盖壳体110的上部部分。外壳130可以具有开口131,使得光通过该开口入射。通过外壳130的开口131入射的光的行进方向可以由反射模块300改变,并且可以入射到透镜模块400上。
73.反射模块300可以配置成改变光的行进方向。例如,入射到由壳体110形成的内部空间中的光的行进方向可以通过反射模块300改变为面对透镜模块400。
74.反射模块300可以包括反射构件310和其上安装有反射构件310的支架330。
75.反射构件310可配置成改变光的行进方向。例如,反射构件310可以是反射光的反射镜或棱镜。
76.通过外壳130的开口131入射的光的路径可以由反射模块300改变以面对透镜模块400。例如,沿着相机模块1000的厚度方向(x轴方向)入射的光的路径可以由反射模块300改变,以基本上与光轴方向(z轴方向)一致。
77.在反射模块300设置在壳体110外部的示例中,反射模块300还可以包括容纳支架330的单独的壳体,并且配置成向反射模块300提供驱动力的第一驱动部分或驱动组件810和第二驱动部分或驱动组件830可以设置在该单独的壳体中。
78.透镜模块400可以包括多个透镜以及容纳多个透镜的透镜镜筒410,行进方向已经由反射构件310改变的光通过多个透镜。
79.在图4中,为了便于描述,仅示出了多个透镜之中设置在最靠近物侧的透镜l1(在下文中称为第一透镜)。
80.图像传感器模块500可以包括图像传感器510和印刷电路板530。
81.图像传感器510可以通过接合线连接到印刷电路板530。
82.图像传感器模块500还可以包括红外截止滤光器。红外截止滤光器可以附接到壳体上。红外截止滤光器可以用于阻挡已经穿过透镜模块400的光之中的红外区域中的光。
83.基于透镜模块400,反射模块300可以设置在透镜模块400的前面(参考图2在左边),并且图像传感器模块500可以设置在透镜模块400的后面(参考图2在右边)。
84.多个透镜之中的至少一个透镜可以具有非圆形平面形状。例如,当从光轴方向(z轴方向)观察时,第一透镜l1可以是非圆形的。换句话说,第一透镜l1在垂直于光轴的平面(xy平面)中可以是非圆形的。多个透镜之中的所有透镜也可以具有非圆形平面形状。
85.参照图5,在垂直于光轴(z轴)的平面(xy平面)中,第一透镜l1可以具有在垂直于光轴(z轴)的第一轴方向(x轴方向)上的长度,该长度比在垂直于光轴(z轴)和第一轴方向(x轴方向)两者的第二轴方向(y轴方向)上的长度短。
86.例如,第一透镜l1可以具有长轴和短轴。短轴可以是在穿过光轴(z轴)的同时在第一轴方向(x轴方向)上连接第一透镜l1的两个侧表面的线段,以及长轴可以是在穿过光轴(z轴)的同时在第二轴方向(y轴方向)上连接第一透镜l1的两个侧表面的线段。长轴可以垂直于短轴,长轴的长度可以比短轴的长度长。
87.第一透镜l1可以包括光学部分10和凸缘部分30。
88.光学部分10可以是其中呈现第一透镜l1的光学性能的部分。例如,从对象反射的光可以穿过光学部分10,并且可以被折射。
89.光学部分10可以具有屈光力,并且可以具有非球面形状。
90.凸缘部分30可配置成将第一透镜l1固定到另一元件,例如透镜镜筒410或其它透
镜。
91.凸缘部分30可以从光学部分10延伸,并且可以与光学部分10一体地形成。
92.光学部分10可以形成为具有非圆形形状。例如,当在光轴方向(z轴方向)上观察时,光学部分10可以是非圆形的。参照图5,在垂直于光轴(z轴)的平面中,光学部分10可以具有在垂直于光轴(z轴)的第一轴方向(x轴方向)上的长度,该长度比在垂直于光轴(z轴)和第一轴方向(x轴方向)两者的第二轴方向(y轴方向)上的长度短。
93.光学部分10可以包括第一边缘11、第二边缘12、第三边缘13和第四边缘14。
94.当在光轴方向(z轴方向)(例如,在xy平面内)上观察时,第一边缘11和第二边缘12可以各自具有弧形形状。
95.第二边缘12可以设置在第一透镜l1的、与第一透镜l1的设置有第一边缘11的一侧相对的一侧上。此外,第一边缘11和第二边缘12可以被定位成相对于光轴(z轴)彼此相对。也就是说,第一边缘11和第二边缘12可以在y轴方向上的相对位置处彼此间隔开。
96.第四边缘14可以设置在第一透镜l1的、与第一透镜l1的设置有第三边缘13的一侧相对的一侧上。此外,第三边缘13和第四边缘14可以定位成相对于光轴(z轴)彼此相对。也就是说,第三边缘13和第四边缘14可以在x轴方向上的相对位置处彼此间隔开。
97.第三边缘13和第四边缘14可以分别将第一边缘11和第二边缘12彼此连接。第三边缘13和第四边缘14可以相对于光轴(z轴)对称,并且可以彼此平行地形成。
98.当在光轴方向(z轴方向)上观察时,第一边缘11和第二边缘12可以包括弧形,并且第三边缘13和第四边缘14可以大体上包括直的形状。
99.光学部分10可以具有长轴(a)和短轴(b)。短轴(b)可以是在穿过光轴(z轴)的同时以最短距离连接第三边缘13和第四边缘14的线段,以及长轴(a)可以是在穿过光轴(z轴)并垂直于短轴(b)的同时连接第一边缘11和第二边缘12的线段。长轴(a)的长度可以比短轴(b)的长度长。
100.凸缘部分30可以在第二轴方向(y轴方向)上沿着光学部分10的一部分的圆周延伸。凸缘部分30的至少一部分可以与透镜镜筒410的内表面接触。
101.凸缘部分30可以包括第一凸缘部分31和第二凸缘部分32。第一凸缘部分31可以从光学部分10的第一边缘11延伸,以及第二凸缘部分32可以从光学部分10的第二边缘12延伸。
102.光学部分10的第一边缘11可以是与第一凸缘部分31相邻的部分,以及光学部分10的第二边缘12可以是与第二凸缘部分32相邻的部分。
103.光学部分10的第三边缘13可以是光学部分10的其上没有形成凸缘部分30的一个侧表面,以及光学部分10的第四边缘14可以是光学部分10的其上没有形成凸缘部分30的另一个侧表面。
104.参照图4,在第一透镜l1中,在第一轴方向(x轴方向)上彼此面对的侧表面中的一个可以设置成面对壳体110的底表面,并且在第二轴方向(y轴方向)上彼此面对的侧表面可以设置成分别面对壳体110的内侧表面。
105.例如,在第一透镜l1中,在第一轴方向(x轴方向)上彼此面对的侧表面可以在壳体110的厚度方向(x轴方向)上间隔开,以及在第二轴方向(y轴方向)上彼此面对的侧表面可以在壳体110的宽度方向(y轴方向)上间隔开。
106.第一轴方向(x轴方向)可以是在壳体110的厚度方向(x轴方向)上形成的轴,以及第二轴方向(y轴方向)可以是在壳体110的宽度方向(y轴方向)上形成的轴。
107.由于第一透镜l1在第一轴方向(x轴方向)上的长度比第一透镜l1在第二轴方向(y轴方向)上的长度短,因此可以减小壳体110的厚度。
108.图6是根据实施方式的相机模块1000的壳体110、引导构件200和反射模块300的分解立体图。图7是根据实施方式的相机模块1000的第一驱动部分810和第二驱动部分830的立体图。图8a是第一磁体811和第二磁体831的侧视图,以及8b是第一线圈813和第二线圈833的侧视图。
109.图9a至图9c是示意性地示出反射模块300绕作为旋转轴的第一轴(x轴)枢转的状态的图。
110.图10a至图10c是示意性地示出反射模块300绕作为旋转轴的第二轴(y轴)枢转的状态的图。
111.参照图6,反射模块300和透镜模块400可以布置在由壳体110形成的内部空间中。壳体110可以设置有突出壁112。作为示例,突出壁112可以具有从壳体110的两个内侧表面突出的形状。
112.壳体110的内部空间可以由突出壁112分成其中设置有反射模块300的空间和其中设置有透镜模块400的空间。例如,反射模块300可以在光轴方向(z轴方向)上设置在突出壁112的前面,并且透镜模块400可以在光轴方向(z轴方向)上设置在突出壁112的后面。
113.反射模块300可以设置在壳体110的内部空间中,并且可以被拉向壳体110。例如,反射模块300可以在光轴方向(z轴方向)上被拉向壳体110的内侧表面。
114.为此,磁性材料可以分别设置在壳体110和反射模块300上。设置在壳体110和反射模块300上的磁性材料中的至少一个可以是磁体。例如,牵引轭710可以设置在壳体110上,并且牵引磁体730可以设置在反射模块300中。牵引轭710和牵引磁体730可以设置成在光轴方向(z轴方向)上彼此相对。牵引轭710可以是磁性材料。
115.因此,牵引轭710和牵引磁体730可以在光轴方向(z轴方向)上产生吸引力,并且因此,反射模块300可以被压向壳体110。
116.牵引轭710和牵引磁体730的安装位置可以互换。在另一实施方式中,牵引磁体730可以设置为多个牵引磁体,并且多个牵引磁体可以分别安装在壳体110和反射模块300上。
117.如图6所示,引导构件200可以设置在反射模块300的前面。引导构件200可以设置在壳体110的内侧表面和反射模块300之间。例如,引导构件200可以设置在壳体110的设置有牵引轭710的内侧表面和设置有牵引磁体730的反射模块300之间。
118.引导构件200可以具有板形状,并且可以具有通孔210,使得牵引轭710和牵引磁体730可以彼此直接相对。
119.壳体110的内侧表面可以包括在光轴方向(z轴方向)上突出的突出部111,并且突出部111可以设置在引导构件200的通孔210中(参见图3a)。牵引轭710可以设置在突出部111上。
120.由于牵引轭710和牵引磁体730可以设置成彼此相对,因此可以使牵引反射模块300的力最大化。此外,相机模块可以在光轴方向(z轴方向)上减小尺寸。
121.由于吸引力在光轴方向(z轴方向)上作用在牵引轭710和牵引磁体730之间,因此
反射模块300和引导构件200可以在光轴方向(z轴方向)上压向壳体110。
122.仍然参照图6,第一球构件b1可以设置在引导构件200和反射模块300之间,并且第二球构件b2可以设置在壳体110和引导构件200之间。
123.第一球构件b1可以包括在第一轴(x轴)上彼此间隔开的多个球构件,以及第二球构件b2可以包括在第二轴(y轴)上彼此间隔开的多个球构件。
124.由于牵引轭710和牵引磁体730之间的吸引力,第一球构件b1可以与引导构件200和反射模块300接触,并且第二球构件b2可以与壳体110和引导构件200接触。
125.其中容纳有第一球构件b1的容纳槽可以分别设置在彼此相对的、引导构件200的表面和反射模块300的表面上。例如,第一容纳槽335和第二容纳槽230可以分别设置在在光轴方向(z轴方向)上彼此相对的、反射模块300的表面和引导构件200的表面上,并且第一球构件b1可以设置在第一容纳槽335和第二容纳槽230之间。
126.第一容纳槽335和第二容纳槽230可以分别包括设置成在第一轴(x轴)上彼此间隔开的多个容纳槽。
127.其中容纳有第二球构件b2的容纳槽可以分别设置在彼此相对的、壳体110的表面和引导构件200的表面上。例如,第三容纳槽250和第四容纳槽117可以设置在在光轴方向(z轴方向)上彼此相对的、壳体110的表面和引导构件200的表面上,并且第二球构件b2可以设置在第三容纳槽250和第四容纳槽117之间。
128.第三容纳槽250和第四容纳槽117可以分别包括设置成在第二轴(y轴)上彼此间隔开的多个容纳槽。
129.相机模块1000可使反射模块300枢转以在拍摄图像时执行ois。
130.例如,当在拍摄图像期间发生抖动时,对应于抖动的相对位移可以被施加到反射模块300以执行ois。
131.反射模块300可以绕第一轴(x轴)和第二轴(y轴)枢转。例如,反射模块300可以相对于引导构件200在作为旋转轴的第一轴(x轴)上枢转。此外,反射模块300可以与引导构件200一起相对于壳体110在作为旋转轴的第二轴(y轴)上枢转。
132.第一球构件b1可以设置在引导构件200和反射模块300之间,并且第一球构件b1可以包括设置在第一轴(x轴)上的多个球构件。因此,反射模块300可以绕作为旋转轴的第一轴(x轴)枢转,同时由第一球构件b1支承(参见图9a至图9c)。
133.由于第一球构件b1可包括设置在第一轴(x轴)上的多个球构件,因此反射模块300可相对于引导构件200在作为旋转轴的第一轴(x轴)上枢转。可以限制反射模块300相对于引导构件200在作为旋转轴的第二轴(y轴)上枢转。
134.第二球构件b2可以设置在壳体110和引导构件200之间,并且第二球构件b2可以包括设置在第二轴(y轴)上的多个球构件。因此,引导构件200可在作为旋转轴的第二轴(y轴)上枢转,同时由第二球构件b2支承(参见图10a至图10c)。
135.由于第二球构件b2可包括设置在第二轴(y轴)上的多个球构件,所以引导构件200可相对于壳体110在作为旋转轴的第二轴(y轴)上枢转。可以限制引导构件200相对于壳体110在作为旋转轴的第一轴(x轴)上枢转。
136.在这种情况下,由于可以限制反射模块300相对于引导构件200在作为旋转轴的第二轴(y轴)上枢转,因此反射模块300可以相对于壳体110与引导构件200一起在作为旋转轴
的第二轴(y轴)上枢转。
137.驱动部分可以设置成使反射模块300枢转。例如,相机模块1000可以包括第一驱动部分810和第二驱动部分830,第一驱动部分810配置成使反射模块300在作为旋转轴的第一轴(x轴)上枢转,以及第二驱动部分830配置成使反射模块300在作为旋转轴的第二轴(y轴)上枢转(参见图4和图7)。
138.参照图4和图7,第一驱动部分810可以包括第一磁体811和第一线圈813。
139.第一磁体811可以安装在反射模块300上。例如,第一磁体811可以设置在支架330的侧壁上。
140.第一线圈813可以设置成在垂直于光轴方向(z轴方向)的方向上与第一磁体811相对。例如,壳体110可以设置有通孔113,第一线圈813设置在通孔113中,并且第一线圈813可以设置在通孔113中以在第二轴方向(y轴方向)上与第一磁体811相对。第一线圈813可以设置在联接到壳体110的基板170上(参见图4)。
141.第一磁体811可以包括设置在支架330的两个侧壁上的多个磁体,并且第一线圈813也可以包括与第一磁体811相对应的多个线圈。
142.参照图7,第一磁体811的面对第一线圈813的表面可以具有在光轴方向(z轴方向)上磁化的第一极性区811a和第二极性区811b。
143.例如,在第一磁体811的面对第一线圈813的表面上,第一极性区811a、中性区811c和第二极性区811b可以在光轴方向(z轴方向)上顺序布置。第一极性区811a可以是n极或s极,并且第二极性区811b可以是与第一极性区811a的极相反的极(s极或n极)。中性区811c可以设置在第一极性区811a和第二极性区811b之间。
144.第一磁体811和第一线圈813可以在与第一磁体811和第一线圈813彼此面对的方向垂直的方向上产生驱动力。例如,第一磁体811和第一线圈813可以在光轴方向(z轴方向)上产生驱动力。
145.因此,由于第一磁体811和第一线圈813的驱动力,反射模块300可以绕作为旋转轴的第一轴(x轴)枢转。
146.支架330的两个侧壁可以在光轴方向(z轴方向)上突出以覆盖引导构件200(参见图4和图6)。第一磁体811可以设置在支架330的突出为覆盖引导构件200的两个侧壁上。
147.第一磁体811的中性区811c可以在第二轴方向(y轴方向)上位于与第一球构件b1的中心相同的线上。可替代地,与第一球构件b1的中心相比,第一磁体811的中性区811c可以在光轴方向(z轴方向)上向前定位。因此,即使通过相对较小的驱动力,反射模块300也可以枢转。
148.参照图7,第二驱动部分830可以包括第二磁体831和第二线圈833。
149.第二磁体831可以安装在反射模块300上。例如,第二磁体831可以设置在支架330的侧壁上。
150.第二线圈833可以设置成在垂直于光轴方向(z轴方向)的方向上与第二磁体831相对。例如,壳体110可以设置有通孔113,第二线圈833设置在通孔113中,并且第二线圈833可以设置在通孔113中以在第二轴方向(y轴方向)上与第二磁体831相对。第二线圈833可以设置在联接到壳体110的基板170上(参见图4)。
151.第二磁体831可以包括设置在支架330的两个侧壁上的多个磁体,并且第二线圈
833也可以包括与第二磁体831相对应的多个线圈。
152.第二磁体831的面向第二线圈833的表面可以具有在垂直于光轴方向(z轴方向)的方向上磁化的第一极性区831a和第二极性区831b。
153.例如,在第二磁体831的面对第二线圈833的表面上,第一极性区831a、中性区831c和第二极性区831b可以在第一轴方向(x轴方向)上顺序布置。第一极性区831a可以是n极或s极,并且第二极性区831b可以是与第一极性区831a的极相反的极(s极或n极)。中性区831c可以设置在第一极性区831a和第二极性区831b之间。
154.第二磁体831和第二线圈833可以在与第二磁体831和第二线圈833彼此面对的方向垂直的方向上产生驱动力。例如,第二磁体831和第二线圈833可以在第一轴方向(x轴方向)上产生驱动力。
155.因此,由于第二磁体831和第二线圈833的驱动力,反射模块300可以在引导构件200上在作为旋转轴的第二轴(y轴)上枢转。
156.与第一磁体811相比,第二磁体831可以在光轴方向(z轴方向)上向后设置。例如,与第一磁体811相比,第二磁体831可以设置得更靠近透镜模块400。
157.第二球构件b2的中心与第二磁体831的中性区831c之间在光轴方向(z轴方向)上的间隔距离可以大于第二球构件b2的中心与第一磁体811的中性区811c之间在光轴方向(z轴方向)上的间隔距离。因此,即使通过相对较小的驱动力,反射模块300也可以枢转。
158.第一驱动部分810和第二驱动部分830可以在彼此垂直的各个方向上产生驱动力。
159.反射模块300可以绕作为旋转轴的第一轴(x轴)枢转(参见图9a、图9b和图9c),以及反射模块300和引导构件200可以一起绕作为旋转轴的第二轴(y轴)枢转(参见图10a、图10b和图10c)。例如,反射模块300可以绕作为旋转轴的第一轴(x轴)在左右方向之间枢转,并且可以绕作为旋转轴的第二轴(y轴)在向上方向和向下方向之间枢转。
160.在这种情况下,参照图4以及图9a至图10c,相机模块1000可包括可装配到壳体110的突出壁112的止动件150。
161.止动件150可以设置成具有钩状形状,并且可以设置成其钩状部分可以与突出壁112的上部部分接合并由突出壁112的上部部分保持的状态。
162.止动件150可限制反射模块300的枢转范围。
163.缓冲构件160可附接到止动件150。缓冲构件160可以由具有弹性的材料制成。因此,当反射模块300与止动件150碰撞时,可以减小冲击和噪声。
164.参照图7和图8a,第一磁体811在光轴方向(z轴方向)上的长度可以比第二磁体831在光轴方向(z轴方向)上的长度短。此外,第一磁体811在第一轴方向(x轴方向)上的长度可以比第二磁体831在第一轴方向(x轴方向)上的长度长。
165.例如,第一磁体811的第一极性区811a、中性区811c和第二极性区811b可以形成为在第一轴方向(x轴方向)上伸长,以及第二磁体831的第一极性区831a、中性区831c和第二极性区831b可以形成为在光轴方向(z轴方向)上伸长。
166.参照图7和图8b,第一线圈813在光轴方向(z轴方向)上的长度可以比第二线圈833在光轴方向(z轴方向)上的长度短。此外,第一线圈813在第一轴方向(x轴方向)上的长度可以比第二线圈833在第一轴方向(x轴方向)上的长度长。
167.例如,第一线圈813具有在第一轴方向(x轴方向)上的长度大于在光轴方向(z轴方
向)上的宽度的形状,以及第二线圈833具有在光轴方向(z轴方向)上的长度大于在第一轴方向(x轴方向)上的宽度的形状。
168.相机模块1000可以使用闭环控制方法,其感测并反馈反射模块300的位置。
169.因此,可以设置第一位置传感器815和第二位置传感器835来感测反射模块300的位置。
170.第一位置传感器815可以设置在壳体110上,并且可以设置成与第一磁体811相对。第二位置传感器835可以设置在壳体110上,并且可以设置成与第二磁体831相对。
171.第一位置传感器815和第二位置传感器835的类型可以不同。作为示例,第一位置传感器815可以是霍尔传感器,以及第二位置传感器835可以是隧道磁阻(tmr)传感器。
172.第一位置传感器815可以设置在第一线圈813的外部。例如,与第一线圈813相比,第一位置传感器815可以在第一轴方向(x轴方向)上向上设置。
173.第一位置传感器815可以设置成与第一磁体811的中性区811c相对。第一位置传感器815可以设置成与第一磁体811的中性区811c相对,并且甚至与第一磁体811的第一极性区811a的一部分和第二极性区811b的一部分相对。
174.第二位置传感器835可以设置在第二线圈833的外部。例如,与第二线圈833相比,第二位置传感器835可以在光轴方向(z轴方向)上向前设置。第二位置传感器835可以设置在第一线圈813和第二线圈833之间。
175.第二位置传感器835可以设置成与第二磁体831的中性区831c相对。第二位置传感器835可以设置成与第二磁体831的中性区831c相对,并且甚至与第二磁体831的第一极性区831a的一部分和第二极性区831b的一部分相对。
176.当反射模块300绕作为旋转轴的第一轴(x轴)枢转时,第一位置传感器815可以感测反射模块300的位置,并且当反射模块300绕作为旋转轴的第二轴(y轴)枢转时,第二位置传感器835可以感测反射模块300的位置。也就是说,第一位置传感器815可以感测反射模块300绕第一轴(x轴)的旋转位置,并且第二位置传感器835可以感测反射模块300绕第二轴(y轴)的旋转位置。
177.在这种情况下,第一位置传感器815的灵敏度可以不同于第二位置传感器835的灵敏度。例如,第二位置传感器835的灵敏度可以大于第一位置传感器815的灵敏度。
178.当反射模块300绕作为旋转轴的第一轴(x轴)枢转时,反射构件310的反射表面312的倾斜角可以不改变。当反射模块300绕作为旋转轴的第二轴(y轴)枢转时,反射构件310的反射表面312的倾斜角可以改变。
179.例如,当反射模块300绕作为旋转轴的第二轴(y轴)枢转时,光的反射角可以增加。因此,当第一位置传感器815的灵敏度和第二位置传感器835的灵敏度相同时,可能难以感测反射模块300的精确位置。
180.因此,相机模块1000可配置成使得第二位置传感器835的灵敏度大于第一位置传感器815的灵敏度,以感测反射模块300的精确位置,并改善ois性能。
181.第一位置传感器815可以具有小于1.0mv/mt的灵敏度。第二位置传感器835可以具有1.0mv/mt或更高的灵敏度。可替代地,第二位置传感器835可以具有2.0mv/mt或更高的灵敏度。例如,可以通过在室温(例如,25℃)下将输入电压设置为3v来测量位置传感器的灵敏度。
182.图11是反射模块300的示意性分解立体图。图12是反射模块300的示意性主视图。
183.参照图11和图12,反射模块300可以包括反射构件310和其上安装有反射构件310的支架330。
184.反射构件310可配置成改变光的行进方向。在该实施方式中,反射构件310可以是棱镜,但也可以是反射镜。
185.反射构件310可以具有通过在对角线方向上分割矩形平行六面体或规则立方体而获得的形状,并且可以包括入射表面311、反射表面312和发射表面313。反射构件310可以包括三个(3)矩形表面和两个(2)三角形表面。例如,反射构件310的入射表面311、反射表面312和发射表面313可以是矩形,并且反射构件310的侧表面314和315可以是大致三角形。
186.由于连接入射表面311和发射表面313的边缘具有尖锐的形状,因此可能存在由于冲击而损坏的风险。当连接入射表面311和发射表面313的边缘由于冲击而损坏时,可能由于光的非预期反射而引起耀斑现象。
187.因此,可以在反射构件310的入射表面311和发射表面313连接的边缘处设置倒角,以防止由于冲击等而对反射构件310造成损坏。
188.例如,倒角可以形成为相对于入射表面311和发射表面313具有预定角度。倒角和入射表面311之间的角度以及倒角和发射表面313之间的角度可以是钝角。
189.遮光层371和372可以设置在发射表面313上。例如,遮光层371和372可以设置在发射表面313的邻近入射表面311的部分上和/或发射表面313的邻近反射表面312的部分上。
190.例如,遮光层371和372可以设置在发射表面313的上边缘和/或下边缘上。
191.遮光层371和372可以通过将遮光膜附着到发射表面313或者在发射表面313上涂覆遮光涂料来形成。
192.不是所有穿过发射表面313的光都可以用于图像形成,并且由于没有用于图像形成的光可能会出现耀斑现象。因此,可以设置发射表面313上的遮光层371和372以阻挡不必要的光。
193.即使当不必要的光由遮光层371和372阻挡时,光也可以从遮光层371和372的边缘反射。在这种情况下,仍可能发生耀斑现象。
194.因此,在该实施方式中,遮光层371和372的边缘可以具有弯曲的形状。例如,遮光层371和372的边缘可以具有波形形状。因此,即使当光从遮光层371和372的边缘反射时,反射的光也可以被散射以防止耀斑现象。
195.支架330可以包括分别覆盖反射构件310的侧表面的第一侧壁331和第二侧壁332。第一侧壁331可以设置成覆盖反射构件310的一个侧表面314,并且第二侧壁332可以设置成覆盖反射构件310的另一个侧表面315。
196.此外,支架330可以包括安装表面333,反射构件310安装在该安装表面333上。安装表面333可以设置在第一侧壁331和第二侧壁332之间,并且安装表面333可以是倾斜表面。
197.例如,安装表面333可以是相对于多个透镜的光轴(z轴)倾斜约45
°
的倾斜表面。反射构件310的反射表面312可联接到支架330的安装表面333。
198.已经穿过入射表面311的光可以从反射表面312反射,并且可以穿过发射表面313。
199.当已经穿过入射表面311的光从反射表面312以外的部分(例如,反射构件310的侧表面314和315)反射时,可能引起耀斑现象。
200.此外,由于不是所有从反射表面312反射的光都用于图像形成,因此即使当光从反射表面312反射时,没有用于图像形成的光也可能引起耀斑现象。
201.相机模块1000配置成使得支架330覆盖反射构件310的发射表面313的一部分,以防止由于不必要的光而发生耀斑现象。支架330可以包括配置成覆盖反射构件310的发射表面313的一部分的盖部分。盖部分可以包括第一盖部分340和第二盖部分350。
202.第一盖部分340可以在垂直于光轴(z轴)的方向(例如,在第二轴方向(y轴方向))上从第一侧壁331延伸,并且第二盖部分350可以在垂直于光轴(z轴)的方向(例如,在第二轴方向(y轴方向))上从第二侧壁332延伸。例如,第一盖部分340和第二盖部分350可以布置成在第二轴方向上朝向彼此延伸。
203.第一盖部分340和第二盖部分350可以分别覆盖反射构件310的发射表面313的部分。
204.作为示例,第一盖部分340可以设置成覆盖发射表面313的连接到反射构件310的一个侧表面314的一部分,并且第二盖部分350可以设置成覆盖发射表面313的连接到反射构件310的另一个侧表面315的一部分。
205.第一盖部分340和第二盖部分350可以具有这样的形状,其中覆盖反射构件310的发射表面313的区域朝着壳体110的底表面增加。
206.第一盖部分340和第二盖部分350可以分别具有彼此相对的表面341和351。表面341和351可以分别是弯曲的。
207.表面341和351可各自包括有不平坦部分或遮光层以散射光。作为示例,不平坦部分可以是通过腐蚀处理形成为粗糙的表面,并且遮光层可以通过将遮光膜附着到第一盖部分340和第二盖部分350彼此相对的表面上或将遮光涂料涂覆到该表面上来形成。
208.由于不必要的光可以由第一盖部分340和第二盖部分350阻挡,并且光可以由设置在第一盖部分340和第二盖部分350彼此相对的表面341和351上的不平坦部分散射,因此可以抑制耀斑现象。
209.盖部分还可以包括第三盖部分360。第三盖部分360可以设置成覆盖反射构件310的发射表面313的一部分。例如,第三盖部分360可以设置成覆盖发射表面313的与反射构件310的反射表面312连接的一部分。
210.第三盖部分360可以配置成将第一盖部分340和第二盖部分350彼此连接,并且可以在垂直于光轴(z轴)的方向(例如,第一轴方向(x轴方向))上从支架330的安装表面333的端部延伸。
211.第三盖部分360可以包括多个突出部361。多个突出部361可以布置成彼此连接,以形成波形图案。可以在多个突出部361上设置遮光层。遮光层可以通过将遮光膜附着到多个突出部361或在多个突出部361上涂覆遮光涂料来形成。
212.由于不必要的光可以由第三盖部分360阻挡,并且光可以由第三盖部分360的多个突出部361散射,因此可以抑制耀斑现象。
213.如上所述,相机模块1000可以包括在反射构件310的发射表面313的上边缘、下边缘、左边缘和右边缘上的遮光结构,以防止由不必要的光引起的耀斑现象。
214.图13是根据实施方式的相机模块1000的壳体110和透镜模块400的分解立体图。
215.参照图4和图13,反射模块300和透镜模块400可以设置在壳体110的内部空间中。
反射模块300可以设置在壳体110的突出壁112的前面,并且透镜模块400可以设置在壳体110的突出壁112的后面。
216.透镜模块400可以在光轴方向(z轴方向)上移动以执行对焦调节。第三球构件b3可以设置在透镜模块400和壳体110之间,并且透镜模块400可以由第三球构件b3引导以在光轴方向(z轴方向)上移动。
217.第一引导槽411和第二引导槽119可以设置在透镜模块400和壳体110在第一轴方向(x轴方向)上彼此相对的表面上。第一引导槽411和第二引导槽119可以在光轴方向(z轴方向)上伸长。
218.第三球构件b3可以设置在第一引导槽411和第二引导槽119之间,并且可以沿着第一引导槽411和第二引导槽119滚动。
219.因此,当在光轴方向(z轴方向)上产生驱动力时,透镜模块400可以由第三球构件b3引导并且可以在光轴方向(z轴方向)上移动。
220.可以设置第三驱动部分900以在光轴方向(z轴方向)上移动透镜模块400(参见图4)。
221.第三驱动部分900可以包括第三磁体910和第三线圈930。
222.第三磁体910可以安装在透镜模块400上。作为示例,第三磁体910可以设置在透镜模块400的侧表面上。
223.第三线圈930可以设置成在垂直于光轴方向(z轴方向)的方向上与第三磁体910相对。例如,壳体110可以包括其中设置有第三线圈930的通孔115,并且第三线圈930可以设置在通孔115中以在第二轴方向(y轴方向)上与第三磁体910相对。第三线圈930可以设置在联接到壳体110的基板170上。
224.第三磁体910可以包括设置在透镜模块400的两个侧表面上的多个磁体,并且第三线圈930也可以包括与第三磁体910相对应的多个线圈。
225.第三磁体910的面向第三线圈930的表面可以具有在光轴方向(z轴方向)上磁化的第一极性区911和第二极性区913。
226.例如,在第三磁体910的面对第三线圈930的表面上,第一极性区911、中性区915和第二极性区913可以在光轴方向(z轴方向)上顺序布置。第一极性区911可以是n极或s极,并且第二极性区913可以是与第一极性区911的极相反的极(s极或n极)。中性区915可以设置在第一极性区911和第二极性区913之间。
227.第三磁体910和第三线圈930可以在与第三磁体910和第三线圈930彼此相对的方向垂直的方向上产生驱动力。例如,第三磁体910和第三线圈930可以在光轴方向(z轴方向)上产生驱动力。
228.因此,由于第三磁体910和第三线圈930的驱动力,透镜模块400可以在光轴方向(z轴方向)上移动。
229.相机模块可以使用感测和反馈透镜模块400的位置的闭环控制方法。
230.因此,可以设置第三位置传感器950来感测透镜模块400的位置。
231.第三位置传感器950可以设置在形成于第三线圈930中心的中空部分中。第三位置传感器950可以是霍尔传感器。
232.第三位置传感器950可以设置成与第三磁体910的中性区915相对。第三位置传感
器950也可以设置成与第三磁体910的中性区915相对,并且与第三磁体910的第一极性区911的一部分和第二极性区913的一部分相对。
233.图14是示出从相机模块1000移除外壳130的状态的立体图。
234.相机模块1000可以包括反射模块300、透镜模块400和图像传感器模块500。反射模块300、透镜模块400和图像传感器模块500可以沿光轴方向(z轴方向)布置。
235.因此,其行进方向由反射模块300改变的光可以穿过透镜模块400以进入图像传感器510。
236.当在光进入图像传感器510之前发生非预期的反射时,可能发生耀斑现象。例如,当穿过透镜模块400的光在到达图像传感器510之前被照射到壳体110的底表面或外壳130的内表面(与壳体110的底表面相对的表面)并从壳体110的底表面或外壳130的内表面反射时,可能发生耀斑现象。例如,由于在透镜模块400和图像传感器510之间的分离空间中产生的内反射,可能发生耀斑现象。
237.相机模块1000可以包括遮光部分600,以防止由于光的非预期反射而引起的耀斑现象。遮光部分600可以设置在透镜模块400和图像传感器模块500之间的空间中。因此,即使在发生光的非预期反射时,也可以通过遮光部分600防止散射和反射的光入射到图像传感器510上,以抑制耀斑现象。
238.遮光部分600可以包括至少一个遮光板。遮光部分600可以包括例如两个(2)遮光板。
239.例如,遮光部分600可以包括第一遮光板610和第二遮光板630。第一遮光板610和第二遮光板630可以沿光轴方向(z轴方向)布置。
240.第一遮光板610和第二遮光板630中的每一个可以具有开口形状的窗口w,穿过透镜模块400的光通过该窗口w进入图像传感器510。
241.用于图像形成的光可以穿过窗口w并进入图像传感器510,并且可以引起耀斑现象的光可以由第一遮光板610和第二遮光板630阻挡。
242.由于难以精确地预测从由壳体110形成的内部空间散射和反射的光,因此仅由一个(1)遮光板构成的遮光部分可能不足以阻挡不必要的光。
243.由于遮光部分600包括多个遮光板,与仅包括一个(1)遮光板的结构相比,可以更有效地抑制耀斑现象。
244.参照图3a,第一遮光板610的窗口的内壁和第二遮光板630的窗口的内壁可以分别包括倾斜表面。
245.例如,第一遮光板610的窗口的内壁和第二遮光板630的窗口的内壁可以包括具有相同倾斜方向的倾斜表面。
246.第一遮光板610的窗口的内壁和第二遮光板630的窗口的内壁可以分别包括倾斜表面,以在光行进的方向上扩展窗口w的尺寸(例如,面积)。
247.例如,在第一遮光板610的窗口w中,一侧的尺寸可以小于另一侧的尺寸。此外,在第二遮光板630的窗口w中,一侧的尺寸可以小于另一侧的尺寸。
248.在这种情况下,一侧可以是面对透镜模块400的一侧,而另一侧可以是面对图像传感器模块500的一侧。
249.第一遮光板610的窗口w的另一侧的尺寸可以大于第二遮光板630的窗口w的一侧
的尺寸。
250.即使当光从第一遮光板610的表面和/或第二遮光板630的表面反射并进入图像传感器510时,也可能引起耀斑现象。
251.因此,第一遮光板610的表面和第二遮光板630的表面可各自包括不平坦部分以散射光。
252.第一遮光板610的表面和第二遮光板630的表面可以分别由不平坦部分粗糙地形成。例如,第一遮光板610的表面和第二遮光板630的表面可以形成为比壳体110的表面更粗糙。
253.作为示例,第一遮光板610的表面和第二遮光板630的表面可以分别被腐蚀以被粗糙化。
254.遮光层可以分别设置在第一遮光板610的表面上和第二遮光板630的表面上,以阻挡不必要的光。例如,与壳体110的表面相比,第一遮光板610的表面和第二遮光板630的表面可以具有更低的反射率。例如,遮光层可以具有黑色颜色。
255.根据本技术公开的实施方式,反射模块和包括该反射模块的相机模块可以精确地感测该反射模块的位置。
256.虽然上面已经示出和描述了具体的示例,但是在理解本公开之后将显而易见的是,在不背离权利要求及其等同方案的精神和范围的情况下,可对这些示例作出形式和细节上的各种改变。本技术中所描述的示例仅以描述性的意义进行理解,而非出于限制的目的。对每个示例中的特征或方面的描述应被认为是可适用于其它示例中的相似的特征或方面。如果以不同的顺序执行所描述的技术,和/或如果以不同的方式组合和/或通过其它部件或它们的等同件替换或补充所描述的系统、架构、设备或电路中的部件,则仍可实现适当的结果。因此,本公开的范围不由具体实施方式限定,而是由权利要求及其等同方案限定,且在权利要求及其等同方案的范围之内的所有变型应被理解为包括在本公开中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
