1.本发明涉及将密封剂施加到充气轮胎的内腔的表面的方法和系统。
背景技术:
2.众所周知,充气轮胎包括环状胎体,其具有两个环形胎圈并支撑环形胎面。在壳体和胎面之间插入有胎面带束层,该胎面带束层包括多个胎面帘布层。在胎体帘布层内布置有内衬层,该内衬层是气密的,构成内衬层并且具有将空气保持在充气轮胎内的功能,以随着时间的推移保持充气轮胎自身的充气压力。
3.近年来,充气轮胎的发展已经指向具有内衬层的充气轮胎,该内衬层用旨在密封任何穿孔的密封剂制造。通常,密封剂具有高粘度,以确保与任何穿孔相关的密封作用及其在内腔内的稳定性,而不管充气轮胎的状况如何。
4.将密封剂施加到预硫化的充气轮胎上,并且优选地施加到充气轮胎的与道路接触的区域(或充气轮胎的可能发生穿孔的区域)内的内衬层。特别地,密封剂施加在胎面处并且至少部分地施加在侧壁处。
5.通常,用于施加密封剂的处理提供了预硫化充气轮胎在框架上的定位,在框架上以防止充气轮胎自身的任何侧向平移的方式通过侧向轨道阻挡预硫化充气轮胎。
6.响应于操作员命令,通过将密封剂施加器装置插入充气轮胎的内腔中直接面向内腔自身的表面的位置来开始密封剂施加处理。施加器装置通过设置在喷嘴一端的可移动臂方便地实现,并且旨在将基本上均匀的密封剂珠粒施加到腔的内表面。特别地,施加器装置旨在通过在内腔的两个侧向端部之间的往复移动来施加密封剂珠粒;特别地,臂在垂直于充气轮胎的赤道面的平面内移动。借助于电动辊,通过支撑件使充气轮胎旋转;臂的移动(连续的或替代地步进的)与充气轮胎的旋转相结合,实现密封剂的施加,密封剂的施加必须尽可能均匀。事实上,密封剂具有高比重,并且即使施加到充气轮胎的内表面的密封剂的量的小变化也可能导致充气轮胎的重量的显著变化,从而导致充气轮胎的总质量的不平衡(即,偏心)。已经观察到,已知的和当前使用的施加系统不能获得关于施加到内腔表面的密封剂的厚度的提高的均匀性,即,施加到内腔表面的密封剂的厚度可能在区域之间存在明显的变化。
技术实现要素:
7.因此,本发明的目的是提供一种用于将密封剂施加到充气轮胎的内腔的表面的方法,该方法没有现有技术的缺点,并且特别是实现容易且便宜。
8.因此,本发明的另一目的是提供一种用于将密封剂施加到充气轮胎的内腔的表面的系统,该系统没有现有技术的缺点,并且特别是制造容易且便宜。
9.根据本发明,提供根据所附权利要求确定的用于将密封剂施加到充气轮胎的内腔的表面的方法和系统。
附图说明
10.现在参考附图描述本发明,附图示出了若干非限制性示例性实施例,其中:
11.图1是已经实现用于将密封剂施加到充气轮胎的内腔的表面的系统的示意性前视图,其中为了清楚起见移除了一些部件;
12.图2是图1的系统的示意图,其中为了清楚起见移除了一些部件;以及
13.图3示意性地示出了图1的系统的控制单元,其实现了根据本发明布置的用于将密封剂施加到充气轮胎的内腔的表面的方法。
具体实施方式
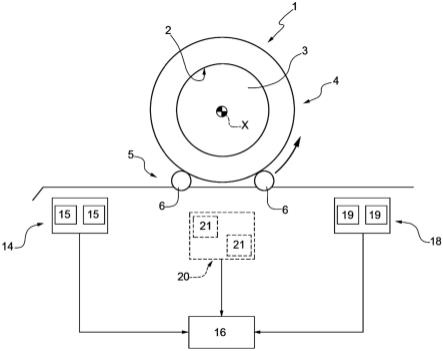
14.参考图1,附图标记1整体上表示用于将密封剂施加到充气轮胎4的内腔3的表面2的系统1。应当理解,短语“充气轮胎4的内腔3的轮廓”是指充气轮胎4的表面轮廓。
15.充气轮胎4布置在框架5上,框架5适于通过电动辊6支撑充气轮胎4并使充气轮胎4围绕其中心x轴旋转。框架5被设计成使充气轮胎4以基本上恒定的速度(并且优选地在1m/min和15m/min之间)旋转。优选地,充气轮胎4以防止充气轮胎4自身在围绕x轴的旋转移动期间的任何侧向平移的方式容纳在框架5内。
16.如图1所示,系统1包括密封剂施加器装置7,该密封剂施加器装置7通过具有臂8的机器人方便地实现,臂8可移动并且旨在将基本上均匀的密封剂珠粒施加到表面2。
17.施加器装置7旨在通过在内腔3的两个侧向端部之间的往复移动施加密封剂珠粒;特别地,臂8在与充气轮胎4的赤道面基本正交的平面中移动。框架5围绕轴x的旋转和臂8的移动实现了具有螺旋前进的施加。更具体地,施加器装置7旨在将密封剂珠粒施加在充气轮胎4的旨在与道路接触的部分处,即,在胎面处,并且至少部分地在侧壁处。
18.施加器装置7连接到密封剂供应回路9,密封剂供应回路9包括罐10、导管11和泵送装置12,罐10优选地由金属材料制成并且容纳密封剂,导管11优选地被加热并且源自罐10并与施加器装置7液压连通,泵送装置12从罐10提取密封剂并且在压力下将密封剂供应到施加器装置7。
19.根据优选变型,施加器装置7通过喷嘴13来实现,以进行半流体状态的密封剂的非接触式施加;喷嘴13优选地布置在可移动臂8的一个轴向端部处。
20.施加器装置7以使得喷嘴18和表面5之间的距离基本恒定的方式实现。应该强调的是,通过保持喷嘴18和表面5之间的距离基本恒定,就珠粒的厚度和宽度以及密封剂施加区域的精度而言,可以实现更均匀的施加。
21.根据第一实施例,在框架5的上游设置有称重站14,称重站14包括多个载荷传感器15,其中各个载荷传感器15包括连接到控制单元16的已知类型的测量装置,控制单元16继而包括信号处理装置17。信号处理装置17以在施加密封剂之前接收来自载荷传感器15的指示充气轮胎4的重量的信号的方式配置。
22.在框架5的上游设置有另一称重站18,称重站18继而包括多个载荷传感器19,其中各个载荷传感器19包括连接到控制单元16的已知类型的测量装置。信号处理装置17以在施加密封剂之后接收来自载荷传感器19的指示充气轮胎4的重量的信号的方式配置。
23.根据第二实施例,对应于框架5的位置,设置有称重站20,称重站20包括多个载荷传感器21,其中各个载荷传感器21包括连接到控制单元16的已知类型的测量装置。信号处
理装置17以这样的方式配置:接收来自载荷传感器21的指示在施加密封剂之前充气轮胎4的重量的信号和指示在施加密封剂之后轮胎4的重量的信号这两者。
24.因此,在这两个实施例中,信号处理装置17以这样的方式实现:根据在施加密封剂之后的充气轮胎4的重量与在施加密封剂之前的充气轮胎4的重量之间的差来计算施加的密封剂的量。
25.与施加到各个充气轮胎4的密封剂的量相关的数据(根据施加密封剂之后各个充气轮胎4的重量与施加密封剂之前同一充气轮胎4的重量之间的差计算)存储在控制单元16内的存储缓冲器23内的一维阵列22或短期矢量内。短期矢量22定义短期存储缓冲器24。
26.重要的是要强调,要施加的密封剂的量可以根据充气轮胎4的参考特征(特别是根据尺寸/大小)而变化。根据第一变型,多个短期矢量22存储在短期存储缓冲器24内,其中各个短期矢量22对应于不同类型的充气轮胎4,由此可以施加由系统1处理的密封剂层。
27.根据第二优选变型,与可以施加由系统1处理的密封剂层的所有不同类型的充气轮胎4有关的数据被存储在短期存储缓冲器24内的单个短期矢量22内。由系统1处理的各个不同类型的充气轮胎4要施加的密封剂的参考量被存储在控制单元16内。针对各个不同类型的充气轮胎4要施加的密封剂的参考量优选地在系统1的实验微调步骤期间根据各个不同类型的充气轮胎4的参考特性(特别是根据尺寸/大小)来确定。优选地,针对由系统1处理的各个不同类型的充气轮胎4要施加的密封剂的参考量是固定的,并且在系统1的操作期间不被修改。
28.一旦选择了要处理的充气轮胎4的类型,控制单元16被配置为将施加到各个充气轮胎4的密封剂的量与相应的参考量进行比较。特别地,控制单元16被配置为计算针对各个充气轮胎4施加的密封剂的量与相应的参考量之间的差。施加到各个充气轮胎4的密封剂的量与相应的参考量之间的差被存储在短期矢量22内。显然,以这种方式,包含在短期矢量22内的数据独立于充气轮胎4的参考特性(特别是根据尺寸/大小),并且可以存储与不同类型的充气轮胎4有关的数据。因此,控制单元16能够评估相对于要施加的密封剂的参考量的偏差的方向/取向(即,与要施加的密封剂的参考量相比,是否倾向于施加更多或更少量的密封剂)和相对于要施加的密封剂的参考量的偏差的绝对值(即,要施加的密封剂的量相对于要施加的密封剂的参考量偏离多少)。
29.短期矢量22包括在80和120之间、优选地在95和105之间、特别地等于100的多个单元。短期矢量22优选地使用fifo逻辑(先进先出)来处置。
30.类似地,与针对各个充气轮胎4施加的密封剂的量有关的数据(其根据施加密封剂之后各个充气轮胎4的重量与施加密封剂之前同一充气轮胎4的重量之间的差而计算)被存储在存储缓冲器23内的一维阵列25或长期矢量内。长期矢量25定义长期存储缓冲器26。
31.根据第一变型,多个长期矢量25被存储在长期存储缓冲器26内,其中各个长期矢量22对应于不同类型的充气轮胎4,由此可以施加由系统1处理的密封剂层。
32.根据第二优选变型,利用长存储缓冲器26内的单个长期矢量25来存储与可以施加由系统1处理的密封剂层的所有不同类型的充气轮胎4有关的数据。针对由系统1处理的各个不同类型的充气轮胎4要施加的密封剂的参考量存储在控制单元16内。针对各个不同类型的充气轮胎4要施加的密封剂的参考量优选地在系统1的实验微调步骤期间根据各个不同类型的充气轮胎4的参考特性(特别是根据尺寸/大小)来确定。优选地,针对由系统1处理
的各个不同类型的充气轮胎4要施加的密封剂的参考量是固定的,并且在系统1的操作期间不被修改。
33.一旦选择了要处理的充气轮胎4的类型,控制单元16被配置为将施加到各个充气轮胎4的密封剂的量与相应的参考量进行比较。特别地,控制单元16被配置为计算针对各个充气轮胎4施加的密封剂的量与相应的参考量之间的差。施加到各个充气轮胎4的密封剂的量与相应的参考量之间的差被存储在长期矢量25内。显然,以这种方式,包含在长期矢量25内的数据独立于充气轮胎4的参考特性(特别是根据尺寸/大小),并且可以存储与不同类型的充气轮胎4有关的数据。因此,控制单元16能够评估相对于要施加的密封剂的参考量的偏差的方向/取向(即,与要施加的密封剂的参考量相比,是否倾向于施加更多或更少量的密封剂)和相对于要施加的密封剂的参考量的偏差的绝对值(即,要施加的密封剂的量相对于要施加的密封剂的参考量偏离多少)。
34.长期矢量25包括在450和500之间、优选地在480和520之间、特别地等于500的多个单元。优选地使用fifo逻辑(先进先出)来处理长期矢量25。
35.最后,与针对各个充气轮胎4施加的密封剂的量有关的数据(根据施加密封剂之后各个充气轮胎的重量与施加密封剂之前同一充气轮胎的重量之间的差计算)被存储在存储缓冲器23内的一维阵列27或历史存储矢量内。历史存储矢量27定义历史存储缓冲器28。历史存储缓冲器28收集大约500000个充气轮胎的生产数据。对于各个充气轮胎4,除了与所施加的密封剂的量有关的数据之外,在历史存储缓冲器28内,还存储例如附加的生产数据,诸如充气轮胎4的生产发生的一年中的时间、用于生产充气轮胎4的喷嘴13的类型等。
36.如图3所示,预测算法29被存储在控制单元16内,控制单元16在输入处尤其接收由短期存储缓冲器24、长期存储缓冲器26和历史存储缓冲器28提供的数据。
37.特别地,预测算法29接收以下输入数据:
38.(a)存储在短期存储缓冲器24内的密封剂的量的平均值;
39.(b)存储在短期存储缓冲器24内的密封剂的量的方向/取向(即,与要施加的密封剂的参考量相比,是否倾向于施加更多或更少量的密封剂);
40.(c)存储在长期存储缓冲器26内的密封剂的量的平均值;
41.(d)存储在长期存储缓冲器26内的密封剂的量的方向/取向(即,与要施加的密封剂的参考量相比,如果倾向于施加更多或更少量的密封剂);
42.(e)由历史存储缓冲器28提供的生产数据;
43.(f)施加器装置7不工作的时间量(即,施加器装置7保持静止的时间量;已经通过实验验证了密封剂在供应回路9内的静止性质负面地影响密封剂的特性,特别是密度);
44.(g)与密封剂有关的历史数据(可能在被施加之前甚至1至3个月生产的密封剂被保持在桶中;显然,从生产到施加在充气轮胎4上所经过的时间量不利地影响该密封剂的特征,特别是密度)。
45.根据接收到的所有输入数据,预测算法29产生短期补偿因子k
st
和长期补偿因子k
lt
。
46.预测算法29包括数学模型,其中不同的先前处理的输入数据用于计算短期补偿因子k
st
和长期补偿因子k
lt
。
47.短期补偿因子k
st
和长期补偿因子k
lt
如下确定:
48.k
st,klt
=k1*(a) k2*(b)
…
k7*(g)
49.其中(a)至(g)表示输入不同的输入数据并且ki(其中i=1、2、
…
7)表示赋予各个输入数据的权重。
50.权重ki不是恒定的,而是取决于正在计算的补偿因子,从而区分短期补偿因子k
st
和k
lt
补偿因子。在计算短期补偿因子k
st
的情况下,赋予大于从短期存储缓冲器24中获取的数据(a)和(b)的权重;而相反,在计算长期补偿因子k
lt
的情况下,赋予大于从长期存储缓冲器26获取的数据(c)和(d)的权重。
51.最后,控制单元16包括模块30,该模块30用于计算其在输入处从预测算法29接收的补偿参数、短期补偿因子k
st
和长期补偿因子k
lt
这两者、以及例如进一步的生产数据(通常用rep(recipe extrusion parameter(配方挤出参数))指示)(诸如正处理的充气轮胎4的尺寸、喷嘴13的类型、挤出速度等)。
52.基于由预测算法29提供的短期补偿因子k
st
或长期补偿因子k
lt
以及基于rep生产数据,计算模块30产生挤出处理校正因子k
ea
。
53.计算模块30包括用于计算校正因子k
ea
的数学模型。特别地,校正因子k
ea
被确定如下:
54.k
ea
=p1*k
st
/k
lt
p2*rep
55.其中k
st
/k
lt
和rep具有先前引入的含义,并且pi(其中i=1、2)表示分别赋予短期补偿因子k
st
或长期补偿因子k
lt
和rep生产数据的权重。权重pi优选地是恒定的。
56.来自预测算法29的短期补偿因子k
st
和长期补偿因子k
lt
不是同时使用的,而是仅在公式内排他地使用以确定校正因子k
ea
。
57.在正常生产处理期间,在公式内使用短期补偿因子k
st
来确定校正因子k
ea
。相反,在系统1例如在生产关闭时段之后重新启动的情况下,在公式内使用长期补偿因子k
lt
来确定校正因子k
ea
。
58.在下文中,将描述系统1的操作方法,其依次包括以下步骤:
[0059]-操作者或可替代地自动操纵器将充气轮胎4布置在支撑件5上并通过侧向轨道以防止充气轮胎4自身的任何侧向平移的方式阻挡充气轮胎4;
[0060]-在称重站18处,在施加密封剂之前测量充气轮胎4的重量;
[0061]-将施加器装置7插入内腔3中;
[0062]-喷嘴13布置在初始位置,以开始施加密封剂;
[0063]-通过框架使充气轮胎4围绕x轴旋转,同时喷嘴13开始施加密封剂;
[0064]-在充气轮胎4围绕轴x旋转期间,喷嘴13以保持喷嘴13和表面5之间的距离基本恒定的方式移动,以实现对表面2的更均匀的施加;
[0065]-在将密封剂施加到表面2的步骤结束时,在称重站20处,在施加密封剂结束时测量充气轮胎4的重量;
[0066]-框架5停止,使得施加器装置7可以从内腔3中抽出,并且充气轮胎4可以从框架5中抽出;
[0067]-以及在称重站18、20处记录的数据被发送到控制单元16,以根据前述讨论中描述的方法确定校正因子k
ea
。
[0068]
在前面的讨论中描述的系统1的优点是明显的。
[0069]
特别地,校正因子k
ea
的确定使得可以将密封剂非常均匀且恒定地施加到表面2上,只要使得可以考虑由挤出处理和由供应回路9内的密封剂流的振荡产生的变化即可。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。