1.本发明涉及一种定量包装设备,尤其涉及一种大米加工定量包装设备。
背景技术:
2.大米生产出来后,为了方便后续对大米的处理与运输,一般都需要对大米进行装袋包装。
3.公布号为cn210503440u的中国专利公布了一种大米包装装置,包括底座和第一碾米盘,所述底座上方设置有滑道,所述滑道左侧设置有包装绳支撑杆,所述包装绳支撑杆中间位置设置有刀具,所述大米出口两侧连接有固定针,所述进渣口连接有出渣通道,所述鼓风口右侧连接有鼓风机,所述支撑架右上方设置有电机,且电机上设置有传动带,并且传动带连接有转轴,所述第一碾米盘连接有转轴,所述大米通道上开设有孔洞,且孔洞中设置有转轴,所述第一碾米盘里侧设置有第二碾米盘,所述第一碾米盘上方设置有进米口,所述第二碾米盘上方设置有挡板。该大米包装装置,设置有滑道,包装好的大米可以通过呈倾斜设置的滑道直接滑出包装大米区域,提高了大米包装效率,上述专利虽然能够对大米进行包装,但不能把控包装大米的量一致,难以实现定量包装。
4.本发明旨在解决上述专利中存在的问题,为此,提出一种能够对大米进行定量包装的大米加工定量包装设备。
技术实现要素:
5.为了克服上述专利虽然能够对大米进行包装,但不能把控包装大米的量一致,难以实现定量包装的缺点,本发明提供一种能够对大米进行定量包装的大米加工定量包装设备。
6.本发明通过以下技术途径实现:
7.一种大米加工定量包装设备,包括有支撑架、下料斗、接料舱、弹性卡爪、出料管、下料机构和驱动机构,支撑架上部内侧沿周向固接有接料舱,接料舱左右两侧下部中间连通有用于将大米排入袋子内的出料管,出料管外侧下部沿周向均匀间隔的转动连接有用于将袋子撑开的弹性卡爪,接料舱顶部沿周向固接有用于大米放置的下料斗,下料斗上设置有用于带动大米向下移动进行输送的下料机构,下料机构与接料舱之间设置有用于提供驱动力的驱动机构。
8.进一步的说明,下料机构包括有运料管、转杆、螺旋板和分料盘,下料斗底部左右对称连通有运料管,左右两侧运料管都位于接料舱内,下料斗下部沿周向固接有分料盘,分料盘上左右对称转动式的穿接有转杆,左右两侧转杆上都固定套装有用于带动大米向下移动的螺旋板,左右两侧螺旋板分别位于左右两侧运料管内。
9.进一步的说明,驱动机构包括有伺服电机、长轴、转动环、第一弹簧、花键轴和筒体,下料斗底部中间与分料盘中部之间转动式的穿接有长轴,长轴下部与左右两侧转杆上部之间通过皮带传动,接料舱内前后两侧下部之间固接有伺服电机,伺服电机的输出轴端
部通过联轴器连接有筒体,筒体内滑动式的连接有用于带动长轴转动的花键轴,花键轴顶端嵌入长轴底端,花键轴上部沿周向转动式的套装有转动环,转动环底部连接有第一弹簧,第一弹簧尾端通过转动片与筒体顶部转动连接,第一弹簧套在花键轴上。
10.进一步的说明,还包括有用于使长轴停止转动的动力切断机构,动力切断机构包括有接触架、挡板、接触板、磁吸架和第二弹簧,接料舱内底部前后两之间固接有磁吸架,磁吸架前后两侧之间滑动式的穿接有用于对大米进行接收的挡板,挡板位于接料舱内,挡板内顶部前后两侧分别与磁吸架顶部前后两侧之间连接有第二弹簧,接料舱上部前后对称滑动式的穿接有接触架,前后两侧接触架底端都与挡板外顶部固定连接,转动环前后两侧中部都固接有接触板,前后两侧接触板分别位于前后两侧接触架下方,接触架向下移动与接触板接触。
11.进一步的说明,还包括有限位块,挡板底部两端都固接有限位块。
12.进一步的说明,还包括有用于使弹性卡爪摆动一定距离的辅助卸料机构,辅助卸料机构包括有横板、竖杆、安装板、下压环和第三弹簧,支撑架外左右两侧面上部中间都固接有安装板,左右两侧安装板上都前后对称滑动式的穿接有竖杆,左侧两根竖杆底端之间与右侧两根竖杆底端之间都固接有用于带动弹性卡爪向下摆动的下压环,下压环位于弹性卡爪上方,左侧两根竖杆顶端之间与右侧两根竖杆顶端之间都固接有横板,左右两侧横板都位于前后两侧接触架下方,接触架向下移动与横板接触,左右两侧下压环顶部前后两侧分别与左右两侧安装板底部之间前后对称连接有第三弹簧,四根第三弹簧分别套在四根竖杆上。
13.进一步的说明,还包括有用于对大米进行搅动的防堵机构,防堵机构包括有安装环和叶片,长轴上部固接有安装环,安装环外侧沿周向均匀间隔的固接有用于对大米进行搅动的叶片,叶片位于下料斗内。
14.进一步的说明,还包括有用于对装有大米袋子进行缓冲的缓冲机构,缓冲机构包括有缓冲板、导柱和第四弹簧,支撑架内底部左右两侧都前后对称滑动式的穿接有导柱,四根导柱顶端之间固接有用于对装有大米的袋子进行缓冲的缓冲板,缓冲板外底部与支撑架内底部之间连接有四根第四弹簧,四根第四弹簧分别套在四根导柱上。
15.本发明其显著进步在于:
16.1、将两个袋子通过弹性卡爪撑开,再将适量的大米倒入下料斗内,启动驱动机构带动下料机构运作,下料机构运作带动大米向下移动掉落至接料舱内,接料舱内的大米通过左右两侧出料管排入左右两侧袋子内,两个袋子内都装有定量的大米时,关闭驱动机构,下料机构停止运作,如此,可对大米进行定量包装。
17.2、在动力切断机构的作用下,每当定量的大米掉落至接料舱内时,动力切断机构可使得螺旋板停止转动,定量的大米排入左右两侧袋子内,如此,可使得定量的大米分别排入左右两侧袋子内,且无需不断的关闭和启动伺服电机,比较方便。
18.3、在辅助卸料机构的作用下,每当袋子内装有定量的大米时,装有大米的袋子也就从弹性卡爪上掉落下,如此,无需操作人员用手将装有适量大米的两个袋子取下,方便快捷。
附图说明
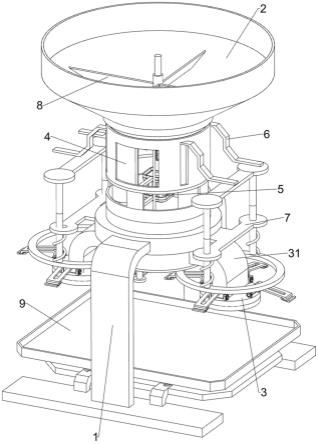
19.图1为本发明的立体结构示意图。
20.图2为本发明下料机构的部分剖视结构示意图。
21.图3为本发明驱动机构的部分剖视结构示意图。
22.图4为本发明a部分的放大示意图。
23.图5为本发明动力切断机构的部分剖视结构示意图。
24.图6为本发明b部分的放大示意图。
25.图7为本发明辅助卸料机构的部分立体结构示意图。
26.图8为本发明防堵机构的部分立体结构示意图。
27.图9为本发明缓冲机构的部分剖视结构示意图。
28.图10为本发明c部分的放大示意图。
29.图中标号名称:1-支撑架,2-下料斗,21-接料舱,3-弹性卡爪,31-出料管,4-下料机构,41-运料管,42-转杆,43-螺旋板,44-分料盘,5-驱动机构,51-伺服电机,52-长轴,53-转动环,54-第一弹簧,55-花键轴,56-筒体,6-动力切断机构,61-接触架,62-挡板,63-接触板,64-磁吸架,65-第二弹簧,66-限位块,7-辅助卸料机构,71-横板,72-竖杆,73-安装板,74-下压环,75-第三弹簧,8-防堵机构,81-安装环,82-叶片,9-缓冲机构,91-缓冲板,92-导柱,93-第四弹簧。
具体实施方式
30.下面结合具体实施例对技术方案做进一步的说明,需要注意的是:本文中所说的上、下、左、右等指示方位的字词仅是针对所示结构在对应附图中位置而言。本文中为零部件所编序号本身,例如:第一、第二等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说如:连接、联接,如无特别说明,均包括直接和间接连接(联接)。
31.实施例1
32.一种大米加工定量包装设备,包括有支撑架1、下料斗2、接料舱21、弹性卡爪3、出料管31、下料机构4和驱动机构5,请参阅图1-图4所示,支撑架1上部内侧沿周向通过焊接连接的方式安装有接料舱21,接料舱21左右两侧下部中间连通有出料管31,当大米排入出料管31内时,出料管31可实现将大米排入袋子内,出料管31外侧下部沿周向均匀间隔的转动连接有弹性卡爪3,操作人员可将袋子套在弹性卡爪3上进行装大米,接料舱21顶部沿周向固接有下料斗2,操作人员可将适量的大米倒入下料斗2内,下料斗2上设置有下料机构4,当下料机构4运作时,下料机构4可实现带动大米向下移动进行输送,下料机构4与接料舱21之间设置有驱动机构5,驱动机构5用于提供驱动力。
33.下料机构4包括有运料管41、转杆42、螺旋板43和分料盘44,请参阅图1和图2所示,下料斗2底部左右对称连通有运料管41,左右两侧运料管41都位于接料舱21内,下料斗2下部沿周向通过焊接连接的方式安装有分料盘44,分料盘44上左右对称转动式的穿接有转杆42,左右两侧转杆42上都固定套装有螺旋板43,左右两侧螺旋板43分别位于左右两侧运料管41内,当螺旋板43转动时,螺旋板43可实现带动大米向下移动。
34.驱动机构5包括有伺服电机51、长轴52、转动环53、第一弹簧54、花键轴55和筒体56,请参阅图1、图3和图4所示,下料斗2底部中间与分料盘44中部之间转动式的穿接有长轴
52,长轴52下部与左右两侧转杆42上部之间通过皮带传动,接料舱21内前后两侧下部之间固接有伺服电机51,伺服电机51的输出轴端部通过联轴器连接有筒体56,筒体56内滑动式的连接有花键轴55,花键轴55顶端嵌入长轴52底端,当花键轴55转动时,花键轴55可实现带动长轴52转动,花键轴55上部沿周向转动式的套装有转动环53,转动环53底部连接有第一弹簧54,第一弹簧54尾端通过转动片与筒体56顶部转动连接,第一弹簧54套在花键轴55上。
35.首先操作人员拉动左右两侧的四个弹性卡爪3向下摆动一定距离,再将两个袋子分别套在左右两侧的四个弹性卡爪3之间,松开左右两侧的四个弹性卡爪3,左右两侧的四个弹性卡爪3向上摆动复位分别将左右两侧袋子撑开,再将适量的大米倒入下料斗2内,下料机构4将大米挡住,即可启动驱动机构5,驱动机构5运作带动下料机构4运作,下料机构4运作带动下料斗2内的大米向下移动进行输送,大米被输送至接料舱21内,接料舱21内的大米排入左右两侧出料管31内,左右两侧出料管31内的大米分别掉落至左右两侧袋子内,左右两侧袋子内都装有适量的大米时,关闭驱动机构5,驱动机构5停止带动下料机构4运作,下料机构4停止带动大米向下移动,左右两侧出料管31内也就没有大米排入袋子内,即可将装有适量大米的两个袋子从弹性卡爪3上取下进行封袋,也就完成了对大米的包装,如此反复,可不断的对大米进行定量包装。
36.当操作人员将适量的大米倒入下料斗2内时,大米掉落至左右两侧运料管41内,大米与左右两侧螺旋板43接触,即可启动驱动机构5,驱动机构5运作带动左右两侧转杆42转动,左右两侧转杆42转动带动左右两侧螺旋板43转动,左右两侧螺旋板43转动带动大米向下移动进行输送,大米向下移动与螺旋板43脱离接触时,大米掉落至接料舱21内,接料舱21内的大米也就排入左右两侧出料管31内,左右两侧出料管31内的大米也就分别排入左右两侧袋子内进行包装,当左右两侧袋子内都装有适量的大米时,关闭驱动机构5,驱动机构5停止带动左右两侧转杆42转动,左右两侧转杆42停止带动左右两侧螺旋板43转动,大米停止掉落至接料舱21内,左右两侧出料管31也就没有大米排出,即可将装有适量大米的袋子从弹性卡爪3上取下。
37.当适量的大米倒入下料斗2内时,启动伺服电机51,伺服电机51转动带动筒体56转动,筒体56转动带动花键轴55转动,花键轴55转动带动长轴52转动,长轴52转动通过皮带传动带动左右两侧转杆42转动,也就使得大米输送至接料舱21内,大米通过左右两侧出料管31排入左右两侧袋子内,左右两侧袋子内都装有适量的大米时,关闭伺服电机51,伺服电机51停止带动筒体56转动,筒体56停止带动花键轴55转动,花键轴55停止带动长轴52转动,长轴52停止通过皮带带动左右两侧转杆42转动,左右两侧螺旋板43也就停止转动。
38.实施例2
39.在实施例1的基础上,还包括有动力切断机构6,动力切断机构6包括有接触架61、挡板62、接触板63、磁吸架64和第二弹簧65,请参阅图1、图5和图6所示,接料舱21内底部前后两之间固接有磁吸架64,磁吸架64前后两侧之间滑动式的穿接有挡板62,挡板62位于接料舱21内,当大米掉落至接料舱21内时,挡板62可实现对大米进行接收,挡板62内顶部前后两侧分别与磁吸架64顶部前后两侧之间连接有第二弹簧65,接料舱21上部前后对称滑动式的穿接有接触架61,前后两侧接触架61底端都与挡板62外顶部通过焊接连接的方式安装,转动环53前后两侧中部都固接有接触板63,前后两侧接触板63分别位于前后两侧接触架61下方,接触架61向下移动与接触板63接触。
40.还包括有限位块66,请参阅图5所示,挡板62底部两端都固接有限位块66。
41.还包括有辅助卸料机构7,辅助卸料机构7包括有横板71、竖杆72、安装板73、下压环74和第三弹簧75,请参阅图1和图7所示,支撑架1外左右两侧面上部中间都通过焊接连接的方式安装有安装板73,左右两侧安装板73上都前后对称滑动式的穿接有竖杆72,左侧两根竖杆72底端之间与右侧两根竖杆72底端之间都固接有下压环74,下压环74位于弹性卡爪3上方,当下压环74向下移动时,下压环74可实现带动弹性卡爪3向下摆动,左侧两根竖杆72顶端之间与右侧两根竖杆72顶端之间都通过焊接连接的方式安装有横板71,左右两侧横板71都位于前后两侧接触架61下方,接触架61向下移动与横板71接触,左右两侧下压环74顶部前后两侧分别与左右两侧安装板73底部之间前后对称连接有第三弹簧75,四根第三弹簧75分别套在四根竖杆72上。
42.当伺服电机51启动时,左右两侧的螺旋板43使得大米掉落至接料舱21内,大米与挡板62接触,随着大米不断的掉落至接料舱21内,大米带动挡板62向下移动,前后两侧第二弹簧65被压缩,挡板62向下移动带动前后两侧接触架61向下移动,前后两侧接触架61向下移动与前后两侧接触板63接触时,前后两侧接触架61带动前后两侧接触板63向下移动,前后两侧接触板63向下移动带动转动环53向下移动,第一弹簧54被压缩,转动环53向下移动带动花键轴55向下移动,花键轴55向下移动与长轴52脱离接触,花键轴55也就停止带动长轴52转动,左右两侧螺旋板43停止转动,大米停止掉落至接料舱21内,此时,挡板62也就向下移动至最大行程了,挡板62与磁吸架64接触,磁吸架64通过磁力将挡板62吸住固定,挡板62停止继续向下移动,接料舱21内的大米排入左右两侧出料管31内,左右两侧出料管31内的大米排入左右两侧袋子内,当接料舱21内的大米全部排出后,将装有适量大米的两个袋子从弹性卡爪3上取下,再将新的两个袋子套在左右两侧的四个弹性卡爪3上,拉动前后两侧接触架61向上移动一定距离,前后两侧接触架61向上移动带动挡板62向上移动,挡板62向上移动与磁吸架64脱离接触,松开前后两侧接触架61,因前后两侧第二弹簧65的作用,挡板62向上移动复位带动前后两侧接触架61向上移动复位,由于限位块66的作用,能避免挡板62向上移动出现脱离现象,前后两侧接触架61向上移动复位与前后两侧接触板63脱离接触,因第一弹簧54的作用,转动环53向上移动复位带动前后两侧接触板63向上移动复位,转动环53还带动花键轴55向上移动复位,花键轴55向上移动复位继续插入长轴52内,花键轴55带动长轴52转动,也就使得左右两侧螺旋板43转动带动大米向下移动掉落至接料舱21内,如此反复,可不断的使得定量的大米进行装袋包装。如此,可使得定量的大米分别排入左右两侧袋子内,且无需不断的关闭和启动伺服电机51,比较方便。
43.当大米带动挡板62向下移动时,前后两侧接触架61向下移动与左右两侧横板71接触,前后两侧接触架61也就带动左右两侧横板71向下移动,左右两侧横板71向下移动带动四根竖杆72向下移动,四根竖杆72向下移动带动左右两侧下压环74向下移动,四根第三弹簧75被压缩,左右两侧下压环74向下移动分别与左右两侧的四个弹性卡爪3向下摆动,进而挡板62停止向下移动时,接料舱21内的大米分别通过左右两侧出料管31排入左右两侧袋子内,当左右两侧袋子内装有适量的大米时,由于弹性卡爪3向下摆动了一定距离,装有适量大米的两个袋子从弹性卡爪3上掉落下,再拉动前后两侧接触架61向上移动一定距离,前后两侧接触架61向上移动带动挡板62向上移动距离与磁吸架64脱离接触,挡板62也就向上移动复位带动前后两侧接触架61向上移动复位,前后两侧接触架61向上移动复位与左右两侧
横板71脱离接触,因四根第三弹簧75的作用,左右两侧下压环74向上移动复位通过四根竖杆72带动左右两侧横板71向上移动复位,左右两侧下压环74向上移动复位与弹性卡爪3脱离接触,弹性卡爪3也就向上摆动复位。如此,无需操作人员用手将装有适量大米的两个袋子取下,方便快捷。
44.实施例3
45.在实施例1和实施例2的基础上,还包括有防堵机构8,防堵机构8包括有安装环81和叶片82,请参阅图1和图8所示,长轴52上部通过焊接连接的方式安装有安装环81,安装环81外侧沿周向均匀间隔的固接有叶片82,叶片82位于下料斗2内,当叶片82转动时,叶片82可实现对大米进行搅动。
46.还包括有缓冲机构9,缓冲机构9包括有缓冲板91、导柱92和第四弹簧93,请参阅图1、图9和图10所示,支撑架1内底部左右两侧都前后对称滑动式的穿接有导柱92,四根导柱92顶端之间通过焊接连接的方式安装有缓冲板91,当装好大米的袋子向下掉落时,缓冲板91可实现对装有大米的袋子进行缓冲,缓冲板91外底部与支撑架1内底部之间连接有四根第四弹簧93,四根第四弹簧93分别套在四根导柱92上。
47.当伺服电机51启动时,长轴52转动还带动安装环81转动,安装环81转动带动四块叶片82转动,四块叶片82转动对下料斗2内的大米进行搅动,搅动中的大米被左右两侧螺旋板43进行输送,当长轴52停止转动时,长轴52停止带动安装环81转动,安装环81停止带动四块叶片82转动,四块叶片82也就停止对大米进行搅动。如此,可避免大米出现堵塞现象影响输送。
48.当装有适量大米的两个袋子向下掉落时,装有适量大米的两个袋子与缓冲板91接触,因四根第四弹簧93的作用,缓冲板91能对装有适量大米的两个袋子进行缓冲,操作人员再将两袋大米从缓冲板91上取下。如此,能更好的对掉落的两袋大米进行接收。
49.最后,有必要说明的是:上述内容仅用于帮助理解本发明的技术方案,不能理解为对本发明保护范围的限制;本领域技术人员根据本发明的上述内容所做出的非本质改进和调整,均属本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。