1.本发明主要涉及机械抛光加工技术领域,具体涉及一种柔性抛光系统及控制方法。
背景技术:
2.在机械自动化加工过程中,由于机器人的定位误差、抛光装置的制造误差、工件制造精度等,在抛光过程中容易出现抛光不均匀的情况,影响抛光加工的质量,误差过大时会导致工件和设备损坏,抛光加工的安全性有待提高。
3.柔性抛光技术是实现高度兼容性的高精度抛光的关键技术,主要有主动柔性抛光和被动柔性抛光,被动柔性抛光是通过在抛光装置设置辅助抛光机构,能够自动适应抛光作用力,但是被动柔性抛光局限性较大,只能适用简单的工件表面抛光要求。
4.主动柔性抛光主要通过机器人的位置和力矩的反馈,进行工业机器人位姿的调整,从而达到调整抛光作用力的效果,或者通过机器人视觉反馈技术,根据工件表面轮廓设定机器人的运行轨迹,达到柔性抛光的效果,但是对于复杂表面形貌的工件,在抛光过程中容易出现磨损的情况。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,本发明提供了一种柔性抛光系统及控制方法,所述柔性抛光系统包括工业机器人、柔性抛光装置和反馈调节装置,通过设置三向应变花配合反馈调节装置进行抛光主动反馈控制,通过被动柔性抛光机构进行抛光形状被动自适应,主动柔性抛光和被动柔性抛光的结合保证了抛光加工的质量和安全性。
6.本发明提供了一种柔性抛光系统,所述柔性抛光系统包括柔性抛光装置、工业机器人和反馈调节装置,所述抛光装置固定在所述工业机器人的工作端上;
7.所述柔性抛光装置包括抛光头机构、法兰盘固定座和若干个弹性调节机构,所述抛光头机构基于球铰连接在所述法兰盘固定座上,所述若干个弹性调节机构均匀布置在所述抛光头机构和所述法兰盘固定座之间;
8.所述柔性抛光装置上设置有三向应变花,所述三向应变花基于连接电线接入所述反馈调节装置;
9.所述工业机器人包括cpu组件,所述反馈调节装置与所述cpu组件连接。
10.进一步的,所述柔性抛光装置包括抛光头机构、法兰盘固定座和若干个弹性调节机构,所述抛光头机构基于球铰连接在所述法兰盘固定座上,所述若干个弹性调节机构均匀布置在所述抛光头机构和所述法兰盘固定座之间。
11.进一步的,所述弹性调节杆包括弹簧导杆和压缩弹簧,所述压缩弹簧套接在所述弹簧导杆上。
12.进一步的,所述柔性抛光装置还包括法兰盘,所述法兰盘的一端固定在所述法兰盘固定座上,所述法兰盘的另一端基于螺栓连接固定在所述工业机器人的工作端上。
13.进一步的,所述三向应变花粘贴固定在所述法兰盘的圆周侧壁上。
14.本发明还提供了一种柔性抛光控制方法,所述柔性抛光控制方法适用于所述柔性抛光系统,所述控制方法包括:
15.所述三向应变花根据所述柔性抛光装置的弹性形变生成自身的阻值变化通量,并将所述阻值变化通量传输到所述反馈调节装置上;
16.所述阻值变化通量经过所述测量电桥,转换为电信号;
17.所述电信号经过信号处理后,得到数字信号;
18.所述数字信号传输到所述控制器,所述控制器根据所述数字信号运算生成控制信号;
19.所述反馈调节装置将所述控制信号发送到所述工业机器人的cpu组件上,所述cpu组件根据所述控制信号调整所述工业机器人的动作。
20.进一步的,所述阻值变化通量经过所述测量电桥,转换为电信号,包括:
21.所述测量电桥为惠斯通电桥,所述三向应变花接入所述惠斯通电桥;
22.所述三向应变花基于所述柔性抛光装置弹性形变的阻值变化通量,通过所述惠斯通电桥转变为电信号。
23.进一步的,所述电信号经过信号处理后,得到数字信号,包括:
24.所述反馈调节装置设置有信号放大器、信号调理器和模数转换器;
25.通过所述信号放大器对所述电信号进行放大增强,得到放大后的电信号;
26.将所述放大后的电信号输入所述信号调理器中,经过信号调理后得到标准的电信号;
27.将所述标准的电信号输入所述模数转换器,通过模数转换后得到数字信号。
28.进一步的,将所述放大后的电信号输入所述信号调理器中,经过信号调理后得到标准的电信号,包括:
29.将所述放大后的电信号依次经过降噪、滤波、整形处理后,得到标准电信号。
30.进一步的,所述控制器的控制策略分为阻抗控制、力位混合控制和自适应控制。
31.本发明提供了一种柔性抛光系统及控制方法,所述柔性抛光系统设置有工业机器人、柔性抛光装置和反馈调节装置,通过设置柔性抛光装置达到自适应的被动柔性调整,满足不同工件表面形貌的抛光要求,通过在所述柔性抛光装置上设置三向应变花,收集所述柔性抛光装置的弹性形变,并以阻值变化通量的形式发送到所述反馈调节装置上进行分析处理,经过测量电桥、信号放大处理、信号调理、模数转换和控制器的处理,生成所述工业机器人各个关节部位对应的控制信号,并根据该控制信号对所述工业机器人进行柔性控制,所述柔性抛光系统及控制方法结合被动柔性调整和主动柔性调整,提高对工件表面抛光的均一性和安全性,保证加工质量。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
33.图1是本发明实施例中柔性抛光系统结构示意图;
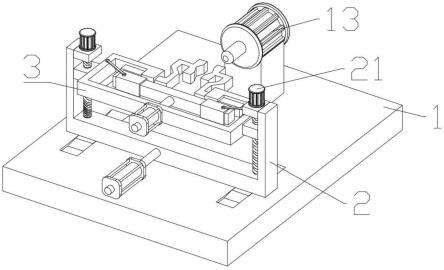
34.图2是本发明实施例中柔性抛光装置结构示意图;
35.图3是本发明实施例中抛光头结构示意图;
36.图4是本发明实施例中抛光头固定座结构示意图;
37.图5是本发明实施例中法兰盘固定座结构示意图;
38.图6是本发明实施例中第一弹性调节机构结构示意图;
39.图7是本发明实施例中弹簧导杆结构示意图;
40.图8是本发明实施例中法兰盘结构示意图;
41.图9是本发明实施例中反馈调节装置结构示意图;
42.图10是本发明实施例中柔性抛光系统的控制方法流程图;
43.图11是本发明实施例中信号处理方式流程图;
44.图12是本发明实施例中信号调理器结构示意图。
具体实施方式
45.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
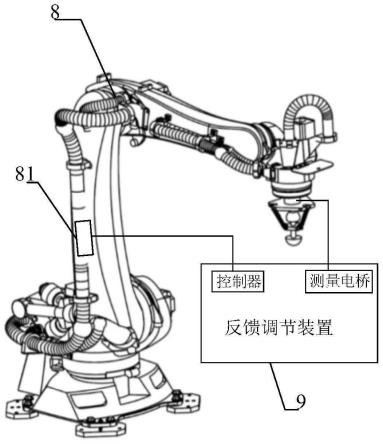
46.图1示出了本发明实施例中柔性抛光系统结构示意图,图2示出了本发明实施例中柔性抛光装置结构示意图,所述柔性抛光系统包括反馈调节装置9、工业机器人8和柔性抛光装置,所述柔性抛光装置固定在所述工业器件人8的工作端上。
47.进一步的,所述工业机器人可以为六轴机器人,能够实现复杂的抛光加工动作,满足表面形貌复杂的工件抛光需求。根据实际加工需求,所述工业机器人也可以为四轴机器人。
48.具体的,所述工业机器人8上设置有cpu组件81,所述cpu组件81用以控制所述工业机器人8各个关节的动作。所述反馈调节装置9与所述cpu组件81连接,所述反馈调节装置9和所述cpu组件81之间进行数据传输。
49.具体的,所述柔性抛光装置包括抛光头1、抛光头固定座2、法兰盘固定座3和若干个弹性调节机构;所述抛光头1固定在所述抛光头固定座2上,所述抛光头固定座2和所述法兰盘固定座3基于球形铰链配合连接,能够进行多方位的抛光加工。
50.所述若干个弹性调节机构包括第一弹性调节机构5、第二弹性调节机构6和第三弹性调节机构7,所述第一弹性调节机构5、第二弹性调节机构6和第三弹性调节机构7均匀布置在所述抛光头固定座2和所述法兰盘固定座3之间。
51.具体的,图3示出了本发明实施例中抛光头结构示意图,所述抛光头1为半球体结构,在对工件表面进行抛光加工时,保持对工件表面的切点接触,避免在工件表面造成划痕,影响加工质量。
52.具体的,所述抛光头1自圆形端面的中心位置向外延伸有第一连接杆11,所述第一连接杆11设置有外螺纹。所述抛光头1通过带有外螺纹结构的第一连接杆11连接所述抛光设备,便于进行抛光头1的更换。
53.具体的,图4示出了本发明实施例中抛光头固定座结构示意图,所述抛光头固定座2为板状结构,所述抛光头固定座2一端端面的中部位置上设置有螺纹连接孔21,所述抛光头1的第一连接杆11与所述螺纹连接孔21配合连接。所述抛光头1基于所述第一连接杆11螺接固定在所述抛光头固定座2上。
54.进一步的,所述抛光头固定座2的另一端端面上固定有第二连接杆26,所述第二连接杆26的一端固定在所述抛光头固定座2上,所述第二连接杆26的另一端上设置有球型连接头261,所述抛光头固定座2基于所述球型连接头261与所述法兰盘4固定盘配合连接。
55.具体的,图5示出了本发明实施例中法兰盘固定座结构示意图,所述法兰盘固定座3为板状结构,所述法兰盘固定座3的形状与所述抛光头固定座2的形状相同,所述法兰盘固定座3的尺寸大于所述抛光头固定座2的尺寸。所述法兰盘固定座3的一端端面的中部位置向外延伸形成第三连接杆31,所述第三连接杆31的一端上设置有配合部311,所述配合部311中部位置上向内凹陷有球型槽3111,所述第二连接杆26上的球型连接头261与所述球型槽3111铰接配合,所述抛光头1基于所述第二连接杆26和所述第三连接杆31的球铰连接,可以适应不同形状的加工表面,在加工曲面工件时,可以避免造成工件的划损。
56.具体的,所述抛光头固定座2上设置有若干个安装槽,所述若干个安装槽包括第一安装槽22、第二安装槽23和第三安装槽24,所述第一安装槽22、所述第二安装槽23和所述第三安装槽24均匀布置在所述抛光头固定座2上。
57.具体的,所述抛光头固定座2的一侧壁向内凹陷形成所述第一安装槽22,所述第一安装槽22内设置有短轴销25。所述法兰盘固定座3上设置有若干个配合槽,所述若干个配合槽包括第一配合槽32、第二配合槽33和第三配合槽34,所述第一配合槽32内设置有长轴销35。
58.具体的,图6示出了本发明实施例中第一弹性调节机构结构示意图,图7示出了本发明实施例中弹簧导杆结构示意图,所述弹簧导杆52为伸缩杆结构,包括套筒杆521和活动杆522,所述套筒杆521内部中空形成轴套结构,所述活动杆522的一部分伸进所述套筒杆521内部,所述活动杆522和所述套筒杆521之间为间隙配合,便于所述活动杆522在所述套筒杆521上来回移动,所述弹簧导杆52的整体长度可以基于所述伸缩杆机构改变,适应不同的加工表面形貌。
59.进一步的,所述套筒杆521的长度根据所述柔性抛光装置定制,所述柔性抛光装置达到最大变形时,所述弹簧导杆52伸展到最大长度,所述活动杆522保持一部分配合在所述套筒杆521内部,避免所述套筒杆521和所述活动杆522脱离配合,导致装置损坏,影响抛光加工。
60.具体的,所述弹簧导杆52的一端设置有第一连接部53,另一端设置有第二连接部54,所述第一连接部53上设置有第一连接孔531,所述第二连接部54上设置有第二连接孔541,所述第一连接孔531与所述短轴销25配合连接,所述第二连接孔541与所述长轴销35配合连接。所述第一弹性调节机构5的一端固定在所述第一安装槽22上,所述第一弹性调节机构5的另一端固定在所述第一配合槽32上。
61.进一步的,所述第一连接部53上设置有第一弹簧固定板532,所述第二连接部54上设置有第二弹簧固定板542,所述压缩弹簧51的一端固定在所述第一弹簧固定板532上,所述压缩弹簧51的另一端固定在所述第二弹簧固定板542上。
62.进一步的,所述第二弹性调节机构6和所述第三弹性调节机构7具有与所述第一弹性调节机构5相同的结构特点和功能作用,这里不再一一赘述。
63.具体的,所述抛光头固定座2和所述法兰盘固定座3基于所述第一弹性调节机构5、所述第二弹性调节机构6和所述第三弹性调节机构7保持相互平行。当所述抛光头1进行抛光加工时,所述抛光头固定座2随所述抛光头1与工件表面的接触,受到工件的反作用力发生偏转,所述弹簧导杆52基于所述抛光头固定座2的偏移伸展或者收缩,所述压缩弹簧51随之伸长或者压缩,即所述弹簧导杆52受到的作用力增长时,所述弹簧导杆52收缩,所述压缩弹簧51随之压缩,当所述弹簧导杆52受到作用力减少时,所述压缩弹簧51开始复位,带动所述弹簧导杆52伸展。当所述抛光头1脱离工件时,缺少外力的作用后,所述柔性抛光装置在所述压缩弹簧51的作用下复位。
64.具体的,图8示出了本发明实施例中法兰盘结构示意图,所述法兰盘固定座3的另一端端面中部位置上固定有法兰盘4,所述法兰盘4通过螺栓固定在所述工件机器人8上。
65.具体的,所述法兰盘4的圆周侧壁上设置有三向应变花41,所述三向应变花41由三个不同轴向的敏感栅电阻应变计组成,形成三轴45
°
的应变花结构。
66.进一步的,所述三向应变花41可以设置为三轴60
°
的应变花结构。所述三向应变花41可以基于所述柔性抛光装置的弹性形变,发生阻值变化,从而等比例反映出抛光力的大小。
67.进一步的,所述三向应变花41牢固地粘贴在所述法兰盘4的圆周侧壁上,与所述法兰盘紧密贴合,从而保证所述三向应变花41能够准确记录所述柔性抛光装置的弹性形变。
68.具体的,图9示出了本发明实施例中反馈调节装置结构示意图,所述三向应变花41通过连接线与所述反馈调节装置9连接,所述三向应变花41基于所述连接线将阻值变化量发送到所述反馈调节装置9上。所述反馈调节装置9内设置有测量电桥91、信号放大器92、信号调理器93、模数转换器94和控制器95。所述阻值变化量依次经过所述测量电桥91、信号放大器92、信号调理器93、模数转换器94和控制器95,经过所述反馈调节装置9处理后形成控制信号,反馈到所述工业机器人8的cpu组件81上。
69.实施例二:
70.图10示出了本发明实施例中柔性抛光系统的控制方法流程图;所述柔性抛光系统的控制方法包括:
71.s11:所述三向应变花41根据所述柔性抛光装置的弹性形变生成自身的阻值变化通量,并将所述阻值变化通量传输到所述反馈调节装置上。
72.s12:所述阻值变化通量经过所述测量电桥,转换为电信号。
73.具体的,所述测量电桥为惠斯通电桥,所述阻值变化量经过所述惠斯通电桥后转变为微弱的电信号,所述惠斯通电桥通过设置四个电阻作为电桥的四个臂,根据电阻的变化,所述惠斯通电桥电路的电流发生改变。
74.具体的,所述三向应变花41接入所述惠斯通电桥电路上,所述柔性抛光装置发生弹性形变时,所述三向应变花41也随之发生形变,所述三向应变花41的电阻发生改变,导致所述惠斯通电桥电路上检流计通过的电流也将变化,所述测量电桥将所述阻值变化通量转变为电流变化值,从而得到电信号,便于后续的数据处理。
75.进一步的,所述惠斯通电桥电路的四个电阻臂处于不平衡状态时,可以准确将阻
值变化通量转变为电信号,方便进行数据处理分析。
76.s13:所述电信号经过信号处理后,得到数字信号。
77.具体的,图11示出了本发明实施例中信号处理方式流程图,所述信号处理方式包括:
78.s131:通过所述信号放大器对所述电信号进行放大增强,得到放大后的电信号。
79.具体的,所述信号处理包括将所述电信号依次经过所述信号放大器92、信号调理器93和模数转换器94,所述信号放大器92将所述电信号放大增强,通过所述测量电桥91转变得到的电信号比较微弱,经过所述信号放大器92的放大增强后,得到放大后的电信号,才能满足后续信号处理分析需求。
80.s132:将所述放大后的电信号输入所述信号调理器中,经过信号调理后得到标准的电信号。
81.具体的,图12示出了本发明实施例中信号调理器结构示意图,所述信号调理器93包括降噪电路931、滤波电路932和整形电路933,所述降噪电路931对所述放大后的电信号进行降噪处理,减少抛光过程中设备振动的工作噪音对信号检测的影响,所述滤波电路932对所述电信号进行滤波处理,减少干扰信号的干扰,所述整形电路933将所述电信号整形为标准的电信号,便于后续处理。
82.s133:将所述标准的电信号输入所述模数转换器,通过模数转换后得到数字信号。
83.具体的,所述标准的电信号为模拟信号,通过所述模数转换器94,将所述标准的电信号转变为数字信号,便于进行数据分析处理。
84.s14:所述数字信号传输到所述控制器,所述控制器根据所述数字信号运算生成控制信号。
85.具体的,所述控制器为力位混合控制器,能够根据所述数字信号,分析运算所述柔性抛光装置的受力情况,并根据所述柔性抛光装置的受力情况生成对应的控制信号。
86.具体的,所述控制器的控制策略可以分为阻抗控制、力位混合控制、自适应控制和智能控制。
87.具体的,所述阻抗控制指根据所述工业机器人8的工作端位置和作用力之间的关系进行控制,主要在所述工业机器人8的工作端上施加作用力,使得所述柔性抛光装置能够基于该作用力移动。所述阻抗控制主要用以所述柔性抛光装置与工件初接触时,通过阻抗控制使得所述柔性抛光装置与工件之间的接触达到抛光需求。
88.具体的,所述力位混合控制是指允许所述柔性抛光装置在部分自由度上进行力的调整,以及在部分自由度上进行位置的调整,即根据所述柔性抛光装置的形变量,对所述柔性抛光装置进行力和位置上的调整,使得所述柔性抛光装置能够适应工件的表面形貌。
89.具体的,所述自适应控制是指在抛光过程中,根据所述柔性抛光装置反馈的形变量,调整所述工业机器人的位姿,并根据调整后的位姿反馈的形变量,进行迭代调整,适用于工件表面形貌变化不大的情况下,可以做到精准的抛光操作,提高加工质量。
90.进一步的,所述控制器还可以通过导纳控制、智能控制、鲁棒控制、学习控制等方法生成控制指令。
91.进一步的,所述控制器根据实际操作情况,选取合适的控制方式生成相应的控制信号。
92.s15:所述反馈调节装置将所述控制信号发送到所述工业机器人的cpu组件81上,所述cpu组件81根据所述控制信号调整所述工业机器人的动作。
93.具体的,所述cpu组件81通过i/o接口连接所述控制器,所述控制器将所述控制信号输入到所述cpu组件81内。
94.进一步的,所述cpu组件81接收到所述控制信号,根据所述控制信号针对所述工业机器人8的各个关节生成控制指令,所述工业机器人8根据所述控制指令完成不同的动作,从而调整所述柔性抛光装置的位置,使得所述柔性抛光装置能够适应工件的表面形貌,保证加工质量。
95.具体的,所述柔性抛光系统通过设置三向应变花41以阻值变化通量的形式收集所述柔性抛光装置的弹性形变状况,通过将所述阻值变化通量转变为电信号,经过放大、降噪、滤波、整形和模数转换等操作,得到数字信号,并根据所述数字信号生成所述工业机器人各个关节部位的控制信号,从而控制所述工业机器人的动作,调整所述柔性抛光装置的位置,达到工业机器人的柔顺控制。
96.本发明实施例提供了一种柔性抛光系统及控制方法,所述柔性抛光系统设置有柔性抛光装置,能够根据工件表面形貌进行自身位姿调整适应,达到被动柔性控制的效果,在所述柔性抛光装置上设置有三向应变花41,收集所述柔性抛光装置的弹性形变信息,通过反馈调节装置进行分析,并对应生成工业机器人各个关节的控制信号,达到工业机器人的主动柔性控制,结合被动柔性控制和主动柔性控制,保证抛光加工的质量和抛光加工的安全性。
97.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器(rom,readonly memory)、随机存取存储器(ram,random access memory)、磁盘或光盘等。
98.另外,以上对本发明实施例所提供的一种柔性抛光系统及控制方法进行了详细介绍,本文中应采用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。