技术特征:
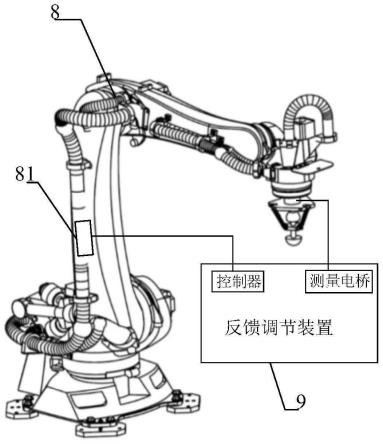
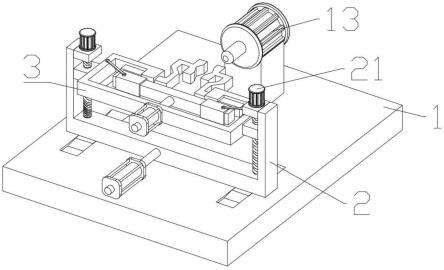
1.一种柔性抛光系统,其特征在于,所述柔性抛光系统包括柔性抛光装置、工业机器人和反馈调节装置,所述柔性抛光装置固定在所述工业机器人的工作端上;所述柔性抛光装置包括抛光头机构、法兰盘固定座和若干个弹性调节机构,所述抛光头机构基于球铰连接在所述法兰盘固定座上,所述若干个弹性调节机构均匀布置在所述抛光头机构和所述法兰盘固定座之间;所述柔性抛光装置上设置有三向应变花,所述三向应变花基于连接电线接入所述反馈调节装置;所述工业机器人包括cpu组件,所述反馈调节装置与所述cpu组件连接。2.如权利要求1所述的柔性抛光系统,其特征在于,所述柔性抛光装置包括抛光头机构、法兰盘固定座和若干个弹性调节机构,所述抛光头机构基于球铰连接在所述法兰盘固定座上,所述若干个弹性调节机构均匀布置在所述抛光头机构和所述法兰盘固定座之间。3.如权利要求2所述的柔性抛光系统,其特征在于,所述弹性调节机构包括弹簧导杆和压缩弹簧,所述压缩弹簧套接在所述弹簧导杆上。4.如权利要求2所述的柔性抛光系统,其特征在于,所述柔性抛光装置还包括法兰盘,所述法兰盘的一端固定在所述法兰盘固定座上,所述法兰盘的另一端基于螺栓连接固定在所述工业机器人的工作端上。5.如权利要求4所述的柔性抛光系统,其特征在于,所述三向应变花粘贴固定在所述法兰盘的圆周侧壁上。6.一种柔性抛光控制方法,其特征在在于,所述柔性抛光控制方法适用于如权利要求1至5任一所述的柔性抛光系统,所述控制方法包括:所述三向应变花根据所述柔性抛光装置的弹性形变生成自身的阻值变化通量,并将所述阻值变化通量传输到所述反馈调节装置上;所述阻值变化通量经过所述测量电桥,转换为电信号;所述电信号经过信号处理后,得到数字信号;所述数字信号传输到所述控制器,所述控制器根据所述数字信号运算生成控制信号;所述反馈调节装置将所述控制信号发送到所述工业机器人的cpu组件上,所述cpu组件根据所述控制信号调整所述工业机器人的动作。7.如权利要求6所述的柔性抛光控制方法,其特征在于,所述阻值变化通量经过所述测量电桥,转换为电信号,包括:所述测量电桥为惠斯通电桥,所述三向应变花接入所述惠斯通电桥;所述三向应变花基于所述柔性抛光装置弹性形变的阻值变化通量,通过所述惠斯通电桥转变为电信号。8.如权利要求6所述的柔性抛光控制方法,其特征在于,所述电信号经过信号处理后,得到数字信号,包括:所述反馈调节装置设置有信号放大器、信号调理器和模数转换器;通过所述信号放大器对所述电信号进行放大增强,得到放大后的电信号;将所述放大后的电信号输入所述信号调理器中,经过信号调理后得到标准的电信号;将所述标准的电信号输入所述模数转换器,通过模数转换后得到数字信号。9.如权利要求8所述的柔性抛光控制方法,其特征在于,将所述放大后的电信号输入所
述信号调理器中,经过信号调理后得到标准的电信号,包括:将所述放大后的电信号依次经过降噪、滤波、整形处理后,得到标准电信号。10.如权利要求6所述的柔性抛光控制方法,其特征在于,所述控制器的控制策略分为阻抗控制、力位混合控制和自适应控制。
技术总结
本发明公开了柔性抛光系统及控制方法,所述柔性抛光系统包括柔性抛光装置、工业机器人和反馈调节装置,柔性抛光装置固定在工业机器人的工作端上;柔性抛光装置包括抛光头机构、法兰盘固定座和若干个弹性调节机构,抛光头机构基于球铰连接在法兰盘固定座上,若干个弹性调节机构均匀布置在抛光头机构和法兰盘固定座之间;柔性抛光装置上设置有三向应变花,三向应变花基于连接电线接入反馈调节装置;工业机器人包括CPU组件,反馈调节装置与CPU组件连接。该控制方法通过设置三向应变花配合反馈调节装置进行抛光主动反馈控制,通过被动柔性抛光机构进行抛光形状被动自适应,主动柔性抛光和被动柔性抛光的结合保证了抛光加工的质量和安全性。和安全性。和安全性。
技术研发人员:李文威 陈樱 黄伟溪 周磊 徐利华
受保护的技术使用者:华南智能机器人创新研究院
技术研发日:2022.04.21
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。