1.本实用新型涉及筒体焊接加工领域,具体涉及一种筒体外部自动焊接设备。
背景技术:
2.如图1所示的这样,目前传统的搅拌设备搅拌腔都是由一个大筒体一个锥体以及一个小筒体相互焊接而成的,如果采用筒体平放(即卧式焊接)的方式焊接,则因搅拌设备的筒体材料壁厚较薄(常用材料壁厚为0.2~6mm左右),筒体会受自身重量影响发生形变,筒体整体形变成鹅卵形,便导致筒体跟锥体的结合缝隙极大,无法焊接;
3.所以目前传统工艺是需要把大筒体立在地面上,锥体用天车吊装起来,把锥体吊装至大筒体上方然后拼合起来进行人工焊接的;
4.但以上传统加工工艺存在以下问题:
5.一、如果加工较为大型的搅拌设备时候,筒体与锥体两者的高度较高时,天车因受加工车间的高度所限,往往吊装不了锥体至筒体上方,需另外的设备吊装,加工过程十分麻烦;
6.二、目前传统的加工工艺仍采用人手焊接筒体与锥体,效率不佳,加工过程十分耗时;
7.三、利用人手焊接,因每位焊接人员的焊接能力不一,所以对焊接质量难以标准化管理,需花费更多的检测工序对每位焊接人员所焊接的筒体进行检测,检测过程十分耗时。
技术实现要素:
8.为解决现有技术存在的不足,本实用新型提供了一种筒体外部自动焊接设备及方法。
9.本实用新型的技术方案为:
10.本实用新型提供了一种筒体外部自动焊接设备,一种筒体外部自动焊接设备,其特征在于,包括:
11.机架;所述机架尾段放置有驱动部件形成为驱动区域,机架前段安装有可拆卸的轴支撑架,轴体放置在机架上,并通过驱动部件传动带动轴体作旋转运动,轴体头部被轴支撑架所支撑,使轴体呈平行放置并可旋转的状态;
12.在轴体中部上间隔安装有两个撑圆部件,用于对待焊接工件撑圆,在每个撑圆部件朝向轴体头部的一面外侧均在轴体上套有撑圆套管,所述轴体在撑圆套管后方对称安装有撑圆动力装置,用以带动撑圆套管向撑圆部件方向位移伸出或回缩,在轴体上最靠轴体头部的撑圆部件外安装有输送管导向锥,用以推动焊接后的工件松脱;在轴体上靠轴体头部的位置依次可拆卸地套设装配有压板和顶锥,顶锥将待焊接工件向另一待焊接工件处抵近,使两者紧密对接;压板将待焊接工件向另一待焊接工件处抵近,使两者紧密对接;
13.自动连续焊接机;设置在机架外侧,把焊枪嘴对应在待焊工件的结合缝隙处进行焊接。
14.优选的,所述撑圆套管的端部呈倾斜状;
15.所述撑圆部件包括:固定背板以及活动连接在固定背板上并可以沿固定背板表面径向伸张和回缩的扇形面板;所述的扇形面板具有偶数块,相互拼合而成一个整体的圆形;
16.每个扇形面板上均设有腰型孔,在固定背板相对应腰型孔的位置开有第一连接孔;
17.每个扇形面板上均间隔设置有加强筋条,每两个相邻的加强筋条之间穿过一根固定杆,在固定杆和撑圆套管之间钩接有拉力回弹件。
18.优选的,每个扇形面板贴合轴体的尾端部均呈内倾的圆弧形,即每个扇形面板的尾端部均呈与对应的撑圆套管端部相配合的、向内凹进的圆弧形;在撑圆套管位移伸出时,通过与扇形面板尾端部的配合可撑开扇形面板,把待焊接工件撑圆。
19.优选的,固定背板中间开孔的边缘形成有一个内凹的限位腔,在撑圆套管位移伸出撑开扇形面板时起限位作用。
20.优选的,扇形面板的头端部边缘为倒角设计,其倒角处的棱角即为两个待焊接工件首尾两端对接的结合缝隙。
21.优选的,所述输送管导向锥的端部呈倾斜状,所述轴体在撑锥套管后方对称安装有输送管导向动力装置,该输送管导向动力装置装置与撑圆动力装置方向相背向,该输送管导向动力装置用以带动输送管导向锥往轴体头部方向位移伸出或回缩。
22.优选的,所述顶锥朝向撑圆部件的端部呈倾斜状,所述压板朝向撑圆部件的端部呈平面状,在轴体头部的位置安装有第一动力装置,其第一动力装置与轴体内腔中的传动杆相连接,用以带动传动杆位移伸出或回缩,所述轴体外部在对应压板和顶锥的位置贯通开设有第一限位孔和第二限位孔,所述的第一限位孔和第二限位孔贯通穿过传动杆,所述顶锥的外壁在对应第一限位孔的位置开设有相配合的第三限位孔;所述压板的外壁在对应第二限位孔的位置开设有相配合的第四限位孔。
23.本实用新型所达到的有益效果为:本实用新型采用了自动焊接设备进行对搅拌设备的大筒体、锥体和小筒体焊接,解决了加工较为大型的搅拌设备时候,筒体与锥体两者的高度较高时,天车因受加工车间的高度所限,往往吊装不了锥体至筒体上方,需另外的设备吊装,加工过程十分麻烦的问题;
24.采用连续焊机进行自动焊接,无需人手焊接筒体与锥体,效率更高,加工过程更快;
25.采用连续焊机进行自动焊接,焊接质量可以标准化管理,检测过程也可更快速;
26.采用了撑圆部件对筒体进行撑圆再进行焊接,避免出现筒体发生形变的问题,尤其是针对于大内径的筒体进行焊接时,可以令焊接精度更高。
附图说明
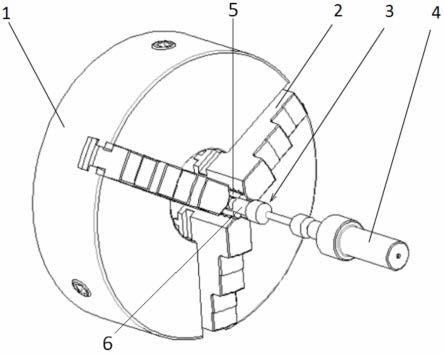
27.图1是传统的搅拌设备搅拌腔及其工件的结构示意图。
28.图2是本实用新型的整体结构侧视示意图。
29.图3是本实用新型的整体结构正视示意图。
30.图4是本实用新型的装配有焊接工件的结构侧视示意图。
31.图5是本实用新型的轴体、撑圆部件、撑圆套管、输送管导向锥、顶锥和压板的结构
示意图。
32.图6是本实用新型的固定背板结构示意图。
33.图7是本实用新型的的轴体、撑圆部件、撑圆套管、输送管导向锥、顶锥和压板的结构截面示意图。
34.图8是图7中a处的局部放大示意图。
35.图9是图7中b处的局部放大示意图。
36.图10是图4中c处的局部放大示意图。
37.图11是本实用新型另一实施例装配有焊接工件的结构正视示意图。
38.图12是本实用新型另一实施例装配有焊接工件的结构俯视示意图。
39.图13是本实用新型另一实施例抛光部件对焊接工件抛光的俯视示意图。
40.图14是本实用新型另一实施例抛光部件的结构正视示意图。
41.图15是本实用新型另一实施例的结构示意图。
42.附图中,1、机架;1000、驱动部件;1001、轴支撑架;
43.2、轴体;20、传动杆;21、第一限位孔;22、第二限位孔;
44.3、大筒体;
45.4、锥体;
46.5、小筒体;
47.6、撑圆部件;60、固定背板;600、第一连接孔;601、限位腔;
48.61、扇形面板;610、腰型孔;611、加强筋条;
49.7、撑圆套管;70、撑圆动力装置;
50.8、输送管导向锥;80、输送管导向动力装置;
51.9、压板;90、第四限位孔;
52.10、顶锥;101、第三限位孔;
53.11、第一动力装置;
54.12、自动连续焊接机;
55.13、滑动轨道;
56.14、抛光机;15、大滑板;16、中滑板;17、小滑板;18、阻挡板;19、推动部;20、滑槽。
具体实施方式
57.为便于本领域的技术人员理解本实用新型,下面结合附图说明本实用新型的具体实施方式。
58.如图2~10所示,本实用新型提供了一种筒体外部自动焊接设备,
59.包括机架1;
60.所述机架1尾段放置有驱动部件1000形成为驱动区域,机架1前段安装有可拆卸的轴支撑架1001;
61.轴体2放置在机架1上,该轴体2尾部通过驱动部件1000传动带动轴体2作旋转运动(在本实施例中,该驱动部件1000为减速电机,在其余实施例中,还可以是普通电机并通过皮带或齿轮的方式带动,由于通过驱动部件1000带动轴体2旋转的驱动方式以及结构是现有技术所以在此不再赘述),轴体2头部被轴支撑架1001所支撑,使轴体2呈平行放置并可旋
转的状态;
62.在机架1外侧设置有滑动轨道13和自动连续焊接机12,通过人工把焊枪嘴对应在待焊工件的结合缝隙后启动焊接,用于把套在轴体2上的待焊接大筒体3、锥体4和小筒体5进行旋转式圆周焊接,(在其余实施例中,该自动连续焊接机12还可以替换为自动焊接机器人,可自动寻找待焊工件的结合缝隙进行焊接),该自动连续焊接机12的底部滑动安装在滑动轨道13上;
63.在轴体2中部上间隔安装有两个撑圆部件6,
64.在每个撑圆部件6朝向轴体2头部的一面外侧均在轴体2上套有撑圆套管7,所述撑圆套管7的端部呈倾斜状,
65.所述轴体2在撑圆套管7后方对称安装有撑圆动力装置70,用以带动撑圆套管7向撑圆部件6方向位移伸出或回缩(在本实施例中,撑圆动力装置70为气缸,在其余实施例中,还可以是液压油缸或往复丝杆,由于通过动力装置带动撑圆套管7位移的驱动方式以及结构是现有技术所以在此不再赘述);
66.撑圆部件6包括:固定背板60以及活动连接在固定背板60上并可以沿固定背板60表面径向伸张和回缩的扇形面板61;
67.所述的扇形面板61具有四块,四块扇形面板61拼合而成一个整体的圆形,
68.每个扇形面板61上均设有腰型孔610,在固定背板60相对应腰型孔610的位置开有第一连接孔600,固定背板60上通过螺栓拧进第一连接孔600后,可起到使扇形面板61进行伸张和回缩时作为导向的作用;进一步,在螺栓上还可以套设圆柱弹簧,该圆柱弹簧相抵着扇形面板61,可令扇形面板61和固定背板60紧贴配合,有利于扇形面板61在固定背板60上的径向伸张和回缩(图中未视出),因为若没有安装这个圆形弹簧,可能会发生扇形面板61与固定背板60不能紧贴配合,导致扇形面板61撑开的时候发生偏移位移的问题;
69.每个扇形面板61上均间隔设置有加强筋条611,每两个相邻的加强筋条611之间穿过一根固定杆(图中未视出),在固定杆和撑圆套管7之间钩接有拉力弹簧(图中未视出)(在其余实施例中,该拉力弹簧可更换为具有拉力回弹性的橡胶带),在撑圆套管7位移回缩时,弹簧可拉动扇形面板61回缩,使被撑圆焊接后的筒体方便吊装出去;
70.每个扇形面板61贴合轴体2的尾端部均呈内倾的圆弧形,即每个扇形面板61的尾端部均呈与对应的撑圆套管7端部相配合的、向内凹进的圆弧形;
71.在撑圆套管7位移伸出时,通过与扇形面板61尾端部的配合可撑开扇形面板61,即把待焊接的大筒体3撑圆,
72.固定背板60中间开孔的边缘形成有一个内凹的限位腔601,用于在撑圆套管7位移伸出撑开扇形面板61的时候起到一个限位的作用,避免撑圆套管7过于伸入,导致扇形面板61撑开幅度过大,撑裂大筒体3的问题;
73.扇形面板61的头端部边缘为倒角设计,其倒角处的棱角即为大筒体3首端与锥体4尾端紧密对接的结合缝隙,该扇形面板61头端部的倒角边缘也可以起到一个让锥体4尾端定位的作用,便于焊接。
74.在轴体2上最靠轴体2头部的撑圆部件6外安装有输送管导向锥8;
75.该输送管导向锥8套在轴体2上,所述输送管导向锥8的端部呈倾斜状,
76.所述轴体2在撑锥套管后方对称安装有输送管导向动力装置80,该输送管导向动
力装置80装置与撑圆动力装置70方向相背向,该输送管导向动力装置80用以带动输送管导向锥8往轴体2头部方向位移伸出或回缩(在本实施例中,输送管导向动力装置80为气缸,在其余实施例中,还可以是液压油缸或往复丝杆,由于通过动力装置带动输送管导向锥8位移的驱动方式以及结构是现有技术所以在此不再赘述);
77.在轴体2上靠轴体2头部的位置依次可拆卸地套设装配有压板9和顶锥10;
78.该顶锥10套在轴体2上,所述顶锥10朝向撑圆部件6的端部呈倾斜状,
79.该压板9套在轴体2上,所述压板9朝向撑圆部件6的端部呈平面状,
80.在轴体2头部的位置安装有第一动力装置11,其第一动力装置11与轴体2内腔中的传动杆20相连接,用以带动传动杆20位移伸出或回缩(在本实施例中,第一动力装置11为气缸,在其余实施例中,还可以是液压油缸或往复丝杆,由于通过动力装置带动传动杆20位移的驱动方式以及结构是现有技术所以在此不再赘述);
81.所述轴体2外部在对应压板9和顶锥10的位置贯通开设有第一限位孔21和第二限位孔22,所述的第一限位孔21和第二限位孔22贯通穿过传动杆20,
82.所述顶锥10的外壁在对应第一限位孔21的位置开设有相配合的第三限位孔101;所述压板9的外壁在对应第二限位孔22的位置开设有相配合的第四限位孔90。
83.如图11~14所示的一种筒体外部自动焊接设备另一实施例中,在机架1外的另一侧同样设置有滑动轨道13,以及在对应自动连续焊机12的位置设置有抛光部,该抛光部的底部滑动安装在机架1外另一侧的滑动轨道13上;
84.所述的抛光部包括抛光机14,大滑板15、中滑板16和小滑板17,所述抛光机14侧向安装在小滑板17上,所述小滑板17与中滑板16通过滑槽20连接,所述中滑板16与大滑板15通过滑槽20连接,抛光机14的抛光轮中心轴线,与被焊接工件的中心轴线水平,处在同一中心轴线上;
85.在中滑板16上设置有阻挡板18,在小滑板17与阻挡板18之间的位置放置有推动部19,推动部19推动抛光机14抵靠在自动连续焊接机12焊接后的焊缝上进行抛光(该推动部在本实施例中为弹簧,弹簧收缩变形后释放进而推动小滑板17,进而使抛光机14抵靠在自动连续焊接机12焊接后的焊缝上进行抛光,在其余实施例中,还可以为微型气缸或微型滚珠丝杆等可推动小滑板17的装置);
86.由于轴体2是通过机架的驱动部件1000传动带动轴体2作旋转运动的,即轴体2上的大筒体3、锥体4和小筒体5进行旋转式圆周焊接时,位于自动连续焊接机12对面的抛光部件可以对焊接后的焊缝上进行抛光,抛光机的旋转方向为与轴体2旋转方向相切,更结合上抛光机14的抛光轮中心轴线,与被焊接工件的中心轴线水平,处在同一中心轴线上的结构,这会使抛光机的抛光效果更好,既能让连续焊机进行连续焊接,又可同时进行抛光,;
87.如图12和13所示的这样,采用了三段式的滑板连接结构,可让抛光机14抛光大筒体3与锥体4的焊缝,又可以抛光锥体4与小筒体5的焊缝。
88.如图15所示的一种筒体外部自动焊接设备另一实施例中,根据上述实施例所记载的结构以及原理,在某些应用场景中,当需要进行立式焊接时,可以进行相应的结构改造,如更换一个底座,把轴体2立起来安装固定在上面,然后相应的撑圆部件6套装在轴体上,可对筒体进行立式焊接,适用性更广。
89.在其余的一些实施例中,本实用新型中的自动焊接设备不限于大筒体、锥体和小
筒体这样三段式的工件焊接应用场景,根据上述实施例所记载的结构以及原理,可以根据实际要求进行相应的结构改造,例如在轴体上增加更多的撑圆部件,可应用在多段的圆形筒体之间的焊接;或把撑圆部件的扇形面板的头端部边缘两侧均进行倒角,使两个相镜像的锥体之间进行焊接。
90.本实用新型在使用时,步骤如下:
91.自动焊接设备的机架1前段的轴支撑架1001卸下;
92.把焊好纵缝的大筒体3横向吊装进入机架1并放置在撑圆部件6上,把焊好纵缝的锥体4横向吊装进入机架1,其锥体4的尾端抵在最靠近轴体2头部的撑圆部件6倒角处,锥体4的首端抵在顶锥10处,启动撑圆动力装置70,撑圆套管7位移伸出,通过与扇形面板61尾端部的配合可撑开扇形面板61,大筒体3首尾两端内部被撑圆,在顶锥10的第三限位孔101和第一限位孔21穿过限位杆,启动第一动力装置11,顶锥10将锥体4尾端向大筒体3首端处抵近,使两者紧密对接;
93.自动焊接设备的机架1前段的轴支撑架1001支撑着轴体2头部;
94.启动机架1的驱动部件1000传动带动轴体2作旋转运动,把焊枪嘴对应在待焊工件的结合缝隙后启动焊接,进行初步点焊固定位置,再进行连续焊接;
95.锥体4和大筒体3焊接完成后,暂停机架1的驱动部件1000;
96.撑圆动力装置70退回,撑圆套管7位移回缩,扇形面板61同步回缩,第一动力装置11退回,将顶锥10卸下,启动输送管导向动力装置80使输送管导向锥8往轴体2头部方向位移伸出,锥体4和大筒体3松脱;
97.将自动焊接设备的机架1前段的轴支撑架1001卸下,小筒体5横向吊装进入机架1中,将压板9放入,再将轴支撑架1001重新支撑着轴体2头部,在压板9的第四限位孔90和第二限位孔22穿过限位杆,启动第一动力装置11,压板9将小筒体5尾端向锥体4首端处抵近,使两者紧密对接;
98.启动机架1的驱动部件1000传动带动轴体2作旋转运动,把焊枪嘴对应在待焊工件的结合缝隙后启动焊接,进行初步点焊固定位置,再进行连续焊接;
99.小筒体5和锥体4焊接完成后,暂停机架1的驱动部件1000;
100.自动焊接设备的机架1前段的轴支撑架1001卸下;
101.第一动力装置11退回,将压板9卸下,将通过大筒体3、锥体4和小筒体5焊接完成后形成一体的工件吊装向外移走,再进行下一个组件组焊,如此往复。
102.本实用新型采用了卧式自动焊接设备进行对搅拌设备的大筒体3、锥体4和小筒体5焊接,解决了加工较为大型的搅拌设备时候,筒体与锥体4两者的高度较高时,天车因受加工车间的高度所限,往往吊装不了锥体4至筒体上方,需另外的设备吊装,加工过程十分麻烦的问题;
103.采用连续焊机进行自动焊接,无需人手焊接筒体与锥体4,效率更高,加工过程更快;
104.采用连续焊机进行自动焊接,焊接质量可以标准化管理,检测过程也可更快速;
105.采用了撑圆部件6对大筒体3进行撑圆再进行焊接,避免出现大筒体3发生形变的问题,尤其是针对于大内径的筒体进行焊接时,可以令焊接精度更高,例如焊接内径为2050mm的筒体时,筒体的焊接精度可达
±
0.15mm。
106.以上所述的本实用新型实施方式,并不构成对本实用新型保护范围的限定。任何在本实用新型的精神和原则之内所作的修改、等同替换和改进等,均应包含在本实用新型的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。