1.本发明涉及机械自动化技术领域,尤其涉及一种座椅托盘调节机构的自动装配设备。
背景技术:
2.对于现有的办公椅和休闲椅来说,往往是通过座椅托盘来实现其倾仰功能以及对倾仰进行调节。
3.公开号为cn201542121u的中国专利文献公开了一种双锁定椅用托盘,包括安装在转椅上的底盘,底盘通过支轴连接有壳体,壳体内设有调节螺母,调节螺母下端连接有弹簧,壳体内设有活动座,活动座内插接有锥形管,锥形管与活动座之间这有锥形固定板,底盘、壳体的侧壁穿接有可旋转并轴向移动的调节杆,调节杆内端插接在活动座内部并连接有可接触气压棒的调节板,调节杆的杆身上连接有限位件,限位件一端连接有可扣在底盘侧壁边缘的锁片。
4.由于其结构的优良性,该专利文献中的座椅托盘占据了广阔的市场份额。
5.但目前该座椅托盘基本上都是由人工组装完成,这样不仅提高了座椅托盘的组装成本,而且也费时费力,效率低下。
6.对于本领域技术人员来说,若要完成对座椅托盘的自动化装配,需要将调节机构自动装配到待装配托盘上,但目前并没有调节机构的自动装配设备。
技术实现要素:
7.为了解决上述问题,本发明的目的在于克服上述技术问题,提供一种座椅托盘调节机构的自动装配设备,从而实现座椅托盘调节机构的自动化装配。
8.为了达到上述的目的,本发明采用了以下的技术方案:
9.一种座椅托盘调节机构的自动装配设备,所述调节机构包括螺纹杆以及套设在螺纹杆上的压簧、塑料套、塑料盖、调节螺母、成型垫片和平垫片;
10.该自动装配设备包括螺纹杆组装装置、塑料套组装装置、弹簧组件组装装置、塑料盖装配装置、第一托盘输送机构、第三托盘输送机构、第三装配工位、第四驱动组件、形成闭环的滑轨件、第一进料工位、第四装配工位、第五装配工位、第六装配工位、第七装配工位和第一出料工位;
11.所述螺纹杆组装装置于第三装配工位处将螺纹杆组装至待装配托盘上,所述第一托盘输送机构将待装配托盘从第三装配工位送至第一进料工位,所述塑料套组装装置于第四装配工位处将塑料套空套在螺纹杆上,所述弹簧组件组装装置于第五装配工位处将压簧、成型垫片和平垫片套在螺纹杆上,所述塑料盖装配装置于第七装配工位处将塑料盖中的调节螺母与螺纹杆螺纹配合;所述第三托盘输送机构将第一出料工位中的待装配托盘送走;
12.其中,所述第一进料工位、第四装配工位、第五装配工位、第七装配工位和第一出
料工位中均设有一用于放置待装配托盘的第四装配板,所述第四驱动组件驱动第四装配板沿滑轨件移动,以使得滑轨件上的第四装配板依次在第一进料工位、第四装配工位、第五装配工位、第七装配工位和第一出料工位之间流转。
13.作为优选,所述第四驱动组件通过链条、同步带或钢丝绳来驱动所有的第四装配板在滑轨件上滑动。
14.作为优选,所述第四驱动组件包括第四驱动电机、主动齿轮、被动齿轮和链条;所述链条为闭环式链条并与主动齿轮和被动齿轮传动连接,所述第四装配板与链条连接,所述第四驱动电机通过驱动链条移动从而带动所有的第四装配板沿滑轨件移动。
15.作为优选,所述滑轨件的内侧壁上设有一形成闭环的第一轨道,所述滑轨件的外侧壁上设有一形成闭环的第二轨道;
16.所述第四装配板上安装有两个滚轮,其中一个滚轮用于在第一轨道内滚动,另一个滚轮用于在第二轨道内滚动。
17.作为优选,在第一进料工位、第四装配工位、第五装配工位、第七装配工位和/或第一出料工位旁边还设有定位组件,所述定位组件包括安装第三转动驱动件和第六支架,所述第六支架上转动安装有第一定位件;
18.所述第四装配板上设有一定位槽;
19.所述第三转动驱动件驱动第一定位件转动从而与第四装配板上的定位槽配合。
20.作为优选,所述定位组件还包括第二转动轴和连接件,所述第二转动轴转动安装在第六支架上,所述连接件和第一定位件安装在第二转动轴上,所述连接件与第三转动驱动件的活动端铰接。
21.作为优选,所述滑轨件包括曲线型的第一滑轨段、曲线型的第二滑轨段、直线型的第三滑轨段和直线型的第四滑轨段,所述第一滑轨段的两端分别与第三滑轨段和第四滑轨段的一端相连,所述第二滑轨段的两端分别与第三滑轨段和第四滑轨段的另一端相连,所述第一进料工位和第一出料工位位于第三滑轨段一侧,所述第四装配工位、第五装配工位和第七装配工位位于第四滑轨段一侧。
22.作为优选,还设有第六装配工位和润滑脂添加装置,所述第六装配工位位于第五装配工位和第七装配工位之间,所述第六装配工位中设有第四装配板,所述第四驱动组件驱动第四装配板沿滑轨件移动,以使得滑轨件上的第四装配板依次在第一进料工位、第四装配工位、第五装配工位、第六装配工位、第七装配工位和第一出料工位之间流转。
23.作为优选,所述第四装配板上设有若干用于放置待装配托盘的第四定位柱;
24.所述第四装配板的上表面倾斜设置以使得待装配托盘中的活动座上的第四圆孔竖直;
25.所述第四装配板的上表面还固定安装或一体成型有一用于顶住待装配托盘中螺纹杆的第四安装座。
26.作为优选,所述螺纹杆组装装置包括用于提供螺纹杆的第二振动送料机构和第二组装机构,所述第二组装机构位于第三装配工位的一侧,所述第二组装机构将第二振动送料机构处的螺纹杆送至第三装配工位处,并能够将螺纹杆的轴端以从下往上的方式穿过活动座上的第四圆孔;
27.所述塑料套组装装置包括第二振动盘、第二送料轨道、第三移送机构和第二副机
架,所述第二振动盘和第二送料轨道位于第四装配工位的一侧,所述第二振动盘用于将塑料套送至第二送料轨道上,所述第二副机架位于第四装配工位的另一侧,所述第二副机架上安装有第二对准组件和第三对准组件,所述第三对准组件位于第二对准组件的上方,所述第三移送机构将位于第二振动轨道出料口的塑料套移送至第二对准组件上,并使得塑料套空套在螺纹杆上,所述第二对准组件将待装配托盘中的螺纹杆夹持以使得螺纹杆竖放后再松开,所述第三对准组件将位于第二对准组件上的塑料套夹持以使得塑料套竖放后再松开,从而完成对塑料套的组装;
28.所述弹簧组件组装装置包括第六组装机构、第三夹送机构、第四夹送机构、第一输送轨道、压簧送料机构、成型垫片送料机构和平垫片送料机构,所述第一输送轨道上依次设有第一工位、第二工位、第三工位和第四工位,所述第四夹送机构包括三个第七夹持组件和用于驱动三个第七夹持组件移动的第二驱动件,所述压簧送料机构将压簧竖放在第一工位上,所述成型垫片送料机构于第二工位处将成型垫片平放压簧上,所述平垫片送料机构于第三工位处将平垫片平放在压簧以及成型垫片上从而形成弹簧组件,所述三个第七夹持组件分别将位于第一工位上的压簧、第二工位上的压簧和成型垫片、第三工位上的弹簧组件夹持后,由所述第二驱动件驱动三个第七夹持组件移动,并将位于第一工位上的压簧、第二工位上的压簧和成型垫片、第三工位上的弹簧组件分别送至第二工位、第三工位、第四工位,所述第六组装机构用于使得待装配托盘上的螺纹杆竖直,以及使得待装配托盘上的塑料套竖直,进而使得第三夹送机构能够将位于第四工位上的弹簧组件夹送到待装配托盘上,并使得弹簧组件位于塑料套内,并套在螺纹杆上;
29.所述塑料盖装配装置包括第五送料机构、第一驱动机构、第四组装机构和装配机械手,所述第五送料机构用于将开口朝下的塑料盖送出,所述第四组装机构使得待装配托盘中的螺纹杆竖直;所述第一驱动机构驱动装配机械手移动,以使得装配机械手将第五送料机构上的塑料盖夹持后再与螺纹杆螺纹配合从而将塑料盖装配在第七装配工位处的待装配托盘上。
30.本发明的有益效果为:通过滑轨件上的第四装配板依次在进料工位、第四装配工位、第五装配工位、第六装配工位、第七装配工位和出料工位之间流转,能够使得第一托盘输送机构、第二托盘输送机构、塑料套组装装置、弹簧组件组装装置和塑料盖装配装置的位置分布合理,从而实现座椅托盘调节机构的自动化装配。
附图说明
31.图1为本技术实施例中座椅托盘的自动生产线的示意图;
32.图2为本技术实施例中锁定机构装配装置的示意图;
33.图3为本技术实施例中锁定机构装配装置于第一装配工位处组装扭簧组件和连接杆的示意图一;
34.图4为本技术实施例中锁定机构装配装置于第一装配工位处组装扭簧组件和连接杆的示意图二;
35.图5为本技术实施例中拨动组件和第二夹持组件的配合示意图;
36.图6为本技术实施例中锁定机构装配装置于第二装配工位处装配扭簧组件和连接杆的示意图;
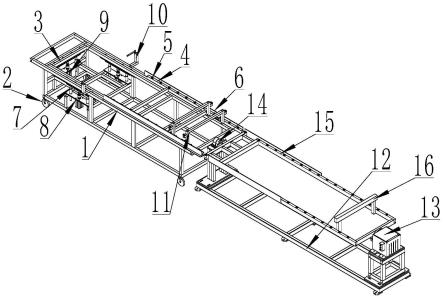
37.图7为本技术实施例中装配调节机构的示意图;
38.图8为本技术实施例中第二托盘输送机构的结构示意图;
39.图9为本技术实施例中第四装配板的结构示意图;
40.图10为本技术实施例中螺纹杆组装装置于第三装配工位处组装螺纹杆的示意图;
41.图11为本技术实施例中塑料套组装装置于第四装配工位处组装塑料套的示意图;
42.图12为本技术实施例中第三夹送机构的结构示意图;
43.图13为本技术实施例中弹簧组件组装装置的结构示意图(省略第三夹送机构);
44.图14为本技术实施例中第四组装机构于第五装配工位处组装弹簧组件的示意图;
45.图15为本技术实施例中塑料盖装配装置的结构示意图(省略一个装配机械手);
46.图16为本技术实施例中装配机械手的结构示意图;
47.图17为本技术实施例中压铆、对位、铰孔和装配把手件的示意图;
48.图18为本技术实施例中自动压铆机构的示意图;
49.图19为本技术实施例中自动对位机构的示意图;
50.图20为本技术实施例中自动铰孔机构的示意图;
51.图21为本技术实施例中把手装配装置的示意图(省略第六送料机构);
52.图22为本技术实施例中第一托盘输送机构的结构示意图;
53.图23为本技术实施例中第三托盘输送机构的结构示意图;
54.图24为本技术实施例中第四托盘输送机构的结构示意图;
55.图25为本技术实施例中第五托盘输送机构的结构示意图;
56.图26为本技术实施例中座椅托盘的爆炸示意图;
57.图27为本技术实施例中扭簧组件的示意图;
58.图28为本技术实施例中把手件的示意图。
59.附图标记说明:10、第一输送线;11、第二输送线;101、定位块;
60.20、第一机架;21、第一托盘输送机构;210、第一副机架;2101、第一滑轨;211、第一机械手;212、第二机械手;213、第三机械手;214、第四机械手;2120、机械手基板a;2121、机械手升降驱动件;2122、机械手旋转驱动件;2123、夹送组件;2140、机械手基板b;2142、第二升降驱动件;2143、第一安装座;2144、第三升降驱动件;2145、第五夹持组件;2146、第六夹持组件;215、第一驱动电机;
61.22、锁定机构装配装置;220、第一存储机构;221、第一夹送机构;222、三维驱动组件;2218、第一夹持驱动件;223、第二夹持组件;2230、第二夹持驱动件;2231、第二夹持件;22310、第二夹持部;22311、第三夹持部;22312、第二凹槽;224、第一抵挡组件;2242、第二移动驱动件;2243、第一抵挡件;225、拨动组件;2251、第一移动驱动件;2252、第二支架;2253、第一转动驱动件;2254、第三转动座;2255、拨动件;22550、拨动缺口;
62.230、第一送料机构;
63.241、第一推动组件;2410、第一推动件;2411、第五移动驱动件;242、第一承接组件;2420、第一承接件;2421、第一承接驱动件;24201、第一承接槽;24202、第二承接槽;245、第三支架;243、第一对准组件;2430、第一对准杆;2431、第四移动驱动件;244、第四支架;2441、对准滑道;
64.250、第一压铆电机;251、第一旋动力头;252、第六移动驱动件;253、第二顶紧件;
65.26、第一装配工位;261、第一托架;262、第一托槽;263、第一弹簧;
66.27、第二装配工位;
67.30、第二机架;301、第一进料工位;302、第四装配工位;303、第五装配工位;304、第六装配工位;305、第七装配工位;306、第一出料工位;
68.31、第三装配工位;310、第五支架;311、第一装配板;3111、第一避让部;313、第一转动轴;
69.320、第四装配板;321、第四定位柱;322、第四安装座;323、定位槽;324、滚轮;
70.33、第二托盘输送机构;331、滑轨件;3311、第一滑轨段;3312、第二滑轨段;3313、第三滑轨段;3314、第四滑轨段;3302、主动齿轮;3303、被动齿轮;3304、链条;3316、第二轨道;3321、第六支架;3322、第二转动轴;3323、第一定位件;3324、连接件;3325、第三转动驱动件;
71.34、第三托盘输送机构;341、第七副机架;342、第五机械手;343、第七驱动电机;3410、第七滑轨;
72.35、螺纹杆组装装置;350、第二振动送料机构;3510、第四夹持件;352、第一直线移动驱动件;353、第二直线移动驱动件;354、第八转动驱动件;355、第九转动驱动件;
73.36、塑料套组装装置;360、第二振动盘;361、第二振动送料轨道;362、第三移送机构;3621、二维第二驱动组件;3622、第一移送组件;363、第三组装机构;3631、第二对准组件;3632、第二副机架;3633、第三对准组件;
74.37、弹簧组件组装装置;370、第三机架;371、第三夹送机构;372、第六组装机构;373、压簧送料机构;374、成型垫片送料机构;375、平垫片送料机构;3710、二维第三驱动组件;3711、第一旋转驱动件;3712、第十夹持组件;37121、第十夹持驱动件;37122、第十夹持件;37123、第三对准杆;376、第四夹送机构;3760、第一输送轨道;3761、第七夹持组件;3762、第二驱动件;
75.38、塑料盖装配装置;380、第一驱动机构;3801、第五驱动电机;3802、移动板;3803、第五副机架;3804、第五滑轨;3805、第五滑块;381、装配机械手;3811、基座;38121、升降电机;38122、导向柱;3813、第十一夹持组件;38131、第十一夹持驱动件;38132、第十一夹持件;3814、第四对准杆;38151、旋转电机;38152、第三转动轴;38153、套筒;38154、旋转头;38155、第一弹簧件;38156、联轴器;382、第四组装机构;3820、第四副机架;3821、第四对准组件;38211、第四对准驱动件;38212、第四对准件;383、第六振动盘;
76.39、润滑脂添加装置;
77.4、自动压铆机构;44、第二转盘;46、第五装配板;47、第二进料工位;48、压铆工位;49、第二出料工位;41、第二压铆电机;
78.5、自动对位机构;511、第七移动驱动件;512、第五安装座;513、对位驱动件;514、对位杆;
79.6、自动铰孔机构;61、第三转盘;611、第三进料工位;612、铰孔工位;613、第三出料工位;614、清扫工位;62、清扫组件;63、第五转动电机;64、第七装配板;65、铰孔电机;66、铰刀;621、吹气喷头;622、清扫驱动件;623、清扫支架;
80.7、把手装配装置;71、第六送料机构;72、第八装配机构;720、第八移动驱动件;721、第八承接件;723、第二抵挡件;724、第五对准驱动件;725、第五对准件;7211、定位凹
槽;7212、第二通孔;726、第二顶出杆;
81.90、第四机架;91、第四托盘输送机构;910、第八副机架;911、第六机械手;912、第七机械手;913、第八驱动电机;9100、第八滑轨;
82.92、第五托盘输送机构;920、第九副机架;921、第八机械手;922、第九机械手;923、第九驱动电机;9200、第九滑轨;
83.93、第八装配工位;
84.94、第九装配工位;
85.8、座椅托盘;80、底盘;800、第一圆孔;801、第一长孔;802、第二圆孔;81、活动座;810、第三圆孔;811、第四圆孔;82、锥形管;83、调节杆;831、第一杆部;832、第二杆部;84、把手件;841、把手底部壁;842、把手侧部壁;843、把手安装孔;85、拨片;86、连接杆;87、扭簧组件;870、连接块;8700、第一连接部;8701、第二连接部;8702、第三连接部;8703、第一通孔;8704、第一夹持孔;8705、第二夹持孔;8706、套筒部;88、调节机构;880、螺纹杆;881、压簧;882、塑料套;883、塑料盖;885、成型垫片;886、平垫片。
具体实施方式
86.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
87.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
88.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
89.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
90.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
91.在本技术中,“组装”是指零部件可拆卸的安装在待装配托盘上,“装配”是指零部
件固定安装在待装配托盘上。
92.实施例一:
93.如图26所示的一种座椅托盘8,包括底盘80、活动座81、锥形管82、调节杆83、把手件84、拨片85、用于控制座椅升降的锁定机构和用于调节座椅倾仰张力的调节机构88,所述锁定机构包括扭簧组件87和连接杆86,所述扭簧组件87包括固定连接的连接块和第一扭簧,所述活动座81通过连接杆86与底盘80铰接,所述连接块空套在所述连接杆86上,所述扭簧与连接块固定连接并能够对锥形管82产生作用力,所述调节机构88包括螺纹杆880以及套设在螺纹杆上的压簧881、塑料套882、塑料盖883、调节螺母8831、成型垫片885和平垫片886;
94.这里值得说明的是,本实施例中的座椅托盘8与背景技术中的座椅托盘8各零部件之间的安装结构以及位置结构基本相同,因此,这里不再详述座椅托盘8中各零部件之间的安装关系以及位置关系。
95.这里值得说明的是,工作人员需在先将调节杆83上用于安装把手件84的一端以从内到外的方式穿过所述第一长孔801,并使得调节杆83处于第一长孔801的顶端,然后再推动调节杆83使得调节杆83轴向移动进而使得调节杆83上的另一端以从内到外的方式穿过所述第一圆孔800,最后再将活动座81放置在底盘80上的指定位置,进而完成待装配托盘的组装;即在本技术实施例中,待装配托盘是指已完成对底盘80、活动座81和锥形管82的装配,还需完成锁定机构、调节机构88和把手件的装配,即还需完成连接杆86、扭簧组件87、螺纹杆880、塑料套882、弹簧组件的组装,然后再通过塑料盖883中的调节螺母8831与螺纹杆880螺纹配合,最后再将把手件装配在调节杆的把手端;从而完成整个座椅托盘的装配。
96.以及,将螺纹杆880组装在待装配托盘上是指螺纹杆880位于活动座81上的第四圆孔811内并大致竖直;
97.以及,将塑料套882组装在待装配托盘上是指塑料套882空套在螺纹杆880上;
98.以及,弹簧组件包括压簧881,以及位于压簧881上的成型垫片885,以及位于成型垫片885上的平垫片886,将弹簧组件组装在待装配托盘上是指压簧881空套在螺纹杆880上,以及成型垫片885套在螺纹杆880上,以及平垫片886套在螺纹杆880上。
99.如图1、图2、图7和图17所示,一种座椅托盘的自动生产线,包括主机架、第一输送线10、锁定机构装配装置22、螺纹杆组装装置35、塑料套组装装置36、弹簧组件组装装置37、润滑脂添加装置39、塑料盖装配装置38、自动压铆机构4、自动对位机构5、自动铰孔机构6、把手装配装置7、第一托盘输送机构21、第二托盘输送机构33、第三托盘输送机构34、第四托盘输送机构91、第五托盘输送机构92和第二输送线11;
100.所述主机架包括包括第一机架20、第二机架30、第三机架370和第四机架90;所述锁定机构装配装置22、螺纹杆组装装置35和第一托盘输送机构21位于第一机架20处,所述塑料套组装装置36、弹簧组件组装装置37、塑料盖装配装置38、第二托盘输送机构33和第三托盘输送机构34位于第二机架30处,并且弹簧组件组装装置37部分结构位于第三机架370处,所述自动压铆机构4、自动对位机构5、自动铰孔机构6、把手装配装置7、第四托盘输送机构91和第五托盘输送机构92位于第四机架90处。
101.所述第一机架20上设有第一装配工位26、第二装配工位27和第三装配工位31;所述锁定机构装配装置22于第一装配工位26处将扭簧组件87和连接杆86组装在待装配托盘
上,并于第二装配工位27处将扭簧组件87和连接杆86装配在待装配托盘上,所述螺纹杆组装装置35于第三装配工位31处将螺纹杆880组装至待装配托盘上。
102.所述第二机架30上设有第一进料工位301、第四装配工位302、第五装配工位303、第六装配工位304、第七装配工位305和第一出料工位306;所述塑料套组装装置36于第四装配工位302处将塑料套882空套在螺纹杆880上,所述弹簧组件组装装置37于第五装配工位303处将压簧881、成型垫片885和平垫片886套在螺纹杆880上,所述润滑脂添加装置39于第六装配工位304处将润滑脂添加到螺纹杆880上,所述塑料盖装配装置38于第七装配工位305处将塑料盖883中的调节螺母与螺纹杆880螺纹配合。
103.所述第四机架90上设有第八装配工位93和第九装配工位94,所述第八装配工位93位于自动压铆机构4和自动铰孔机构6之间,所述自动对位机构5于第八装配工位93处使得扭簧组件87位于连接杆86的中间位置;所述把手装配装置7于第九装配工位94处将把手件84套设在调节杆83上,所述自动压铆机构4用于对螺纹杆880的轴端进行压铆作业,所述自动铰孔机构6用于对锥形管82进行铰孔作业。
104.在本技术实施例中,如图1和图2,所述第一输送线10包括输送机架以及安装在输送机架上的传送带、第一传感器和输送电机,所述传送带上沿传送带的移动方向分布有多排定位块101,相邻两排定位块101之间形成用于放置待装配托盘的放置工位,所述输送电机用于驱动传送带移动以带动待装配托盘沿传送带移动,所述第一传感器用于检测待装配托盘是否输送到位。
105.在本技术实施例中,如图22所示,所述第一托盘输送机构21包括固定安装在第一机架20上的第一副机架210,以及安装在第一副机架210上的第一机械手211、第二机械手212、第三机械手213、第四机械手214和第一驱动电机215,所述第一副机架210上设有第一滑轨2101,所述第一驱动电机215驱动第一机械手211、第二机械手212、第三机械手213和第四机械手214沿第一滑轨2101移动,以使得第一机械手211将第一输送线10上的待装配托盘送至第一装配工位26,以及使得第二机械手212将待装配托盘从第一装配工位26送至第二装配工位27;以及使得第三机械手213将待装配托盘从第二装配工位27送至第三装配工位31上,以及使得第四机械手214将第三装配工位31上的待装配托盘送至第一进料工位301上。
106.在本技术实施例中,所述第一机械手211、第二机械手212和第三机械手213均包括滑动安装在第一副机架210上的机械手基板a2120、以及安装在机械手基板a2120上的机械手升降驱动件2121,以及安装在机械手升降驱动件2121的活动端上的用于夹持待装配托盘的夹送组件2123;
107.进一步优选,所述第二机械手212和第三机械手213还包括机械手旋转驱动件2122,所述机械手旋转驱动件2122安装在机械手升降驱动件2121的活动端,所述夹送组件2123安装在机械手旋转驱动件2122的活动端;
108.其中,所述第二机械手212转动待装配托盘以使得位于第二装配工位27处的待装配托盘中的调节杆83的把手端位于第二装配工位27的左侧或右侧;
109.所述第三机械手213转动待装配托盘以使得位于第三装配工位31处的待装配托盘中的调节杆83的把手端位于第三装配工位31的前侧或后侧。
110.在本技术实施例中,所述第四机械手214包括滑动安装在第一副机架210上的机械
手基板b2140,以及安装在机械手基板b2140上的第二升降驱动件2142;以及安装在第二升降驱动件2142活动端的第一安装座2143,所述第一安装座2143上安装有第三升降驱动件2144和用于夹持待装配托盘的第五夹持组件2145,所述第三升降驱动件2144的活动端上还安装有用于夹持螺纹杆880的第六夹持组件2146。
111.在本技术实施例中,如图2所示,所述锁定机构装配装置22包括第一送料机构230、第一存储机构220、第一夹送机构221、三维驱动组件222、第二夹持组件223、第一组装机构和第一压铆机构;所述第一存储机构220位于第一机架20一侧并存储有多个扭簧组件87,所述第一夹送机构221安装在第一机架20上并用于将扭簧组件87从第一存储机构220送至第二夹持组件223上,所述第二夹持组件223安装在三维驱动组件222的移动端并能够由三维驱动组件222驱动以将扭簧组件87送至第一装配工位26上的待装配托盘内的安装位置;
112.如图3和图4所示,所述第一组装机构包括第三支架245、第四支架244、第一推动组件241和第一承接组件242,所述第三支架245固定安装在第一机架20上,所述第一承接组件242安装在第三支架245上,所述第四支架244滑动安装在第一机架20上,所述第一推动组件241包括第一推动件2410和第五移动驱动件2411,所述第五移动驱动件2411安装在第三支架245上,所述第一推动件2410安装在第四支架244上,所述第一承接组件242包括第一承接驱动件2421和两个用于承接连接杆86的第一承接件2420,所述两个承接件位于第一推动件2410和第一装配工位26之间,所述第一承接驱动件2421用于驱动第一承接件2420移动并使得第一承接件2420具有用于承接连接杆86的第一停留位置,以及具有用于使得第一推动件2410具有前后移动空间的第二停留位置;并且当两个承接件位于第二停留位置时,所述第五移动驱动件2411驱动第一推动件2410推动连接杆86向第一装配工位26移动,并依次穿过底盘80上一侧的第二圆孔802、活动座81一侧的第三圆孔810、扭簧组件87上的通孔、活动座81另一侧的第三圆孔810和底盘80另一侧的第二圆孔802进而将连接杆86和扭簧组件87组装至第一装配工位26处的待装配托盘上;
113.如图6所示,所述第一压铆机构包括位于第二装配工位27左侧的第六移动驱动件252和第二顶紧件253,以及位于第二装配工位27右侧的第一压铆电机250和第一旋动力头251;所述第六移动驱动件252驱动第二顶紧件253向第二装配工位27移动以将连接杆86的帽端顶紧,以及所述第一压铆电机250驱动第一旋动力头251对连接杆86的轴端进行压铆;进而将扭簧组件87和连接杆86于第二装配工位27处装配在待装配托盘上。
114.在本技术实施例中,所述第一组装机构还设有安装在第四支架244上的第一对准组件243,所述第一对准组件243包括第一对准杆2430和第四移动驱动件2431,所述第一对准杆2430和第一推动件2410位于第一装配工位26相对的两侧;
115.其中,当两个第一承接件2420位于第一停留位置时,所述第四移动驱动件2431驱动第一对准杆2430向第一推动件2410移动并依次穿过底盘80上一侧的第二圆孔802、活动座81一侧的第三圆孔810、扭簧组件87上的通孔、活动座81另一侧的第三圆孔810和底盘80另一侧的第二圆孔802后与连接杆86插接,并使得连接杆86的帽端移动至第一推动件2410上。
116.如此设置是由于连接杆86的结构特殊性,当连接杆86处于轴端向前的水平状态时,是无法直接推动连接杆86前移的,因此,通过第一推动组件241和第一对准组件243的配合将连接杆86夹持并使得连接杆86从第一承接件2420上脱离,然后第一承接件2420移动至
第二停留位置以使得第一推动件2410具有向前移动的空间,然后再通过第一推动组件241和第一对准组件243的配合将连接杆86精准组装到待装配托盘上。
117.进一步优选,所述第一承接件2420上设有第一承接凸起和第二承接凸起,所述第一承接凸起位于第二承接凸起的前方,所述第一承接驱动件2421驱动两个第一承接件2420以相互靠近的方式移动至第一停留位置,两个第一承接件2420上的第一承接凸起配合形成用于承接连接杆86杆部的第一承接槽24201,两个第一承接件2420上的第二承接凸起配合形成用于承接连接杆86的帽端和\或杆部的第二承接槽24202;其中,连接杆86的杆部是指连接杆86的帽端与连接杆86的轴端之间的部分。
118.这里值得说明的是,关于第一承接驱动件2421驱动两个第一承接件2420相向或相背移动的传动结构,可以参考现有技术中夹持机构的传动结构,这里不再详述;
119.以及两个第一承接件2420相向或相背移动可以是在水平面上直线相向或相背移动,或者是在水平面上的转动过程中相向或相背移动,或者是两个第一承接件2420分别在竖直面上的转动过程中相向或相背移动。
120.进一步优选,所述推动件上设有一承接孔,所述承接孔与连接杆86的帽端相适配;如此设置使得第一对准杆2430能够将连接杆86的帽端推动至承接孔内。
121.进一步优选,所述连接杆86的轴端设有一锥形孔,所述锥形孔与连接杆86同轴分布,所述第一对准杆2430的后端为与所述锥形孔相适配的锥形体;如此设置,方便第一对准杆2430和连接杆86之间形成插接;另外,设置锥形孔还能方便后续对连接杆86的轴端进行铆压。
122.进一步优选,所述第一对准组件243还包括一对准块,所述对准块固定安装在第四支架244上,所述对准块和第一推动件2410分别位于第一装配工位26相对的两侧,所述对准块上设有一圆孔状的对准滑道2441,所述第一对准杆2430以能够前后滑动的方式安装在所述对准滑道2441上;这样,当待装配托盘位于第一装配工位26时,能够进一步保证第一对准杆2430能够精准对准待装配托盘上的第二圆孔802以及第三圆孔810。
123.在本发明实施例中,如图27所示,所述扭簧组件87包括连接块870以及安装在连接块870上的第一扭簧,所述连接块870包括第一连接部8700、第二连接部8701和第三连接部8702,所述第一连接部8700和第三连接部8702分别位于第二连接部8701两侧,所述第二连接部8701上设有一套筒部8706,所述通孔位于套筒部8706内,所述第一扭簧套设安装在套筒部8706上;
124.所述第一扭簧的两端分别为a端和b端,并分别位于第三连接部8702的上下两侧,所述第三连接部8702能够限制第一扭簧的a端向上转动。
125.在本技术实施例中,如图3和图5所示,所述锁定机构装配装置22还包括用于将第一扭簧的b端拨向第二连接部8701的拨动组件225和用于阻止第一扭簧的b端复位的第一抵挡组件224,所述拨动组件225安装在第一机架20上并位于三维驱动组件222一侧,所述第一抵挡组件224安装在三维驱动组件222上。
126.这里值得说明的是,三维驱动组件222是指其移动端能够进行上下、左右和前后三个维度的移动,并且三维驱动组件222为常规现有技术,这里不再详述。
127.在本发明实施例中,所述第二夹持组件223包括安装在三维驱动组件222上的第二夹持驱动件2230和两个第二夹持件2231,所述第二夹持件2231上设有第二夹持部22310和
第三夹持部22311,所述连接块870上设有第一夹持孔8704和第二夹持孔8705,所述第一夹持孔8704和第二夹持孔8705分别位于第一连接部8700和第三连接部8702上,当所述第二夹持驱动件2230驱动两个第二夹持件2231相互靠近时,两个第二夹持件2231上的第二夹持部22310分别从第一夹持孔8704的两端伸入第一夹持孔8704内,以及两个第二夹持件2231上的第三夹持部22311分别从第二夹持孔8705的两端伸入第二夹持孔8705内,从而将扭簧组件87夹持。
128.这样,通过对连接块870上不同位置的夹持,从而实现第一夹送机构221与第二夹持组件223之间的交接。
129.进一步优选,所述第二夹持件2231上还设有第二凹槽22312,所述第二凹槽22312为圆弧槽,当所述两个第二夹持件2231将扭簧组件87夹持时,两个第二凹槽22312分别位于连接块870上第一通孔8703的左右两侧,进而方便第五机械手342上的两个第一夹持件移动;以及方便后续过程中连接杆86穿过连接块870上的第一通孔8703。
130.在本发明实施例中,所述拨动组件225包括第一移动驱动件2251和第二支架2252,所述第二支架2252上安装有第一转动驱动件2253、第三转动座2254和拨动件2255,所述第三转动座2254同轴安装在第一转动驱动件2253的伸出轴上,所述拨动件2255偏心安装在第三转动座2254上,所述第一移动驱动件2251通过驱动第二支架2252在前后方向上往复移动进而使得拨动件2255能够移动至扭簧组件87上方,所述第一转动驱动件2253通过驱动第三转动座2254转动使得拨动件2255能够将第一扭簧的b端拨向第一连接部8700。
131.在本发明实施例中,所述拨动件2255上还设有拨动缺口22550,所述拨动缺口22550的宽度小于第一扭簧的宽度,所述第一抵挡组件224包括安装在第二移动驱动件2242和第一抵挡件2243,所述第一抵挡件2243位于两个第二夹持件2231之间,所述第二移动驱动件2242用于驱动第一抵挡件2243往远离或靠近扭簧组件87的方向作直线往复运动,其中,当所述拨动件2255将第一扭簧的b端拨向至第一连接部8700时,所述第二移动驱动件2242驱动第一抵挡件2243伸入所述拨动缺口22550内,并能够阻止第一扭簧的b端复位。
132.这样,通过拨动组件225和第一抵挡组件224的共同配合,可以避免扭簧组件87在待装配托盘内移动时,第一扭簧的b端与待装配托盘发生刮擦,以及避免第一扭簧的b端由于碰触到待装配托盘发生断裂的情况。
133.进一步优选,所述第一抵挡件2243还包括一用于抵住第一扭簧的b端的抵挡部,所述抵挡部位于第一抵挡件2243的外端,所述抵挡部的长度大于第一圆孔800轴心线和第二圆孔802轴心线之间的间距,所述抵挡部的上端面不超过连接块870第一通孔8703的圆心;如此设置,是为了在将扭簧组件87顺利送进待装配托盘内并使得连接块870的第一通孔8703与第二圆孔802同轴分布的过程中,避免第一抵挡件2243与调节杆83以及拨片85发生碰撞。
134.在本发明实施例中,如图3和图4所示,所述第一装配工位26上设有第一托架261,所述第一托架261以能够上下移动的方式安装在第一装配工位26上,所述第一弹簧263套设在第一托架261上并能够对第一托架261提供向上的作用力,所述第一托架261的顶端设有第一托槽262,当所述待装配托盘通过所述定位孔和第一定位柱的配合安装在第一装配工位26上时,所述第一托槽262能够托住调节杆83并使得调节杆83位于第一长孔801的顶端;如此设置,是考虑到待装配托盘有可能存在调节杆83脱离第一圆孔800的情况,进而导致调
节杆83落入第一长孔801的底端以及活动座81上的第三圆孔810和底盘80上的第二圆孔802不同轴分布,因此通过第一托架261能够保证调节杆83位于第一长孔801的顶端,从而既能够使得调节杆83的另一端能够对准第一圆孔800,以方便后续能够推动调节杆83的另一端穿过第一圆孔800进而使得拨片85与活动座81的侧壁相抵;同时还能够抬升活动座81,使得活动座81上的第三圆孔810与底盘80上的第二圆孔802同轴分布。
135.还设有安装在第一机架20上的第一顶紧组件,所述第一顶紧组件位于第一装配工位26的后方,所述第一顶紧组件包括第三移动驱动件和第一顶紧件,当所述待装配托盘通过所述定位孔和第一定位柱的配合安装在第一装配工位26上时,所述第三移动驱动件驱动第一顶紧件向前移动进而推动调节杆83,直至拨片85与活动座81的侧壁相抵。
136.在本技术实施例中,如图10所示,所述螺纹杆组装装置35包括第二振动送料机构350,以及安装在第一机架20上的第二组装机构,所述第二组装机构位于第三装配工位31的一侧,所述第四机械手212位于第三装配工位31的上方,所述第二振动送料机构350用于提供螺纹杆880;
137.所述第三装配工位31包括第一装配板311、第二转动驱动件和第一转动轴313,所述第一装配板311通过第一转动轴313转动安装在第一机架20上,所述第二转动驱动件驱动第一装配板311转动并使得第一装配板311具有水平的第一停留位置和倾斜的第二停留位置;
138.当第一装配板311位于倾斜的第二停留位置时,待装配托盘中的活动座81上的第四圆孔811竖直;第二组装机构能够将送料部件上的螺纹杆880送至第一装配板311的下方,再以从下往上的方式穿过所述第四圆孔811;所述第四机械手212能够对螺纹杆880中位于第四圆孔811上方的部分进行夹持。
139.进一步优选,所述第二组装机构包括第四夹持组件、第一直线移动驱动件352和第二直线移动驱动件353,所述第一直线移动驱动件352竖直安装在第一机架20上,所述第二直线移动驱动件353水平安装在第一直线移动驱动件352的活动端,所述第四夹持组件安装在第二直线移动驱动件353的活动端;
140.所述第四夹持组件包括第四夹持驱动件和两个第四夹持件3510;所述第四夹持驱动件驱动两个第四夹持件3510相互靠近或远离进而将螺纹杆880夹持或松开。
141.其中,所述第二组装机构还包括第八转动驱动件354和第九转动驱动件355,所述第八转动驱动件354安装在第一直线移动驱动件352的活动端,所述第二直线移动驱动件353水平安装在第八转动驱动件354上,所述第九转动驱动件355安装在第二直线移动驱动件353的活动端,所述第四夹持组件安装在第九转动驱动件355上。
142.在本技术实施例中,如图8所示,所述第二托盘输送机构33包括第四驱动组件、形成闭环的滑轨件331和若干个用于放置待装配托盘的第四装配板320,所述若干个第四装配板320中的部分或全部分别分布在第一进料工位301、第四装配工位302、第五装配工位303、第六装配工位304、第七装配工位305和第一出料工位306上,所述第四驱动组件驱动若干个第四装配板320沿滑轨件331移动以使得所有的第四装配板320依次在第一进料工位301、第四装配工位302、第五装配工位303、第六装配工位304、第七装配工位305和第一出料工位306之间流转。
143.在本技术实施例中,所述第四驱动组件可以通过链条、同步带或钢丝绳来驱动若
干第四装配板320在滑轨件331上滑动;进一步优选,所述第四驱动组件包括第四驱动电机、主动齿轮3302、被动齿轮3303和链条3304;所述链条3304为封闭式链条3304并与主动齿轮3302传动连接,以及与被动齿轮3303传动连接;所述主动齿轮3302和被动齿轮3303安装在第二机架30上并分别位于滑轨件331内的前后两端,从而将链条3304撑开,所述第四装配板320与链条3304连接,所述第四驱动电机通过驱动链条3304移动从而带动所有的第四装配板320沿滑轨件331移动。
144.进一步优选,所述滑轨件331的内侧壁上设有一形成闭环的第一轨道,所述滑轨件331的外侧壁上设有一形成闭环的第二轨道3316;
145.如图9所示,所述第四装配板320上安装有两个滚轮324,所述两个滚轮324分别位于滑轨件331的内外侧,其中一个滚轮324用于在第一轨道内滚动,另一个滚轮324用于在第二轨道3316内滚动。
146.在本技术实施例中,所述第二机架30上还设有两个定位组件,所述两个定位组件分别位于滑轨件331的两侧,所述定位组件包括安装在第二机架30上的至少一个第三转动驱动件3325和至少两个第六支架3321,以及转动安装在第六支架3321上的至少一根第二转动轴3322,以及固定安装在第二转动轴3322上的若干个第一定位件3323;
147.所述第四装配板320上设有一定位槽323;
148.所述第三转动驱动件3325驱动第二转动轴3322转动以使得若干第一定位件3323能够分别与位于同一侧的若干第四装配板320上的定位槽323配合。
149.进一步优选,还设有若干套设在第二转动轴3322上的并与第二转动轴3322固定连接的连接件3324,所述第三转动驱动件3325为气缸,所述连接件3324的下端与第三转动驱动件3325的活动端铰接;
150.或者,所述第三转动驱动件3325为气缸,所述定位件的下端与第三转动驱动件3325的活动端铰接。
151.在本技术实施例中,如图9所示,所述第四装配板320上设有若干用于放置待装配托盘的第四定位柱321;
152.所述第四装配板320的上表面倾斜设置以使得待装配托盘中的活动座81上的第四圆孔811竖直;
153.所述第四装配板320的上表面还固定安装或一体成型有一用于顶住待装配托盘中螺纹杆880的第四安装座322;所述第四安装座322的上表面水平,所述第四安装座322的上表面上设有一与螺纹孔帽端形状相适配的安装孔;当待装配托盘位于第四装配板320上时,所述螺纹杆880的帽端位于所述安装孔内。这样,可以保证螺纹杆880大致处于竖直状态。
154.在本技术实施例中,如图11所示,所述塑料套组装装置36包括第二振动盘360、第二送料轨道、第三移送机构362和第三组装机构363,所述第三移送机构362和第三组装机构363安装在第二机架30上,所述第三组装机构363位于滑轨件331内侧;所述第二振动盘360和第二送料轨道位于第二机架30一侧,所述第二振动盘360用于将塑料套882以第一底部壁朝下的状态送至第二送料轨道上;
155.所述第三组装机构363包括第二副机架3632以及第二副机架3632上的第二对准组件3631,所述第二对准组件3631用于使得待装配托盘中的螺纹杆880竖直;所述第三移送机构362将位于第二振动轨道出料口的塑料套882移送至第二对准组件3631上,并使得塑料套
882空套在螺纹杆880上;所述第二对准组件3631松开螺纹杆880并使得塑料套882下落至待装配托盘上从而完成对塑料套882的组装。
156.所述第二对准组件3631包括第二对准驱动件和两个第二对准件,所述第二对准驱动件驱动两个第二对准件在转动过程中相互靠近或远离以将螺纹杆880夹持或松开。
157.进一步优选,两个第二对准件的相对的侧面上设有一竖直的半圆槽,当第二对准驱动件驱动两个第二对准件相互靠近时,所述两个半圆槽配合形成一用于使得螺纹杆880竖直的圆孔。
158.在本技术实施例中,还设有第三对准组件3633,所述第三对准组件3633位于第二对准组件3631的上方;
159.其中,当塑料套882位于第二对准组件3631上时,所述第三对准组件3633用于使得塑料套882竖直。
160.进一步优选,所述第三对准组件3633包括第三对准驱动件和两个第三对准件,所述第三对准驱动件驱动两个第三对准件在转动过程中相互靠近或远离以将塑料套882夹持或松开。
161.在本技术实施例中,所述第三移送机构362包括二维第二驱动组件3621,以及安装在二维第二驱动组件3621上的第一移送组件3622,所述移送组件包括移送驱动件和至少两个移送件,所述二维第二驱动组件3621驱动所述至少两个移送件伸入塑料套882内,所述移送驱动件驱动所述至少两个移送件相互远离以将塑料套882拾起,以及驱动所述至少两个移动件相互靠近以将塑料套882松开;所述二维第二驱动组件3621驱动第一移送组件3622移动以将位于第二振动轨道出料口的塑料套882移送至第二对准组件3631上。
162.进一步优选,两个移送件相对的面上均设有一凹槽,当两个移送件相互靠近时,两个凹槽配合形成一能够容纳螺纹杆880的通道。
163.在本技术实施例中,如图12和图13所示,所述弹簧组件组装装置37包括安装在第二机架30上的第六组装机构372和第三夹送机构371,以及安装在第三机架370上的第四夹送机构376和第一输送轨道3760,以及位于第三机架370一侧的压簧送料机构373、成型垫片送料机构374和平垫片送料机构375;
164.所述第一输送轨道3760上依次设有第一工位、第二工位、第三工位和第四工位,所述第四夹送机构376包括位于机架上的第一输送轨道3760、三个第七夹持组件3761和用于驱动三个第七夹持组件3761移动的第二驱动件3762,所述压簧送料机构373将压簧881竖放在第一工位上,所述成型垫片送料机构374于第二工位处将成型垫片885平放压簧881上,所述平垫片送料机构375于第三工位处将平垫片886平放在压簧881以及成型垫片885上从而形成弹簧组件;
165.所述三个第七夹持组件3761分别将位于第一工位上的压簧881、第二工位上的压簧881和成型垫片885、第三工位上的弹簧组件夹持后,由所述第二驱动件3762驱动三个第七夹持组件3761移动,并将位于第一工位上的压簧881、第二工位上的压簧881和成型垫片885、第三工位上的弹簧组件分别送至第二工位、第三工位、第四工位;
166.所述第六组装机构372位于滑轨件331内侧,所述第六组装机构372用于使得待装配托盘上的螺纹杆880竖直,以及使得待装配托盘上的塑料套882竖直,进而使得第三夹送机构371能够将位于第四工位上的弹簧组件夹送到待装配托盘上,并使得弹簧组件位于塑
料套882内,并套在螺纹杆880上。
167.在本技术实施例中,如图12所示,所述第三夹送机构371包括二维第三驱动组件3710、第一旋转驱动件3711和第十夹持组件3712,所述二维第三驱动组件3710安装在第二机架30上,所述第一旋转驱动件3711安装在二维第三驱动组件3710的底端并能够驱动第十夹持组件3712转动;当第十夹持组件3712将弹簧组件夹持后,所述二维第三驱动组件3710驱动第十夹持组件3712左右移动以及上下移动从而将弹簧组件组装在待装配托盘上,并与螺纹杆880和塑料套882同轴分布。
168.在本技术实施例中,所述第六组装机构372同样包括第二对准组件3631和第三对准组件3633,但与第三组装机构363不同之处在于,所述第二对准组件3631位于第三对准组件3633的上方。
169.在本技术实施例中,所述润滑脂添加装置39位于弹簧组件组装装置37和塑料盖装配装置38之间。
170.在本技术实施例中,如图14、15和16所示,所述塑料盖装配装置38包括两个位于第二机架30两侧的用于将开口朝下的塑料盖883送出的第五送料机构,以及安装在第二机架30上的第一驱动机构380、第四组装机构382和两个装配机械手381,所述第四组装机构382使得待装配托盘中的螺纹杆880竖直;
171.所述第一驱动机构380驱动两个装配机械手381移动:其中一个装配机械手381将一侧的第五送料机构上的塑料盖883装配在第七装配工位305处的待装配托盘上,另一个装配机械手381将另一侧的第五送料机构上的塑料盖883装配在第七装配工位305处的另一个待装配托盘上。
172.如此设置,是因为在调节机构88的装配过程中,塑料盖883需要通过转动调节螺母以与螺纹杆880螺纹配合,耗时远远大于螺纹杆880、塑料套882和弹簧组件的组装,因此通过设置两个装配机械手381从而节约装配机械手381抓料以及进料的时间,从而提高整个调节机构88的装配效率。
173.进一步优选,所述第一驱动机构380包括第五驱动电机3801和第五副机架3803,所述第五驱动电机3801安装在第五副机架3803上,所述第五副机架3803上设有第五滑轨3804和第五滑板,所述第五滑板与第五滑轨3804滑动配合,两个装配机械手381均与所述第五滑板固定连接;所述第一驱动机构380驱动第五滑板移动并使得第五滑板具有第一停留位置和第二停留位置,当滑板位于第一停留位置时,两个装配机械手381中的左装配机械手381将第五送料机构上的塑料盖883抓取,两个装配机械手381中的右装配机械手381通过调节螺母和螺纹杆880螺纹配合从而将塑料盖883装配在待装配托盘上;当滑板位于第二停留位置时,右装配机械手381将另一个第五送料机构上的塑料盖883抓取,左装配机械手381通过调节螺母和螺纹杆880螺纹配合从而将塑料盖883装配在另一个待装配托盘上。
174.在本技术实施例中,如图16所示,所述装配机械手381包括基座3811、第四对准杆3814、升降驱动组件、旋转驱动组件和用于夹持塑料盖883的第十一夹持组件3813,所述基座3811安装在第一驱动机构380上,所述旋转驱动组件安装在所述基座3811上,所述第十一夹持组件3813安装在旋转驱动组件上,所述第四对准杆3814以能够轴向移动的方式安装在第十一夹持组件3813或旋转驱动组件上。
175.进一步优选,所述旋转驱动组件包括旋转电机38151、第三转动轴38152和套筒
38153,所述旋转电机38151固定安装在基座3811上,所述第三转动轴38152的一端通过联轴器38156与旋转电机38151的输出轴相连,所述套筒38153套在第三转动轴38152的另一端并能够沿第三转动轴38152轴向移动,所述套筒38153与第三转动轴38152之间周向固定,所述第十一夹持组件3813与套筒38153固定连接。如此设置,是因为在调节螺母与螺纹杆880螺纹配合的过程中,塑料盖883还存在着上下方向上的位移,因此,通过套筒38153与第三转动轴38152之间的配合能够补偿塑料盖883的上下移动。
176.进一步优选,还设有套设在第三转动轴38152上的旋转头38154和第一弹簧件38155,所述旋转头38154与基座3811固定连接,所述第一弹簧件38155的两端分别与旋转头38154和套筒38153固定连接。
177.进一步优选,所述第三转动轴38152上设有至少一轴向延伸的滑槽,所述套筒38153的内侧壁上设有至少一限位件,所述限位件与所述滑槽滑动配合。
178.在本技术实施例中,还设有一弹性缓冲件,所述弹性缓冲件安装在第四对准杆3814与第三转动轴38152之间进而避免第四对准杆3814与螺纹杆880之间刚性接触;同时,还能够补偿在塑料盖883装配过程中的位移差。当然,在其他实施例中,所述弹性缓冲件还能够安装在第四对准杆3814和第十一夹持组价之间;
179.在本技术实施例中,所述升降驱动组件包括升降电机38121、第一丝杆、第一传动块和若干导向柱38122,所述基座3811通过若干导向柱38122以上下升降的方式安装在第一驱动机构380中的移动板3802上,所述第一传动块与基座3811固定连接,并与第一丝杆传动配合,所述升降电机38121驱动第一丝杆转动从而使得基座3811上下升降。
180.在本技术实施例中,所述第十一夹持组件3813包括第十一夹持驱动件38131和至少两个呈圆周均匀分布的第十一夹持件38132,所述第十一夹持驱动件38131驱动所述至少两个第十一夹持件38132相互靠近或远离从而将塑料盖883夹持或松开。
181.在本技术实施例中,如图18所示,所述自动压铆机构4包括安装在主机架上的第二压铆电机41、第二压铆动力头、第二转盘44和第二旋转电机38151,所述第二转盘44上依次设有用于第二进料工位47、压铆工位48和第二出料工位49,所述第二进料工位47、压铆工位48和第二出料工位49中均设有第五装配板46,所述第二压铆电机41驱动第二压铆动力头转动从而于压铆工位48处对螺纹杆880的轴端进行压铆,所述第二旋转电机38151驱动第二转盘44转动,以使得第二转盘44上的若干第五装配板46在第二进料工位47、压铆工位48和第二出料工位49之间流转;
182.其中,如图23所示,所述第三托盘输送机构34包括固定安装在主机架上的第七副机架341,以及安装在第七副机架341上的第五机械手342和第七驱动电机343,所述第七副机架341上设有第七滑轨3410,所述第七驱动电机343驱动第五机械手342沿第七滑轨3410移动以使得第五机械手342将待装配托盘从第一出料工位306送至第二进料工位47上。
183.在本技术实施例中,如图19所示,所述自动对位机构5包括第七移动驱动件511、第五安装座512、对位驱动件513和两根对位杆514,所述第五安装座512安装在第七移动驱动件511的移动端上,所述对位驱动件513与第五安装座512固定连接,所述第七移动驱动件511驱动第五安装座512移动以使得两根对位杆514能够伸入第八装配工位93上的待装配托盘内,所述对准驱动件驱动两根对位杆514相互靠近以促使扭簧组件87移动至连接杆86的中间位置。
184.这里值得说明的是,第八装配工位93的结构与第三装配工位31的结构相同,其中,当两根对位杆514伸入第八装配工位93上的待装配托盘内时,待装配托盘水平放置。
185.在本技术实施例中,如图20所示,所述自动铰孔机构6包括安装在主机架上的第三转盘61、清扫组件62、铰孔组件和第五转动电机63,所述第三转盘61上依次设有第三进料工位611、铰孔工位612、第三出料工位613和清扫工位614,所述第三进料工位611、铰孔工位612、第三出料工位613和清扫工位614中均设有一放置待装配托盘的第七装配板64,所述铰孔组件于铰孔工位612处对待装配托盘中的锥形管82进行铰孔作业;所述清扫组件62于清扫工位614处对第七装配板64进行清扫,所述第五转动电机63驱动第三转盘61转动,以使得第三转盘61上的若干第五装配板46在第三进料工位611、铰孔工位612、第三出料工位613和清扫工位614之间流转;
186.其中,如图24所示,所述第四托盘输送机构91包括固定安装在主机架上的第八副机架910,以及安装在第八副机架910上的第六机械手911、第七机械手912和第八驱动电机913,所述第八副机架910上设有第八滑轨9100,所述第八驱动电机913驱动第六机械手911和第七机械手912沿第八滑轨9100移动,以使得第六机械手911将待装配托盘从第二出料工位49送至自动对位机构5上;以及使得第七机械手912将待装配托盘从自动对位机构5送至第三进料工位611上。
187.在本技术实施例中,如图27所示,所述把手件84包括一体成型的把手底部壁841和把手侧部壁842,所述把手侧部壁842上设有与调节杆83的把手端过盈配合的把手安装孔843;
188.如图21所示,所述调节杆83包括一体弯折成型的第一杆部831和第二杆部832,所述第一杆部831安装在待装配托盘上,所述调节杆83的把手端位于第二杆部832的外端。
189.在本技术实施例中,如图21所示,所述把手装配装置7包括第六送料机构71和第八装配机构72,所述第八装配机构72包括第八移动驱动件720、第八承接件721、第二抵挡件723、第五对准驱动件724和两个第五对准件725,所述第八承接件721滑动安装在第五机架上,所述第二抵挡件723和第八承接件721分别位于调节杆83相对的两侧,所述第二抵挡件723用于抵住第一杆部831,所述第五对准驱动件724驱动两个第五对准件725相互靠近或远离从而将第二杆部832夹持或松开,并在将第二杆部832夹持时能够使得调节杆83的把手端朝向第八承接件721,所述第八承接件721用于承接第六送料机构71所输送的把手件84并能够使得把手件84上的把手安装孔843对准调节杆83的把手端,所述第八移动驱动件720驱动第八承接件721往复移动并能够使得把手件84套设在调节杆83的把手端上;如此设置,是因为把手件84主要是通过把手安装孔843和调节杆83的把手端过盈配合,从而安装在调节杆83上,即对于安装孔和调节杆83的把手端之间的配合精度要求是非常高的,因此,通过第五对准组件3821确保调节杆83的位置精度,以及通过定位凹槽7211与把手件84配合从而确保把手件84的位置精度。
190.作为优选,还设有第二抵挡驱动件,所述第二抵挡件723滑动安装在第五机架上,所述第二抵挡驱动件驱动第二抵挡件723在往复移动并能够抵住第一杆部831。
191.作为优选,所述第八承接件721上设有用于承接把手件84的定位凹槽7211,所述定位凹槽7211的一侧开口以使得把手件84能够套设在调节杆83的把手端上,所述定位凹槽7211的侧部壁与把手件84的把手侧部壁842配合以使得把手安装孔843朝向调节杆83的把
手端。
192.作为优选,还设有安装在第五机架上的顶出组件,所述顶出组件包括顶出驱动件和第一顶出杆,所述定位凹槽7211的底部壁上设有一第二通孔7212,所述第一顶出驱动件用于驱动第一顶出杆沿所述第二通孔7212上下移动以将把手件84顶出定位凹槽7211;如此设置,是因为在第八承接件721在推动把手件84套设在调节杆83的把手端上时,由于推力较大会使得把手件84卡在定位凹槽7211内,考虑到把手件84的位置关系,仅仅通过托盘输送机构对于座椅托盘8的夹持力是不足以让把手件84从定位凹槽7211上脱离的,反而会造成座椅托盘8从托盘输送机构上脱落,因此,通过设置第一顶出杆来将把手件84顶出。
193.如图25所示,所述第五托盘输送机构92包括固定安装在第四机架90上的第九副机架920,以及安装在第九副机架920上的第八机械手921、第九机械手922和第九驱动电机923,所述第九副机架920上设有第九滑轨9200,所述第九驱动电机923驱动第八机械手921和第九机械手922沿第九滑轨9200移动,以使得第八机械手921将待装配托盘从自动铰孔机构6送至把手装配装置7上;以及使得第九机械手922将待装配托盘从把手装配装置7送至第二输送线11上。
194.这里值得说明的是,第五机械手342、第六机械手911、第七机械手912、第八机械手921和第九机械手922与第一机械手211结构相同;这里不再详述。
195.在本技术实施例中,所述第二输送线11通过传送带、滚筒或倾斜的输送轨道完成对座椅托盘8的输送。
196.一种座椅托盘8的自动装配方法;其具体步骤如下:
197.s1:所述锁定机构装配装置22于第一装配工位26处将扭簧组件87和连接杆86组装在待装配托盘上;
198.s2:所述锁定机构装配装置22于第二装配工位27处将扭簧组件87和连接杆86装配在待装配托盘上;
199.s3:所述螺纹杆组装装置35于第三装配工位31处将螺纹杆880组装至待装配托盘上;
200.s4:所述塑料套组装装置36于第四装配工位302处将塑料套882空套在螺纹杆880上;
201.s5:所述弹簧组件组装装置37于第五装配工位303处将压簧881、成型垫片885和平垫片886套在螺纹杆880上;
202.s6:所述塑料盖装配装置38于第七装配工位305处将塑料盖883中的调节螺母与螺纹杆880螺纹配合;
203.s7:所述把手装配装置7于第九装配工位94处将把手件84套设在调节杆83上。
204.进一步优选,s1中将连接杆86组装在待装配托盘上的具体步骤如下:
205.步骤一:第一送料机构230将连接杆86平放在位于第一停留位置处的第一承接件2420上;
206.步骤二:第四移动驱动件2431驱动第一对准杆2430依次穿过底盘80一侧的第二圆孔802、活动座81一侧的第三圆孔810、扭簧组件87上的第一通孔8703、活动座81另一侧的第三圆孔810和底盘80另一侧的第二圆孔802后与连接杆86插接,并使得连接杆86的帽端移动至第一推动件2410上;
207.步骤三:第一承接驱动件2421驱动第一承接件2420移动至第二停留位置;
208.步骤四:第五移动驱动件2411驱动第一推动件2410推动连接杆86向第一装配工位26移动;并使得连接杆86依次穿过底盘80一侧的第二圆孔802、活动座81一侧的第三圆孔810、扭簧组件87上的第一通孔8703、活动座81另一侧的第三圆孔810和底盘80另一侧的第二圆孔802,进而将连接杆86组装到待装配托盘上。
209.进一步优选,s1中将扭簧组件87组装在待装配托盘上的具体步骤如下:
210.步骤一:第一夹送机构221将扭簧组件87夹送到第二夹持组件223上,并使得第一连接部8700朝向第一装配工位26;
211.步骤二:通过拨动件2255将第一扭簧的b端拨向至第二连接部8701,第一抵挡件2243移动至第一扭簧的上方以阻止第一扭簧的b端复位,然后拨动件2255再返回至初始位置;
212.步骤三:所述三维驱动组件222驱动扭簧组件87往第一装配工位26的方向移动,并将扭簧组件87送至待装配托盘内的安装位置;
213.步骤四:第五移动驱动件2411驱动第一推动件2410推动连接杆86向第一装配工位26移动;并使得连接杆86依次穿过底盘80一侧的第二圆孔802、活动座81一侧的第三圆孔810、扭簧组件87上的第一通孔8703、活动座81另一侧的第三圆孔810和底盘80另一侧的第二圆孔802,进而将扭簧组件87组装到待装配托盘上。
214.进一步优选,s2中将扭簧组件87和连接杆86装配在待装配托盘上的具体过程如下:
215.所述第六移动驱动件252驱动第二顶紧件253向第二装配工位27移动以将连接杆86的帽端顶紧,以及所述第一压铆电机250驱动第一旋动力头251对连接杆86的轴端进行压铆。
216.进一步优选,s3中将螺纹杆880组装至待装配托盘上的具体过程如下:
217.当第一装配板311处于第二停留位置时,第二组装机构将螺纹杆880送至第一装配板311的下方,再以从下往上的方式穿过所述第四圆孔811。
218.进一步优选,s4中将塑料套882空套在螺纹杆880上的具体步骤如下:
219.步骤一、第二对准驱动件驱动两个第二对准件相互靠近以使得待装配托盘中的螺纹杆880竖直;
220.步骤二、塑料套882送料机构将开口向下的塑料套882送至两个第二对准件上,并使得塑料套882空套在螺纹杆880上;
221.步骤三、第三对准驱动件驱动两个第三对准件相互靠近以使得塑料套882竖直;
222.步骤四、第二对准驱动件驱动两个第二对准件相互远离以松开螺纹杆880,然后第三对准驱动件驱动两个第三对准件相互远离以松开塑料套882,从而使得塑料套882落在待装配托盘上从而完成组装。
223.进一步优选,s5中将压簧881、成型垫片885和平垫片886套在螺纹杆880上的具体步骤如下:
224.步骤一、压簧881送料机构373将压簧881竖放在第一工位上,成型垫片885送料机构374于第二工位处将成型垫片885平放压簧881上,平垫片886送料机构375于第三工位处将平垫片886平放在压簧881以及成型垫片885上从而形成弹簧组件;
225.步骤二、三个第七夹持组件3761分别将第一工位上的压簧881、第二工位上的压簧881和成型垫片885、第三工位上的弹簧组件夹持,第二驱动件3762驱动三个第七夹持组件3761移动从而将位于第一工位上的压簧881、第二工位上的压簧881和成型垫片885、第三工位上的弹簧组件分别送至第二工位、第三工位、第四工位;
226.步骤三、第三夹送机构371将位于第四工位上的弹簧组件套在螺纹杆880上。
227.进一步优选,s6中将塑料盖883中的调节螺母与螺纹杆880螺纹配合的具体步骤如下:
228.步骤一:第一驱动机构380驱动装配机械手381移动以将第五送料机构出料口处的开口朝下的塑料盖883抓取,然后再驱动装配机械手381移动至待装配托盘的上方;并且在该过程中,第四对准组件3821将螺纹杆880或套设在螺纹杆880上的压簧881夹持以使得螺纹杆880竖直;
229.步骤二:装配机械手381下降以使得第四对准杆3814与螺纹杆880相抵以将螺纹杆880固定,以及将塑料盖883套在螺纹杆880上;
230.步骤三:装配机械手381旋转以使得塑料盖883中的调节螺母与螺纹杆880螺纹配合,从而将塑料盖883装配在待装配托盘上。
231.进一步优选,s7中将把手件84套设在调节杆83上的具体步骤如下:
232.步骤一:第五对准驱动件724驱动两个第五对准件725相互靠近以将第二杆部832夹持,从而使得调节杆83的把手端朝向第八承接件721;以及同时第六送料机构71将把手件84放置在第八承接件721上,并使得把手件84上的把手安装孔843对准调节杆83的把手端;
233.步骤二:第八移动驱动件720驱动第八承接件721移动以使得把手件84套设在调节杆83的把手端上。
234.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
235.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在不脱离本技术的原理和宗旨的情况下在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。