1.本发明涉及发电机组装领域,尤其涉及一种具有精准定位功能的发电机定子通风槽板的组装设备。
背景技术:
2.水轮发电机定子通风槽板由定子冲片和通风槽钢两部分组成,通风槽钢通过点焊的方式与定子冲片组成整体,其作用是形成径向风道并通风冷却定子铁芯和定子线圈,现利用扇形的定子冲片和单片的通风槽钢组装成定子通风槽板。
3.现有水轮发电机通风槽板的组装还停留在人工操作的方式,而人工的操作方式是将定子冲片放置在一个平台上,随后人工利用画线法确定通风槽钢的摆放位置,接着再利用手和眼的配合将通风槽钢放置在事先画好的规整线内,然后再利用焊接的方式将定子冲片和通风槽钢组装在一起,这种操作方式效率极低,且在焊接的过程中难以保证通风槽钢位置的精准性;现有组装方式难以时刻保持定子冲片与通风槽钢的紧密性,使得通风槽钢与原设计的位置发生误差,导致发电机的散热效果不佳。
4.针对上述问题,现提出一种具有精准定位功能的发电机定子通风槽板的组装设备。
技术实现要素:
5.为了克服现有组装方式停留在人工操作,难以快速实现通风槽钢的精准定位,且无法在组装过程中保持定子冲片与通风槽钢的紧密贴合的缺点,本发明提供一种具有精准定位功能的发电机定子通风槽板的组装设备。
6.技术方案:一种具有精准定位功能的发电机定子通风槽板的组装设备,包括有机架、安装板、第一龙门架、第二龙门架、精准装夹系统和定位上料系统,机架上表面后侧固接有安装板,机架上表面前侧固接有第一龙门架,机架上表面中部固接有第二龙门架,第一龙门架和第二龙门架之间连接有用于卡紧定子冲片并实现定位旋转的精准装夹系统,安装板前部连接有用于供应通风槽钢并实现精准贴和卡紧的定位上料系统,精准装夹系统包括有伺服电机、连接器、定位板、弧形电动滑轨、第三电动滑块、顶架、固定块、第二弹簧伸缩杆和装夹机构,第二龙门架上部后侧固接有伺服电机,第二龙门架上部前侧转动连接有一个连接器,第一龙门架后侧转动连接有一个连接器,伺服电机输出轴固接后方的连接器,两个连接器固接有定位板,定位板上表面左部和右部各固接有一个弧形电动滑轨,两个弧形电动滑轨上各滑动连接有一个第三电动滑块,每个第三电动滑块的前部和后部各固接有一个顶架,定位板左部和右部各固接有两个固定块,每个固定块上部固接有一个第二弹簧伸缩杆,每个第二弹簧伸缩杆伸缩部固接有一个装夹机构,装夹机构包括有定位卡板、第二直条弹簧和盖板,每个第二弹簧伸缩杆伸缩部固接有一个定位卡板,每个定位卡板上部固接有两个第二直条弹簧,两个第二直条弹簧各固接有一个盖板,两个盖板均与定位卡板进行滑动连接。
7.优选的技术方案,定位板上开有多个定位矩形长条孔,且每个矩形长条孔内开有三个柱形孔。
8.优选的技术方案,同一侧的两个顶架上的四个顶杆端部处于定位板的同一径向。
9.优选的技术方案,定位上料系统包括有第一电动滑轨、第一电动滑块、第一固定架、第一转动电机、转盘、支撑架、第一电动推杆、第二固定架、装载箱、第二电动推杆、第一推挤板、第一弹簧伸缩杆、顶板、第三电动推杆、第二推挤板、楔形板、防偏机构、漏板、第二转动电机、第一合紧机构、第一平齿轮、第二平齿轮和第二合紧机构,安装板前部固接有第一电动滑轨,第一电动滑轨上滑动连接有第一电动滑块,第一电动滑块前部固接有第一固定架,第一固定架右部固接有第一转动电机,第一转动电机输出轴固接有转盘,转盘上表面固接有支撑架,支撑架左部固接有第一电动推杆,第一电动推杆伸缩部固接有第二固定架,第二固定架左部固接有装载箱,装载箱内部后侧固接有第二电动推杆,第二电动推杆伸缩部固接有第一推挤板,装载箱内部前侧固接有两个第一弹簧伸缩杆,两个第一弹簧伸缩杆各固接有一个顶板,装载箱左部前侧和右部前侧各固接有一个第三电动推杆,两个第三电动推杆伸缩部各固接有一个第二推挤板,第二推挤板底部左侧和右侧各固接有一个楔形板,装载箱左部前侧和右部前侧各固接有一个防偏机构,且两个防偏机构分别位于两个第三电动推杆后方,装载箱底部前侧固接有漏板,漏板左部固接有第二转动电机,漏板前部转动连接有第一合紧机构,第二转动电机输出轴固接第一合紧机构,第一合紧机构左部固接有第一平齿轮,漏板后部转动连接有第二合紧机构,第二合紧机构左部固接有第二平齿轮,第一平齿轮与第二平齿轮相啮合。
10.优选的技术方案,第一合紧机构和第二合紧机构上均由圆杆和四个橡胶夹紧板组成。
11.优选的技术方案,防偏机构包括有扭转式卡架、第一直滑轨、第一直条弹簧、双向楔形块、第二直滑轨和第三推挤板,装载箱上表面前部转动连接有两个对称的扭转式卡架,装载箱左部前侧和右部前侧各固接有一个第一直滑轨,两个第一直滑轨内部各固接有一个第一直条弹簧,两个第一直条弹簧各固接有一个双向楔形块,两个双向楔形块分别与对应的第一直滑轨滑动连接,两个第一直滑轨上部后侧各固接有一个第二直滑轨,两个第二直滑轨分别固接装载箱,两个第二直滑轨内各滑动连接有一个第三推挤板。
12.优选的技术方案,两个扭转式卡架均为双l形限位架,且后方的l形限位架上固接有配重块。
13.优选的技术方案,还包括有焊接系统,装载箱底部前侧连接有两个焊接系统,且两个固接系统位于漏板的前方和后方,焊接系统包括有第二电动滑轨、第二电动滑块、支撑板、第四电动推杆、罩壳、第一电焊夹板、第五电动推杆、第二电焊夹板和焊条,装载箱底部前侧固接有两个第二电动滑轨,且两个第二电动滑轨位于漏板的前方和后方,两个第二电动滑轨上各滑动连接有一个第二电动滑块,两个第二电动滑块上各固接有一个支撑板,两个支撑板上各固接有一个第四电动推杆,两个第四电动推杆伸缩部各固接有一个罩壳,两个罩壳内各固接有一个第一电焊夹板,两个罩壳外表面各固接有一个第五电动推杆,两个第五电动推杆伸缩部各固接有一个第二电焊夹板,第一电焊夹板和第二电焊夹板之间夹有可拆卸的焊条。
14.优选的技术方案,还包括有支撑限位系统,机架上连接有支撑限位系统,且支撑限
位系统位于第一龙门架和第二龙门架之间,机架前部固接有四个多节式电动推杆,四个多节式电动推杆伸缩部固接有支撑台,支撑台上表面固接有垫板。
15.本发明的有益效果为:本发明摒弃人工的组装方式,利用定位板的设计将定子冲片进行支撑装夹,对扇形定子冲片的四角进行支顶,利用定位上料系统对定子冲片上所使用的通风槽钢进行预摆放,且一次释放一块通风槽钢,维持剩余通风槽钢的稳定输送,同时定位上料系统的转动中心与定子冲片的圆心重合,保证了通风槽钢摆放的准确性,便于实现定子冲片与通风槽钢的紧密贴合,同时在定位板上设计了柱形焊接用定位柱孔,便于在定子冲片与通风槽钢的两侧完成焊接,上下料操作方便,且提高了通风槽板的组装效率。
附图说明
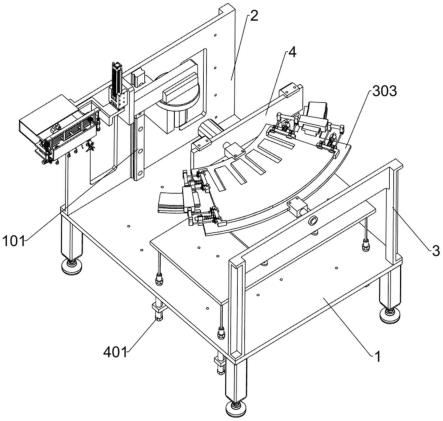
16.图1为本发明的第一种结构示意图;
17.图2为本发明的工作结构示意图;
18.图3为本发明精准装夹系统的立体结构示意图;
19.图4为本发明精准装夹系统的局部结构示意图;
20.图5为本发明装夹机构的立体结构示意图;
21.图6为本发明定位板的立体结构示意图;
22.图7为本发明定位上料系统的立体结构示意图;
23.图8为本发明定位上料系统的第一种局部结构示意图;
24.图9为本发明定位上料系统的第二种局部结构示意图;
25.图10为本发明定位上料系统的第三种局部结构示意图;
26.图11为本发明防偏机构的立体结构示意图;
27.图12为本发明防偏机构的局部结构爆炸图;
28.图13为本发明定位上料系统的第四种局部结构示意图;
29.图14为本发明焊接系统的立体结构示意图;
30.图15为本发明焊接系统的局部结构剖视图;
31.图16为本发明支撑限位系统的立体结构示意图。
32.附图中的标记:1-机架,2-安装板,3-第一龙门架,4-第二龙门架,101-第一电动滑轨,102-第一电动滑块,103-第一固定架,104-第一转动电机,105-转盘,106-支撑架,107-第一电动推杆,108-第二固定架,109-装载箱,1010-第二电动推杆,1011-第一推挤板,1012-第一弹簧伸缩杆,1013-顶板,1014-第三电动推杆,1015-第二推挤板,1016-楔形板,10171-扭转式卡架,10172-第一直滑轨,10173-第一直条弹簧,10174-双向楔形块,10175-第二直滑轨,10176-第三推挤板,1018-漏板,1019-第二转动电机,1020-第一合紧机构,1021-第一平齿轮,1022-第二平齿轮,1023-第二合紧机构,201-第二电动滑轨,202-第二电动滑块,203-支撑板,204-第四电动推杆,205-罩壳,206-第一电焊夹板,207-第五电动推杆,208-第二电焊夹板,209-焊条,301-伺服电机,302-连接器,303-定位板,304-弧形电动滑轨,305-第三电动滑块,306-顶架,307-固定块,308-第二弹簧伸缩杆,309-装夹机构,3091-定位卡板,3092-第二直条弹簧,3093-盖板,3010-定子冲片,401-多节式电动推杆,402-支撑台,403-垫板。
具体实施方式
33.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
34.实施例1
35.一种具有精准定位功能的发电机定子通风槽板的组装设备,如图1-6所示,包括有机架1、安装板2、第一龙门架3、第二龙门架4、精准装夹系统和定位上料系统;机架1上表面后侧固接有安装板2;机架1上表面前侧固接有第一龙门架3;机架1上表面中部固接有第二龙门架4;第一龙门架3和第二龙门架4之间连接有精准装夹系统;安装板2前部连接有定位上料系统。
36.精准装夹系统包括有伺服电机301、连接器302、定位板303、弧形电动滑轨304、第三电动滑块305、顶架306、固定块307、第二弹簧伸缩杆308和装夹机构309;第二龙门架4上部后侧固接有伺服电机301;第二龙门架4上部前侧转动连接有一个连接器302;第一龙门架3后侧转动连接有一个连接器302;伺服电机301输出轴固接后方的连接器302;两个连接器302固接有定位板303;定位板303上表面左部和右部各固接有一个弧形电动滑轨304;两个弧形电动滑轨304上各滑动连接有一个第三电动滑块305;每个第三电动滑块305的前部和后部各固接有一个顶架306;定位板303左部和右部各固接有两个固定块307;每个固定块307上部固接有一个第二弹簧伸缩杆308;每个第二弹簧伸缩杆308伸缩部固接有一个装夹机构309。
37.装夹机构309包括有定位卡板3091、第二直条弹簧3092和盖板3093;每个第二弹簧伸缩杆308伸缩部均固接有一个定位卡板3091;每个定位卡板3091上部固接有两个第二直条弹簧3092;两个第二直条弹簧3092各固接有一个盖板3093;两个盖板3093均与定位卡板3091进行滑动连接。
38.定位板303上开有多个定位矩形长条孔,且每个矩形长条孔内均开有三个柱形孔。
39.同一侧的两个顶架306上的四个顶杆端部处于定位板303的同一径向。
40.在使用具有精准定位功能的发电机定子通风槽板的组装设备前,以下简称组装设备,操作员将组装设备接通电源,调整定子冲片3010输送设备的高度,使得定子冲片3010精确放置在精准装夹系统;定子冲片3010越过四个定位卡板3091并向下移动,随后定子冲片3010放置在定位板303,使得扇形的定子冲片3010的圆心位置与定位板303的圆心位置重合,随后控制两个弧形电动滑轨304运行,两个弧形电动滑轨304各带动一个第三电动滑块305运行,两个第三电动滑块305相向弧形移动,同时两个第三电动滑块305各带动两个顶架306移动,每个顶架306上的顶杆分别推动一个盖板3093移动,盖板3093移动的同时卡住定子冲片3010的表面,避免定子冲片3010在翻转的过程中出现偏位和脱离,盖板3093继续移动且端部顶住定位卡板3091之后,前后相邻的两个盖板3093推动定位卡板3091移动,四个定位卡板3091同时卡住扇形定子冲片3010的四个角,实现精准卡位;接着控制伺服电机301运行,伺服电机301输出轴带动后方的连接器302转动,相应的前方的连接器302在第一龙门架3上跟随转动,因此定位板303跟随两个连接器302转动一百八十度完成换位,具有精准定位功能的发电机定子通风槽板的组装设备拥有智能控制系统,允许传动系统进行角度的转动,且定位板303上线路安装设置在允许的安装条件边缘,并不会因为进行焊接散热的问题影响线路的安全性,定位板303只需要转动半圈,在现有技术人员的系统编程中都会注意这
个问题,且设计的程序都带有返程程序;随后向定子冲片3010的底部添加支撑部件,防止定子冲片3010底部出现移位,随后控制定位上料系统运行,定位上料系统事先装有通风槽钢,随后定位上料系统将通风槽钢定位至定位板303上的矩形定位孔上方,并将夹紧的通风槽钢输送至定子冲片3010的表面,利用焊接的操作将每个通风槽钢与定子冲片3010组装在一起,同时焊接的操作是两侧三点焊接法,即每个通风槽钢与定子冲片3010存在六个焊接点,依次完成定子冲片3010上通风槽钢的组装;随后再次控制伺服电机301反向转动,在伺服电机301的运行之下,定位板303反向转动一百八十度回至初始位置,随后控制两个第三电动滑块305回程,四个第二弹簧伸缩杆308上的弹力各自将相对应的装夹机构309拉回至初始位置,随后将组装好的通风槽板拆下即可完成组装操作。
41.实施例2
42.在实施例1的基础上,如图1、图7-13所示,定位上料系统包括有第一电动滑轨101、第一电动滑块102、第一固定架103、第一转动电机104、转盘105、支撑架106、第一电动推杆107、第二固定架108、装载箱109、第二电动推杆1010、第一推挤板1011、第一弹簧伸缩杆1012、顶板1013、第三电动推杆1014、第二推挤板1015、楔形板1016、防偏机构、漏板1018、第二转动电机1019、第一合紧机构1020、第一平齿轮1021、第二平齿轮1022和第二合紧机构1023;安装板2前部螺栓连接有第一电动滑轨101;第一电动滑轨101上滑动连接有第一电动滑块102;第一电动滑块102前部固接有第一固定架103;第一固定架103右部固接有第一转动电机104;第一转动电机104输出轴固接有转盘105;转盘105上表面固接有支撑架106;支撑架106左部固接有第一电动推杆107;第一电动推杆107伸缩部固接有第二固定架108;第二固定架108左部焊接有装载箱109;装载箱109内部后侧固接有第二电动推杆1010;第二电动推杆1010伸缩部固接有第一推挤板1011;装载箱109内部前侧固接有两个第一弹簧伸缩杆1012;两个第一弹簧伸缩杆1012各固接有一个顶板1013;装载箱109左部前侧和右部前侧各固接有一个第三电动推杆1014;两个第三电动推杆1014伸缩部固接有一个第二推挤板1015;第二推挤板1015底部左侧和右侧各固接有一个楔形板1016;装载箱109左部前侧和右部前侧各固接有一个防偏机构,且两个防偏机构分别位于两个第三电动推杆1014后方;装载箱109底部前侧焊接有漏板1018;漏板1018左部固接有第二转动电机1019;漏板1018前部转动连接有第一合紧机构1020;第二转动电机1019输出轴固接第一合紧机构1020;第一合紧机构1020左部固接有第一平齿轮1021;漏板1018后部转动连接有第二合紧机构1023;第二合紧机构1023左部固接有第二平齿轮1022;第一平齿轮1021与第二平齿轮1022相啮合。
43.第一合紧机构1020和第二合紧机构1023上均由圆杆和四个橡胶夹紧板组成。
44.防偏机构包括有扭转式卡架10171、第一直滑轨10172、第一直条弹簧10173、双向楔形块10174、第二直滑轨10175和第三推挤板10176;装载箱109上表面前部转动连接有两个对称的扭转式卡架10171;装载箱109左部前侧和右部前侧各固接有一个第一直滑轨10172;两个第一直滑轨10172内部各固接有一个第一直条弹簧10173;两个第一直条弹簧10173各固接有一个双向楔形块10174;两个双向楔形块10174分别与对应的第一直滑轨10172滑动连接;两个第一直滑轨10172上部后侧各固接有一个第二直滑轨10175;两个第二直滑轨10175分别固接装载箱109;两个第二直滑轨10175内各滑动连接有一个第三推挤板10176。两个扭转式卡架10171均为双l形限位架,且后方的l形限位架上焊接有配重块。
45.控制第一电动滑轨101运行,第一电动滑轨101带动第一电动滑块102向下移动,此
时跟随第一电动滑块102向下移动的装载箱109定位至末端位置,随后工作人员将定子冲片3010上需要用到的通风槽钢放置在第一推挤板1011和两个顶板1013之间,随后控制第二电动推杆1010运行,第二电动推杆1010伸缩部带动第一推挤板1011移动,第一推挤板1011和两个顶板1013将通风槽钢夹紧,此时两个第一弹簧伸缩杆1012处于收缩的状态并提供弹力;随后控制第一电动滑轨101运行,第一电动滑轨101带动第一电动滑块102向上移动,装载箱109定位至工作的高度,随后控制第一转动电机104运行,第一转动电机104输出轴带动转盘105转动,转盘105带动支撑架106转动,支撑架106带动第一电动推杆107转动,第一电动推杆107带动第二固定架108转动,此时位于装载箱109内的第一块通风槽钢定位至定位板303左方的第一个矩形定位孔的正上方,接着控制两个第三电动推杆1014运行,两个第三电动推杆1014伸缩部带动第二推挤板1015向下移动,第二推挤板1015带动两个楔形板1016向下移动,第二推挤板1015率先将第一块通风槽钢向下推动,第一块通风槽钢还未脱离两个顶板1013,两个楔形板1016各自推动一个双向楔形块10174移动,两个双向楔形块10174各自在第一直滑轨10172内移动,同时两个双向楔形块10174各自推动一个第三推挤板10176向上移动,两个第三推挤板10176向上移动并各自推动一个扭转式卡架10171上后方的l形限位架,因此两个扭转式卡架10171开始旋转,此时前方的l形限位架卡住下一块通风槽钢,有效避免第一块通风槽钢失去两个顶板1013支撑之后剩余通风槽钢出现短暂偏移,维持设备的稳定运行,随后第一块通风槽钢落至定子冲片3010上,随后控制第二转动电机1019运行,第二转动电机1019输出轴带动第一合紧机构1020转动,第一合紧机构1020带动第一平齿轮1021传动第二平齿轮1022,随后第二平齿轮1022带动第二合紧机构1023转动,此时第一合紧机构1020和第二合紧机构1023将第一块通风槽钢卡紧,接着控制第一电动推杆107运行,第一电动推杆107伸缩部带动第二固定架108向下微移动,此时被夹紧的通风槽钢向下推挤定子冲片3010,实现紧密贴合,且通风槽钢的位置在相对位置上处于定位板303上矩形定位孔的中间位置,实现精准定位,随后利用焊接设备将通风槽钢和定子冲片3010焊接组装。
46.实施例3
47.在实施例2的基础上,如图1、图14和图15所示,还包括有焊接系统;装载箱109底部前侧连接有两个焊接系统,且两个焊接系统分别位于漏板1018的前方和后方;焊接系统包括有第二电动滑轨201、第二电动滑块202、支撑板203、第四电动推杆204、罩壳205、第一电焊夹板206、第五电动推杆207、第二电焊夹板208和焊条209;装载箱109底部前侧螺栓连接有两个第二电动滑轨201,且两个第二电动滑轨201位于漏板1018的前方和后方;两个第二电动滑轨201上各滑动连接有一个第二电动滑块202;两个第二电动滑块202上各固接有一个支撑板203;两个支撑板203上各固接有一个第四电动推杆204;两个第四电动推杆204伸缩部各固接有一个罩壳205;两个罩壳205内各固接有一个第一电焊夹板206;两个罩壳205外表面各固接有一个第五电动推杆207;两个第五电动推杆207伸缩部各固接有一个第二电焊夹板208;第一电焊夹板206和第二电焊夹板208之间夹有可拆卸的焊条209。
48.上述实施例中的焊接操作是焊接系统;通风槽钢和定子冲片3010贴合在一起之后,由于定位板303上矩形定位孔内还开有柱形孔,因此控制两个第二电动滑轨201运行,两个第二电动滑轨201各带动一个第二电动滑块202移动,两个第二电动滑轨201各带动一个支撑板203移动,此时跟随移动的两个焊条209定位至第一个柱形孔的位置,随后控制两个
第四电动推杆204运行,两个第四电动推杆204各自带动一个罩壳205斜向下移动,使得两个焊条209的端部定位至通风槽钢和定子冲片3010接触的位置,随后控制第一电焊夹板206和第二电焊夹板208接通上电,在柱形孔内完成点焊,使得通风槽钢的两端完成焊接,两个焊条209的消耗由两个第四电动推杆204进行位移补偿,且两个第五电动推杆207负责更换焊条209时打开第二电焊夹板208,便于实现焊条209的更换;完成一个位置的焊接之后,控制第二电动滑轨201运行,第二电动滑轨201将两个焊条209定位至下一个柱形孔的位置;此焊接手段在稳定了通风槽钢的基础之上实现稳定焊接,避免通风槽钢与定子冲片3010之间出现错动,且符合两侧三点焊接法,即每个通风槽钢与定子冲片3010存在六个焊接点。
49.实施例4
50.在实施例3的基础上,如图1和图16所示,还包括有支撑限位系统;机架1上连接有支撑限位系统,且支撑限位系统位于第一龙门架3和第二龙门架4之间;机架1前部固接有四个多节式电动推杆401;四个多节式电动推杆401伸缩部固接有支撑台402;支撑台402上表面固接有垫板403。
51.上述实施例中,为旋转之后的定子冲片3010下部提供支撑的是支撑限位系统;当定子冲片3010完成旋转之后,定子冲片3010底部只由盖板3093负责支撑,影响通风槽钢的焊接组装;此时控制四个多节式电动推杆401运行,四个多节式电动推杆401的伸缩部带动支撑台402向上移动,同时跟随移动的垫板403定位至定子冲片3010的下表面,实现支撑,同时支撑台402和垫板403之间的距离满足第三电动滑块305翻转之后的距离。
52.应当理解,以上的描述仅仅用于示例性目的,并不意味着限制本发明。本领域的技术人员将会理解,本发明的变型形式将包含在本文的权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。