1.本发明涉及报废汽车处理技术领域,尤其涉及一种用于报废汽车零部件无害化处理方法。
背景技术:
2.报废汽车回收拆解再利用是节约原生资源,实现环境保护、保证国家资源合理利用的重要途径,是我国经济可持续发展的重要措施之一。报废汽车的回收利用是一个涉及面广的系统工程,既需要各级政府通过完善的法规加强宏观调控,又需要市场合理配置资源。
3.中国实用新型专利公开号cn211730374u公开了一种报废汽车车身压扁装置,涉及到报废汽车领域,包括挤压箱,挤压箱的顶端固定连接有顶板,顶板的上表面固定连接有遮板,顶板的上表面两侧均固定连接有液压缸,液压缸的底部固定连接有液压杆,液压杆的底端固定连接有压板,压板的下表面固定连接有摩擦凸点。
4.由此可见,所述报废汽车车身压扁装置存在以下问题:压扁后的最终产品为一表面平坦的饼状结构,缺少有力支撑点,不利于后续粉碎辊对其进行破碎,且现有技术中,人员使用叉车通过玻璃孔将压扁后的报废汽车直接放入粉碎机上方,易出现报废汽车下降过快导致卡住粉碎辊的情况。
技术实现要素:
5.为此,本发明提供一种用于报废汽车零部件无害化处理方法,用以克服现有技术中因对报废汽车的压扁过程单一和对报废汽车在粉碎机中自主下降导致的粉碎效率低的问题。
6.为实现上述目的,本发明提供一种用于报废汽车零部件无害化处理方法,其中,包括以下步骤:步骤s1,将拆解后的报废汽车放入压扁箱;步骤s2,中控单元控制压扁单元运行以将报废汽车压扁至符合粉碎条件;步骤s3,所述中控单元控制第一传送带启动以带动压扁后的报废汽车向粉碎机的方向运动;步骤s4,所述中控单元控制机械爪对压扁后的报废汽车的尾部进行抓取且第二传送带跟随所述第一传送带以带动机械爪向所述粉碎机的方向运动;步骤s5,所述机械爪向下运动以使所述粉碎机粉碎压扁后的报废汽车。
7.进一步地,所述步骤s2包括以下步骤:步骤s21,所述中控单元控制检测单元对报废汽车的状态参数进行检测;步骤s22,根据步骤s21的检测结果将所述压扁单元中对应部件的工作参数调节至对应值;步骤s23,所述中控单元控制液压杆启动以带动压板向下运动;
步骤s24,所述中控单元控制所述检测单元对报废汽车的压扁程度进行检测,若压扁程度不符合要求,转至步骤s22。
8.进一步地,当步骤s21和步骤s22进行时,所述中控单元将尖柱体夹块的开合角度记为β并将β调节至第一预设开合角度β1,中控单元将尖柱体夹块的间距记为d并将d调节至初始夹块间距d0,中控单元控制视觉传感器检测报废车辆的宽度b并将b分别与b1和b2进行比较,中控单元中设有第一预设宽度b1、第二预设宽度b2,其中,b1<b2;若b≤b1,所述中控单元判定无需对夹块间距d和夹块开合角度β进行调节;若b1<b≤b2,所述中控单元使用第一夹块间距调节系数α1将夹块间距d调节至对应值并将夹块开合角度β调节为第二预设开合角度β2;若b>b2,所述中控单元使用第二夹块间距调节系数α2将夹块间距d调节至对应值并将夹块开合角度β调节为第三预设开合角度β3。
9.进一步地,当步骤s21和步骤s22进行时,所述中控单元将所述夹板的伸长量记为e,中控单元控制视觉传感器检测报废车辆的高度h并将h和hmax进行比较,中控单元中设有预设高度临界值hmax、第一预设夹板下降高度e1、第二预设夹板下降高度e2,其中,e1<e2;若h>hmax,所述中控单元运行两次步骤s23并将所述夹板伸长量e分别设置为e1和e2;若h≤hmax,所述中控单元运行步骤s23并将所述夹板伸长量e设置为e2;所述中控单元中设有初始夹块伸长量l0、第一预设高度h1、第二预设高度h2,其中,h1<h2<hmax,中控单元将所述尖柱体夹块的伸长量记为l并将l调节至l0,中控单元将h分别与h1、h2和h3进行比较;若h≤h1,所述中控单元使用第一预设夹块伸长量调节系数γ1对夹块伸长量l进行调节;若h1<h≤h2,所述中控单元判定无需对夹块伸长量l进行调节;若h2<h≤h3,所述中控单元使用第一预设夹块伸长量调节系数γ1对夹块伸长量l进行调节;若h>h3,所述中控单元使用第二预设夹块伸长量调节系数γ2对夹块伸长量l进行调节。
10.进一步地,当步骤s21和步骤s22进行时,所述中控单元控制距离传感器检测报废车辆的外壳厚度t并将t分别与t1和t2进行比较,中控单元中设有与第一预设夹板下降高度e1相对应的第一预设液压杆压力f1、与第二预设夹板下降高度e2相对应的第二预设液压杆压力f2、第一预设外壳厚度t1、第二预设外壳厚度t2,其中,f1<f2;若t<t1,所述中控单元使用第一压力调节系数δ1将第一预设液压杆压力f1和第二预设液压杆压力f2调节至对应值;若t1≤t≤t2,所述中控单元判定无需对第一预设液压杆压力f1和第二预设液压杆压力f2进行调节;若t>t2,所述中控单元使用第二压力调节系数δ2将第一预设液压杆压力f1和第二预设液压杆压力f2调节至对应值。
11.进一步地,当步骤s23运行完成时,运行步骤s24,中控单元控制密度传感器检测压扁后的报废汽车的密度ρ并将ρ分别与ρ1和ρ2进行比较,所述中控单元中设有第一预设密度
ρ1和第二预设密度ρ2,其中,ρ1<ρ2;若ρ<ρ1,所述中控单元初步判定因压扁过度导致压扁不符合标准;若ρ1≤ρ<ρ2,所述中控单元判定因压扁过轻导致压扁不符合标准;若ρ≥ρ2,所述中控单元初步判定压扁符合标准。
12.进一步地,当所述中控单元判定因压扁过度导致压扁不符合标准时,中控单元控制粒径传感器检测压扁后的报废汽车的平均粒径r并将r和r0进行比较,中控单元中设有预设平均粒径r0,;若r≥r0,所述中控单元判定压扁后的报废汽车未产生大面积破碎并继续运行步骤s3,中控单元进而判定压扁后报废汽车因压扁过轻导致压扁不符合标准;若r<r0,所述中控单元判定压扁后的报废汽车产生大面积破碎,降低步骤s3中传送带的速度运行步骤s3,在步骤s3运行完成后,中控单元控制所述机械爪将所述压扁箱内和传送带上残留的报废汽车碎片放入所述粉碎机,中控单元重新对预设标准参数进行校准和修订。
13.进一步地,当所述中控单元判定因压扁过度导致压扁不符合标准时,中控单元将初次压扁使用的压力记为f,中控单元控制硬度传感器检测报废汽车的硬度y并将y分别和y1和y2进行比较,中控单元中设有第一预设硬度y1、第二预设硬度y2,其中,y1<y2;若y<y1,所述中控单元使用第二压力调节系数δ2将液压杆压力f调节至对应值;若y1≤y<y2,所述中控单元使用第三压力调节系数δ3将液压杆压力f调节至对应值;若y≥y2,所述中控单元使用第四压力调节系数δ4将液压杆压力f调节至对应值。
14.进一步地,当所述中控单元初步判定压扁符合标准时,中控单元控制视觉传感器识别压扁后的报废汽车并根据识别结果计算凹凸角度s并将s和s0进行比较,中控单元中设有预设凹凸角度s0;若s≥s0,所述中控单元进一步判定压扁符合标准并继续运行步骤s3;若s<s0,所述中控单元进一步判定压扁不符合标准并判定尖柱体压块故障。
15.进一步地,当运行步骤s4时,所述中控单元控制所述机械爪对步骤s23中打孔钻头钻出的孔进行抓取。
16.与现有技术相比,本发明的有益效果在于,本发明改变压扁后的最终产品的表面平坦结构,增加有力支撑点,提高了后续粉碎辊对其进行破碎的工作效率,本发明使用机械爪对压扁后的报废汽车进行夹持,使报废汽车以缓慢的速度逐级被粉碎机破碎,有效避免了报废汽车在粉碎机内部不断反转破碎的过程,提高了粉碎的效率,本发明还通过中控单元对压扁的过程进行反馈调节,逐步优化计算机的工作效率,使压扁过程逐渐趋于一次完成,进而提高了对报废汽车的压扁效率,进一步提高了报废汽车进行回收处理的效率。
17.进一步地,本发明通过视觉传感器检测报废汽车的宽度并根据宽度对压棱装置尖柱状夹块的间距进行调节,以保证压扁后的报废汽车的棱角均匀分布,提高了本发明压棱位置的准确性,避免了因报废汽车宽度过小导致的无效压棱的情况,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
18.进一步地,本发明通过视觉传感器检测报废汽车的高度并根据高度对压扁装置夹板的下降高度进行调节,以保证压扁后的报废汽车的压扁程度具有特异性,提高了本发明
压扁装置对不同型号车辆的适应性,避免了因报废汽车过矮导致的无效压制的情况,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
19.进一步地,本发明对无法一次性压扁成功的汽车采取双压扁过程,有效保护了压扁单元中的压扁箱与夹板,提高了压扁单元中设备的使用寿命,节省了维修成本和维修时间,进而提高了报废汽车进行回收处理的效率。
20.进一步地,本发明通过距离传感器检测报废车辆的外壳厚度,并根据外壳厚度对液压杆的压力进行调节,以保证液压杆带动夹板的实际伸长量符合预设伸长量,提高了本发明压扁装置对不同型号车辆的适应性,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
21.进一步地,本发明中控单元在第一次压扁过程完成时控制密度传感器对压扁后的报废汽车的密度进行检测并根据检测结果判定对报废汽车的压扁程度是否符合标准,并在不符合标准时分情况及时改变运行方法,提高了设备对方法应用的机动性,也提高了计算机的自学习水平,为报废汽车回收的智能化奠定了基础。
22.进一步地,本发明在第一次压扁程度不符合标准时调节压扁单元中对应部件的工作参数并对报废汽车实行二次压制,以保证每个压扁后的报废汽车均符合标准,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
附图说明
23.图1为本发明用于报废汽车零部件无害化处理方法的系统流程图;图2为使用本发明用于报废汽车零部件无害化处理方法的设备的结构示意图;图3为本发明实施例压扁机的正视图;图4为本发明实施例压扁机的侧视图;图5为本发明实施例的图3所示a处结构放大图。
具体实施方式
24.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
25.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
26.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
27.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
28.请参阅图1所示,其为本发明用于报废汽车零部件无害化处理方法的系统流程图,
本发明提供一种用于报废汽车零部件无害化处理方法,包括以下步骤:步骤s1,将拆解后的报废汽车放入压扁箱1;步骤s21,中控单元控制检测单元对报废汽车的状态参数进行检测;步骤s22,根据步骤s21的检测结果将压扁单元中对应部件的工作参数调节至对应值;步骤s23,中控单元控制液压杆3启动以带动压板2向下运动;步骤s24,中控单元控制检测单元对报废汽车的压扁程度进行检测,若压扁程度不符合要求,转至步骤s22;步骤s3,中控单元控制第一传送带6启动以带动压扁后的报废汽车向粉碎机8的方向运动;步骤s4,中控单元控制机械爪7对压扁后的报废汽车的尾部进行抓取且第二传送带71跟随第一传送带6以带动机械爪7向粉碎机8的方向运动;当运行步骤s4时,中控单元控制机械爪7对步骤s23中打孔钻头5钻出的孔进行抓取,步骤s5,机械爪7向下运动以使粉碎机8粉碎压扁后的报废汽车。
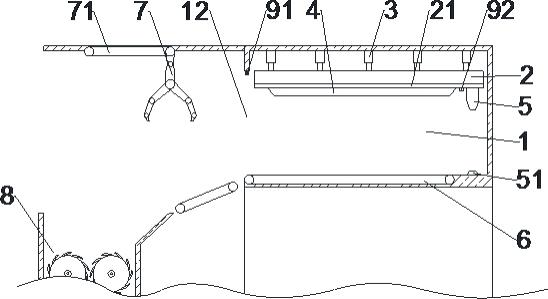
29.请参阅图2、图3和图4所示,图2为使用本发明用于报废汽车零部件无害化处理方法的设备的结构示意图,图3为本发明实施例压扁机的正视图,图4为本发明实施例压扁机的侧视图;使用本发明用于报废汽车零部件无害化处理方法的设备包括:压扁单元,其包括压扁箱1、压扁箱门11、压扁箱出口12、压板2、液压杆3、若干尖柱状夹块4、夹板挡块21、打孔钻头5、打孔钻头底座51和第一传送带6,用以将拆解后的报废汽车压扁至符合粉碎条件的状态;粉碎单元,其包括机械爪7、第二传送带71和粉碎机8,用以对压扁后的报废汽车进行破碎;检测单元,其分别设置在压扁单元中的对应部件上,其包括视觉传感器91、距离传感器92、密度传感器93、粒径传感器94和硬度传感器95,用以对报废汽车的状态参数进行检测;中控单元,其分别与压扁单元、粉碎单元以及检测单元中的对应部件相连,用以根据检测单元检测的报废汽车的状态参数判定压扁单元对报废汽车的压扁过程是否符合标准,中控单元在对压扁单元对报废汽车的压扁程度的判定过程中根据检测单元检测的报废汽车的状态参数对压扁单元和粉碎单元中对应部件的工作参数进行调节并控制压扁单元和粉碎单元中对应部件的启动以推动报废汽车零部件无害化处理方法的进行。
30.具体而言,所述压扁单元包括:压扁箱1,构成压扁单元的主体,用以放置拆解后的报废汽车,压扁箱门11,其设置在压扁箱1的宽侧方一侧,用以打开压扁箱1,压扁箱出口12,其设置在压扁箱1的窄侧方一侧,用以输出压扁后的报废汽车,压板2,其设置在压扁箱1内部,用以与压扁箱1底部相配合对报废汽车进行压扁,液压杆3,其分别与压扁箱1的顶部和压板2相连,用以带动压板2运动,若干尖柱状夹块4,其设置在夹板2的下方,请参阅图5所示,其为本发明实施例的图3所示a处结构放大图,尖柱状夹块4与夹板2滑动连接,用以在压扁过程中在报废汽车的
顶端压制出棱状条纹,预先增加破碎支点,以便后续粉碎机8对压扁汽车进行粉碎,夹板挡块21,其设置在夹板2的下方靠近边缘一侧,用以防止尖柱状夹块4亚棱过程中边缘汽车翘起,打孔钻头5,其设置在夹板2的下方靠近尾部一侧,打孔钻头底座51,其设置在压扁箱内部下方且与打孔钻头5的位置相对应,打孔钻头5和打孔钻头底座51相配合,用以在压扁汽车上钻孔以便机械爪6对压扁汽车进行抓取,第一传送带6,其设置在压扁箱1内下方一侧的凹槽内,用以输出压扁后的报废汽车。
31.具体而言,所述粉碎单元包括:机械爪7,用以对压扁汽车进行夹取以控制压扁汽车在粉碎机8内的下降速度,第二传送带71,其设置在机械爪7的上方一侧,用以带动机械爪7进行横向移动,粉碎机8,其设置在压扁箱1的一侧,用以将压扁箱1压扁后的报废汽车进行粉碎。
32.具体而言,所述检测单元包括:视觉传感器91,其设置在压扁箱出口12的上方一侧,用以对报废车辆进行识别并检测报废车辆的宽度和高度,距离传感器92,其设置在夹板2的下方一侧,用检测报废车辆的外壳厚度,密度传感器93,其设置在压扁箱1内的侧方凹槽内,用以检测压扁后的报废汽车的密度,粒径传感器94,其设置在压扁箱1内的侧方凹槽内,用以检测压扁后的报废汽车的平均粒径,硬度传感器95,其设置在压扁箱1内的侧方凹槽内,用以检测报废汽车的硬度,本领域技术人员可以理解的是,本实施例的视觉传感器91、距离传感器92、密度传感器93、粒径传感器94和硬度传感器95的设定位置根据实际压扁箱1的结构和形状设置即可,只需能够获取对应信息参数即可,至于采用何种传感器类型,也可根据实际使用环境以及具体传输效率确定。
33.本发明改变压扁后的最终产品的表面平坦结构,增加有力支撑点,提高了后续粉碎辊对其进行破碎的工作效率,本发明使用机械爪7对压扁后的报废汽车进行夹持,使报废汽车以缓慢的速度逐级被粉碎机8破碎,有效避免了报废汽车在粉碎机8内部不断反转破碎的过程,提高了粉碎的效率,本发明还通过中控单元对压扁的过程进行反馈调节,逐步优化计算机的工作效率,使压扁过程逐渐趋于一次完成,进而提高了对报废汽车的压扁效率,进一步提高了报废汽车进行回收处理的效率。
34.当步骤s21和步骤s22进行时,所述中控单元中设有初始夹块间距d0、第一预设宽度b1、第二预设宽度b2、第一夹块间距调节系数α1、第二夹块间距调节系数α2、第一预设开合角度β1、第二预设开合角度β2和第三预设开合角度β3,其中,b1<b2,1<α1<α2<1.5,β1<β2<β3,中控单元将所述尖柱体夹块4的开合角度记为β并将β调节至β1,中控单元将所述尖柱体夹块4的间距记为d并将d调节至d0,中控单元控制视觉传感器91检测报废车辆的宽度b、将b分别与b1和b2进行比较并根据比较结果判定是否需要对夹块间距d进行调节;若b≤b1,所述中控单元判定无需对夹块间距d和夹块开合角度β进行调节;若b1<b≤b2,所述中控单元使用α1将夹块间距d调节至对应值并将夹块开合角度
β调节为β2;若b>b2,所述中控单元使用α2将夹块间距d调节至对应值并将夹块开合角度β调节为β3;当所述中控单元使用αi对夹块间距d进行调节时,设定i=1,2,调节后的尖柱体夹块4的间距记为d’,d’=d0
×
αi;当所述中控单元完成对夹块间距d的调解时,运行步骤s23,中控单元控制打孔钻头5打开并控制液压杆3启动以带动压板2向下运动。
35.本发明通过视觉传感器91检测报废汽车的宽度并根据宽度对压棱装置尖柱状夹块4的间距进行调节,以保证压扁后的报废汽车的棱角均匀分布,提高了本发明压棱位置的准确性,避免了因报废汽车宽度过小导致的无效压棱的情况,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
36.当步骤s21和步骤s22进行时,所述中控单元中设有预设高度临界值hmax、第一预设夹板下降高度e1、第二预设夹板下降高度e2,其中,e1<e2,中控单元将所述夹板的伸长量记为e,中控单元控制视觉传感器91检测报废车辆的高度h、将h和hmax进行比较、根据比较结果判定报废车辆的高度是否符合压扁条件并分情况采取对应的措施;若h>hmax,所述中控单元将夹板伸长量e设置为e1,运行步骤s23,中控单元控制液压杆3带动压板2向下运动e1,控制液压杆3带动压板2向上运动至初始位置处,控制液压杆3带动压板2向下运动e2;若h≤hmax,所述中控单元将夹板伸长量e设置为e2,当运行步骤s23时,中控单元控制液压杆3带动压板2向下运动e2;所述中控单元中设有初始夹块伸长量l0、第一预设高度h1、第二预设高度h2、第一预设夹块伸长量调节系数γ1和第二预设夹块伸长量调节系数γ2,其中,h1<h2<hmax,γ1<1<γ2<1.5,中控单元将所述尖柱体夹块4的伸长量记为l并将l调节至l0,中控单元将h分别与h1、h2和h3进行比较并根据比较结果判定是否需要对夹块伸长量l进行调节;若h≤h1,所述中控单元使用γ1对夹块伸长量l进行调节;若h1<h≤h2,所述中控单元判定无需对夹块伸长量l进行调节;若h2<h≤h3,所述中控单元使用γ1对夹块伸长量l进行调节;若h>h3,所述中控单元使用γ2对夹块伸长量l进行调节;当所述中控单元使用γj对夹块伸长量l进行调节时,设定j=1,2,调节后的尖柱体夹块4的伸长量记为l’,l’=l0
×
γj;本发明通过视觉传感器91检测报废汽车的高度并根据高度对压扁装置夹板2的下降高度进行调节,以保证压扁后的报废汽车的压扁程度具有特异性,提高了本发明压扁装置对不同型号车辆的适应性,避免了因报废汽车过矮导致的无效压制的情况,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
37.本发明对无法一次性压扁成功的汽车采取双压扁过程,有效保护了压扁单元中的压扁箱1与夹板2,提高了压扁单元中设备的使用寿命,节省了维修成本和维修时间,进而提高了报废汽车进行回收处理的效率。
38.当步骤s21和步骤s22进行时,所述中控单元中设有与第一预设夹板下降高度e1相对应的第一预设液压杆压力f1、与第二预设夹板下降高度e2相对应的第二预设液压杆压力
f2、第一预设外壳厚度t1、第二预设外壳厚度t2、第一压力调节系数δ1和第二压力调节系数δ2,其中,f1<f2,0.8<δ1<1<δ2<1.2,中控单元控制距离传感器92检测报废车辆的外壳厚度t、将t分别与t1和t2进行比较并根据比较结果判定是否需要对第一预设液压杆压力f1和第二预设液压杆压力f2进行调节;若t<t1,所述中控单元使用δ1将第一预设液压杆压力f1和第二预设液压杆压力f2调节至对应值;若t1≤t≤t2,所述中控单元判定无需对第一预设液压杆压力f1和第二预设液压杆压力f2进行调节;若t>t2,所述中控单元使用δ2将第一预设液压杆压力f1和第二预设液压杆压力f2调节至对应值;当所述中控单元使用δk对第一预设液压杆压力f1和第二预设液压杆压力f2进行调节时,设定k=1,2,调节后的第一预设液压杆压力记为f1’,调节后的第二预设液压杆压力记为f2’,f1’=f1
×
δk,f2’=f2
×
δk;本发明通过距离传感器92检测报废车辆的外壳厚度,并根据外壳厚度对液压杆3的压力进行调节,以保证液压杆3带动夹板2的实际伸长量符合预设伸长量,提高了本发明压扁装置对不同型号车辆的适应性,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
39.当步骤s23运行完成时,运行步骤s24,所述中控单元中设有第一预设密度ρ1和第二预设密度ρ2,其中,ρ1<ρ2,中控单元控制密度传感器93检测压扁后的报废汽车的密度ρ、将ρ分别与ρ1和ρ2进行比较、根据比较结果判定压扁是否符合标准;若ρ<ρ1,所述中控单元初步判定因压扁过度导致压扁不符合标准并根据粒径传感器94测得的压扁后报废汽车的平均粒径进一步判定压扁不符合标准的原因;若ρ1≤ρ<ρ2,所述中控单元判定因压扁过轻导致压扁不符合标准、根据硬度传感器95测得的报废汽车的硬度重新对压扁单元中对应部件的工作参数进行调节并在调节后对报废汽车进行二次压扁;若ρ≥ρ2,所述中控单元初步判定压扁符合标准并根据视觉传感器91测得的压扁后的报废汽车的凹凸角度进一步判定压扁是否符合标准;当所述中控单元判定因压扁过度导致压扁不符合标准时,中控单元中设有预设平均粒径r0,中控单元控制粒径传感器94检测压扁后的报废汽车的平均粒径r、将r和r0进行比较、根据比较结果判定压扁后的报废汽车是否产生大面积破碎并根据报废汽车的破碎情况调节后续步骤;若r≥r0,所述中控单元判定压扁后的报废汽车未产生大面积破碎并继续运行步骤s3,中控单元进而判定压扁后报废汽车因压扁过轻导致压扁不符合标准;若r<r0,所述中控单元判定压扁后的报废汽车产生大面积破碎,降低步骤s3中第一传送带6的速度运行步骤s3,在步骤s3运行完成后,中控单元控制机械爪7将压扁箱1内和第一传送带6上残留的报废汽车碎片放入粉碎机8,中控单元重新对预设标准参数进行校准和修订;当所述中控单元初步判定压扁符合标准时,中控单元中设有预设凹凸角度s0,中控单元控制视觉传感器91识别压扁后的报废汽车并根据识别结果计算凹凸角度s,中控单
元将s和s0进行比较并根据比较结果进一步判定压扁是否符合标准;若s≥s0,所述中控单元进一步判定压扁符合标准并继续运行步骤s3;若s<s0,所述中控单元进一步判定压扁不符合标准并判定所述尖柱体压块故障;本发明通过距离传感器95检测报废车辆的外壳厚度,并根据外壳厚度对液压杆3的压力进行调节,以保证液压杆3带动夹板2的实际伸长量符合预设伸长量,提高了本发明压扁装置对不同型号车辆的适应性,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
40.当所述中控单元判定因压扁过度导致压扁不符合标准时,中控单元中设有第一预设硬度y1、第二预设硬度y2、第三压力调节系数δ3和第四压力调节系数δ4,其中,y1<y2,1<δ2<δ3<δ4<1.8,中控单元将初次压扁使用的压力记为f,中控单元控制硬度传感器95检测报废汽车的硬度y、将y分别和y1和y2进行比较并根据比较结果重新对液压杆压力f进行调节;若y<y1,所述中控单元使用δ2将液压杆压力f调节至对应值;若y1≤y<y2,所述中控单元使用δ3将液压杆压力f调节至对应值;若y≥y2,所述中控单元使用δ4将液压杆压力f调节至对应值;当所述中控单元使用δk对液压杆压力f进行调节时,设定k=2,3,4,调节后的第一预设液压杆压力记为f’,调节后的液压杆压力记为f’,f’=f
×
δk,当针对液压杆压力f的调节完成时转至步骤s22。
41.本发明在第一次压扁程度不符合标准时调节压扁单元中对应部件的工作参数并对报废汽车实行二次压制,以保证每个压扁后的报废汽车均符合标准,提高了设备的智能化水平,进一步提高了报废汽车进行回收处理的效率。
42.本领域技术人员可以理解的是,本实施例的加速度传感器以及位移传感器的设定位置根据实际钢岔枕的结构和形状设置即可,只需能够获取加速度和位移信息即可,至于采用何种传感器类型,也可根据实际使用环境以及具体传输效率确定。
43.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
44.以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。