1.本公开的实施例涉及用于在自动化实验室系统内的各个位置之间运送样品容器的载体、系统和方法。
背景技术:
2.自动化实验室系统可以具有在实验室内的各个位置之间运送样品的自动化输送机组合件。这些输送机组合件可以通过接合与容纳待处理的样品的容器联接的载体(例如,圆盘)而与样品容器介接。为了运送所述载体并进而运送容纳样品的容器,将载体放置在输送机组合件上,并且输送机组合件在实验室内的各个位置之间运送载体和与所述载体联接的容器。所述载体被配置成在载体在各个位置之间移动时维持样品容器的定向。
3.为了进一步使此过程自动化,可以使用自动化机器人(例如,拾放机器人)以将容纳样品的容器与载体联接。例如,拾放机器人可以抓住容纳样品的容器并将所述容器与载体联接,例如,通过将容器插入到载体内的凹部中。在容器和载体联接之后,自动化输送机组合件可以使载体和容器在系统的各个位置之间移动。
技术实现要素:
4.在一些实施例中,一种用于运送样品容器的载体包含基部,所述基部具有顶端,所述顶端限定用于收纳所述样品容器的底端的凹部。所述载体还包含:环形支撑件,所述环形支撑件联接到所述基部的所述顶端并环绕所述凹部;以及多个弹性金属丝指状物,所述多个弹性金属丝指状物附连到所述环形支撑件并从所述环形支撑件向上延伸,所述多个弹性金属丝指状物被配置成:将所述样品容器的所述底端保持在所述基部的所述凹部内;并且使所述样品容器保持处于基本上直立定向,每个弹性金属丝指状物都包括邻近所述基部的第一区段、连接到所述第一区段的线性第二区段以及连接到所述第二线性区段的线性第三区段。每个弹性金属丝指状物的所述第一区段和所述第二区段通过所述弹性金属丝指状物的第一成角度部分连接。所述第一成角度部分将所述第二区段朝所述载体的纵轴定向。每个弹性金属丝指状物的所述第二区段和所述第三区段通过所述弹性金属丝指状物的第二成角度部分连接。所述第二成角度部分将所述第三区段远离所述载体的所述纵轴定向。每个弹性金属丝指状物的所述第三区段被配置成在所述容器插入到所述载体中时与所述容器的所述底端接触。所述第三区段和所述载体的所述纵轴形成介于40
°
与50
°
之间的角度。
5.在一些实施例中,每个弹性金属丝指状物还包含第四区段。每个弹性金属丝指状物的所述第三区段和所述第四区段通过所述弹性金属丝指状物的第三成角度部分连接。所述第三成角度部分不将所述第四区段朝所述载体的所述纵轴定向。
6.在一些实施例中,所述第四区段为线性区段。在一些实施例中,所述第四区段从所述弹性金属丝指状物的所述第三成角度部分向下延伸。在一些实施例中,所述第四区段总体上平行于所述载体的所述纵轴。在一些实施例中,所述第四区段具有第四区段长度,并且所述第三区段具有大于所述第四长度的第三区段长度。在一些实施例中,所述第二区段具
有大于所述第四区段长度的第二区段长度。在一些实施例中,所述第三区段长度大于所述第二区段长度。在一些实施例中,所述第三区段长度比所述第二区段长度大至少20%。
7.在一些实施例中,所述第三区段长度大于所述第二区段长度。在一些实施例中,所述第三区段长度比所述第二区段长度大至少20%。
8.在一些实施例中,所述第一区段是线性区段。
9.在一些实施例中,由所述第三区段与所述纵轴形成的角度介于42.5
°
与47.5
°
之间。在一些实施例中,所述角度为45
°
。
10.在一些实施例中,所述多个弹性金属丝指状物包括至少五个等距间隔开的弹性金属丝指状物。在一些实施例中,所述多个弹性金属丝指状物由八个等距间隔开的弹性金属丝指状物组成。
11.在一些实施例中,所述弹性金属丝指状物被大小设定和布置成使得附连到所述样品容器的机器可读标签可被标签读取装置读取。
12.在一些实施例中,所述多个弹性金属丝指状物的所述第二成角度部分被配置成当所述样品容器的所述底端与所述凹部的底部接触时作为所述多个弹性金属丝指状物与所述样品容器的圆柱形侧壁之间的唯一接触点。所述多个弹性金属丝指状物中的每个弹性金属丝指状物的所述第二成角度部分与所述凹部的所述底部相距至少30mm。
13.在一些实施例中,所述多个弹性金属丝指状物的所述第二成角度部分具有共同高度。在一些实施例中,所述基部包括塑料圆柱体,并且其中所述环形支撑件包括金属。所述基部可以含有磁体。所述基部可以包含多个间隔开的径向延伸的环形凸缘。所述基部可以包含三个所述径向延伸的环形凸缘,所述径向延伸的凸缘之一形成所述基部的底部。
14.在一些实施例中,所述多个弹性金属丝指状物中的每个弹性金属丝指状物由规格在约0.6mm到约1.0mm的范围内的不锈钢形成。
15.在一些实施例中,所述样品容器的所述底端的中心可以从所述载体的所述纵轴偏离至多6mm,而不会显著影响将所述样品容器插入到所述载体中所需的力。
16.在一些实施例中,一种运送样品容器的方法包含用第一拾放机器人抓住所述样品容器,并且用所述第一拾放机器人将所述样品容器插入到载体中,例如根据以上实施例中的任一项所述的载体。沿插入方向将所述样品容器的所述底端插入到所述基部的所述凹部中。所述方法还包含在输送机上将具有所插入的样品容器的所述载体运送到沿所述输送机布置的多个仪器中的至少一个仪器。
17.在一些实施例中,插入到所述载体中的所述样品容器是自立式样品容器。
18.在一些实施例中,所述方法还包含在所述输送机上的第一位置处从所述载体中取出所述样品容器,并且用第二拾放机器人将所取出的样品容器运送到所述多个仪器之一中。
19.在一些实施例中,将所述样品容器插入到所述载体中需要不超过预定最大量的力的插入力。
附图说明
20.并入在本文中并形成本说明书的一部分的附图展示了实施例并且与本说明书一起进一步用于解释本实施例的原理并使相关领域的技术人员能够制造和使用本实施例。
21.图1是根据一实施例的载体的侧视图。
22.图2是根据一实施例的图1所示的载体的顶部透视图。
23.图3是根据一实施例的图1所示的载体的侧面横截面视图连同与所述载体的中心相交的平面。
24.图4是根据一实施例的图1所示的载体的侧面横截面视图连同在样品容器与载体联接时与所述载体的中心相交的平面。
25.图5是根据一实施例的图1所示的载体的顶部视图。
26.图6是根据一实施例的图1所示的载体的底部视图。
27.图7是根据一实施例的图1所示的载体的侧面横截面视图连同在样品容器与载体联接并被拾放机器人抓住时与所述载体的中心相交的平面。
28.本实施例的特征和优点将根据以下结合附图所阐述的具体实施方式而变得更显而易见,在附图中相似的附图在全文中标识对应的元件。
具体实施方式
29.现在将参照附图中所示的实施例来详细描述本公开。对“一个实施例”、“一实施例”、“一些实施例”、“示例性实施例”、“例如”、“一实例”、“示例性”等的引用表明,所描述实施例可以包含特定特征、结构或特性,但是并非每个实施例都一定包含特定特征、结构或特性。此外,这类词组未必是指相同实施例。此外,当结合实施例描述特定特征、结构或特性时,无论是否明确描述,都认为结合其它实施例影响此类特征、结构或特性处于本领域的技术人员的知识范围内。
30.如本文中所使用,“一”意指“至少一个”或“一个或多个”。
31.如本文所用,术语“约”或类似术语适用于本文中指定的所有数值,无论是否确切地指示。此术语通常指在本公开的上下文中,本领域普通技术人员将认为是与所列举的数值的合理偏差量(即具有等效功能或结果)的数字范围。举例来说,但不旨在进行限制,此术语可被解释为包含给定数值的
±
10%的偏差,前提是这类偏差不会改变数值的最终功能或结果。因此,在一些情况下,如本领域普通技术人员将理解的,约1%的值可被解释为在0.9%至1.1%的范围内。
32.如本文所用,术语“邻近”或类似的术语指接近或邻接。相邻的对象可彼此隔开,也可彼此实际或直接接触。在一些情况下,相邻的对象可彼此联接或可彼此一体地形成。
33.如本文所用,术语“基本上”和“实质上”或类似术语指相当大的度或程度。当与例如事件、情况、特性或属性结合使用时,这些术语可指事件、情况、特性或属性精确发生的实例,以及事件、情况、特性或属性接近发生的实例,例如考虑到本文描述的实施例的典型公差水平或可变性。
34.如本文所用,“样品”是指待分析的任何材料,无论其来源如何。所述材料可以呈其天然形式或处于任何处理阶段(例如,所述材料可以是化学改变的,或者其可以是已经从样品的一种或多种其它组分中分离和/或纯化的样品的一种或多种组分)。样品可以从任何来源获得,包含但不限于动物、环境、食品、工业或水来源。动物样品包含但不限于外周血、血浆、血清、骨髓、尿液、胆汁、粘液、痰、唾液、脑脊液、粪便、包含淋巴结的活检组织、呼吸组织或渗出液、胃肠组织、宫颈拭子样品、精液或其它体液或细胞液、组织或分泌物。样品可以在
含有稀释剂、运送介质、防腐剂溶液或其它流体的容器进行稀释或容纳在所述容器中。因此,术语“样品”旨在涵盖稀释剂、运送介质和/或防腐剂或旨在保持样品的其它流体中含有的样品。
35.如本文所用,“样品容器”是指被配置成以天然形式或在任何处理阶段容纳样品的任何类型的流体容器,包含例如管、小瓶、比色皿、盒、微量滴定板等。
36.示例性样品容器运送载体
37.在一些实施例中,载体被配置成与样品容器连接并且与自动化实验室系统的仪器操作性地介接,所述仪器包含例如输送机组合件、样品处理仪器和测定仪器。载体用于使样品容器沿输送机组合件在各个位置、装置或仪器之间移动,如样品容器装载站、封盖器/开盖器、样品处理仪器、测定仪器和/或与自动化实验室系统相关联的储存单元。这种自动化实验室系统的一个实例在于2020年4月23日提交的美国临时申请第63/014,624号中进行了描述。当载体和容器联接时,载体将容器相对于载体保持在已知定向。在一些实施例中,此已知定向是垂直的,而在其它实施例中,已知取向是非垂直的。
38.通过将样品容器相对于载体的定向保持在已知定向,可以通过确定载体的位置来确定容器的位置。这种已知关系允许自动化实验室系统内的自动化仪器与容器介接。示例性自动化仪器可以包含能够对样品进行分析并得出结果的测定仪器,例如,能够对样品执行分子测定(例如,基于核酸的扩增反应)、测序反应、免疫测定或化学分析的任何仪器。在一些实施例中,可以在无需任何样品处理的情况下直接对样品执行测定,而其它样品需要在可以执行测定之前进行处理。在进行测定步骤之前需要某种形式的样品处理的样品在一些实施例中可以包含含有细胞物质、组织、粪便、粘液、精液、脑脊液、血液、骨髓、血清、尿液、胆汁、痰、唾液和外泌体等的样品。示例性测定仪器包含由马萨诸塞州马尔堡的豪洛捷有限公司(hologic,inc.,marlborough,ma)出售的和panther系统。其它示例性自动化仪器可以包含例如能够在对容纳在容器内的样品执行测定之前对样品执行处理步骤,并且不能对样品进行分析和/或提供结果的样品处理仪器。此类样品处理仪器可以包含例如将样品从一个容器转移到另一个容器(例如,在不同的容器类型,如不同尺寸设定的容器之间)但不对样品执行测定的仪器。示例性样品处理仪器是由马萨诸塞州马尔堡的豪洛捷有限公司出售的仪器。除了测定仪器和样品处理仪器之外的自动化仪器或装置,如专用于执行核酸纯化的装置、加盖器/开盖器、输入/输出队列以及储存仪器,可以与载体和与所述载体联接的容器介接。
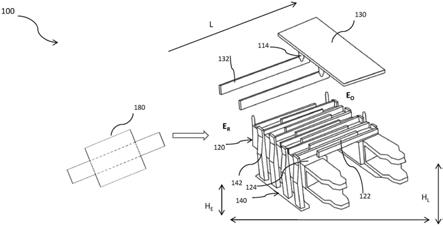
39.图1-7展示了根据一实施例的载体100。载体100包括基部102,所述基部被配置成与例如合适的自动化输送机组合件、测定仪器和处理仪器介接。载体100还包含保持装置103,所述保持装置被配置成将样品容器200固定到基部102。
40.载体100可以被配置成用于与各种类型的输送机组合件和自动化仪器一起使用。例如,载体100可以与包含一个或多个可移动导轨的输送机组合件一起使用,所述可移动导轨限定载体100沿其移动的路径。在一些导轨实施例中,导轨可以是单一皮带或者联接以形成一个或多个皮带的连杆。在此类导轨实施例中,载体100就坐于导轨上并且随着导轨移动而移动。在其它导轨实施例中,磁运动系统可以被定位成位于导轨下方并向载体100提供动力,例如,通过使用被定位成位于导轨下方的铁质线圈和载体100中的一个或多个磁体150,以沿导轨推动载体100。磁运动系统的非限制性示例性实施例的细节在美国专利第9,766,
258号和第9,776,811号中进行了说明和描述。
41.在一些实施例中,基部102具有顶端108和底端110。如图1-7所示,基部102通常是圆柱形的并且在外观上是冰球状的。在其它实施例中,基部102可以具有非圆柱形形状。基部102可以限定凹部112,所述凹部被配置成收纳样品容器200的至少一部分。例如,顶端108可以限定凹部112。凹部112被配置成收纳样品容器200的底端204。
42.在一些实施例中,凹部112的形状基本上对应于样品容器200的形状。例如,如果样品容器200是圆柱形的,则凹部112也可以是圆柱形的。在一些实施例中,凹部112包含深度132,所述深度被配置成收纳样品容器200的底端204。在一些实施例中,凹部112的水平尺寸(例如,如果是圆形,则为直径,或者如果是矩形,则为宽度和长度)等于或大于样品容器200的水平尺寸。在一些实施例中,凹部112被配置成收纳直径在约12mm到约16mm的范围内的圆柱形样品容器200。因此,在此类实施例中,凹部112的直径大于约12mm并且小于约16mm。
43.参考图2-5和7,在一些实施例中,基部102包含环形状的止动件136,所述环形状的止动件限定凹部112的下部部分并抵接基部102的内表面113。在一些实施例中,止动件136包含基部128,所述基部限定凹部112的下端,使得在样品容器200完全插入到凹部112中时样品容器200的底端204与基部128接触。在一些实施例中,止动件136包含上部锥形表面137,所述上部锥形表面在样品容器200插入到载体100中时,可以朝凹部112的中心导引未对准的样品容器200的底端204。
44.如图1中最佳看到的,基部102包含多个间隔开的径向延伸的环形凸缘140。每对相邻的凸缘140限定环形凹槽142,并且凹槽142和凸缘140可以被输送机组合件和/或自动化仪器用来运送或搬运载体100。例如,输送机组合件的相对凸出部可以延伸到上凹槽142中,由此将载体100的基部102向下保持在输送机上(参见例如美国专利第9,766,258号和第9,776,811号)。在一些实施例中,凹槽142还可以由输送机组合件用于维持载体100在输送机组合件上的定向,或者使载体100保持处于不同方向上或转向不同方向。
45.如图1-5和7所示,在一些实施例中,基部102包含三个凸缘140和两个凹槽142。在其它实施例(未示出)中,基部102可以包含少于三个凸缘140和/或少于两个凹槽142。在仍其它实施例中,基部102可以包含多于三个凸缘140和/或多于两个凹槽142。凹槽142可以具有各种形状、大小和定向。在一些实施例中,最底部的凸缘140形成基部102的底端110的一部分。
46.基部102可以由塑料形成。例如,在一些实施例中,基部102可以由超高分子量聚乙烯(uhmwpe)制成。在其它实施例中,基部102可以由如不锈钢等金属形成。
47.在一些实施例中,基部102可以包含磁体150,所述磁体邻近载体100的底表面或形成所述底表面的一部分。磁体150可以被配置成与和输送机组合件相关联的或自动化仪器中的磁体或铁质材料操作性地联接(参见例如美国专利第9,766,258号和第9,776,811号)。
48.在一些实施例中,保持装置103可以包含环形支撑件138和多个向上延伸的金属丝指状物104。金属丝指状物104可以是弹性的,使得指状物104在正常操作期间偏转,并且随后在取出样品容器200之后返回到其相应的原始位置。每个金属丝指状物104被配置成当被基部102收纳时向样品容器200施加径向向内的力。如此,金属丝指状物104共同夹持样品容器200的一部分,由此将样品容器200固定到基部102。
49.金属丝指状物104被配置成提供足够的夹持力以在输送机组合件移动载体100时
或在自动化仪器与样品容器200介接时维持样品容器200的定向和位置。金属丝指状物104也被配置成挠曲,由此允许样品容器200插入在基部102的凹部112内。例如,金属丝指状物104可以由不锈钢制成并且其规格在约0.6mm到约1.0mm的范围内。在一些实施例中,金属丝指状物104是由规格为约0.8mm的不锈钢构造的。在一些实施例中,施加到容器200的夹持力的总和等于或大于约四磅。在其它实施例中,施加到容器200的夹持力的总和等于或大于约6磅。
50.与载体100相关联的指状物104的数量应足以防止样品容器200在相邻的指状物104之间滑动,但是指状物104的数量不应阻止或干扰由机器人插入样品容器200或不应使样品容器200上的机器可读标签208(例如,条形码)模糊。在图1和5所示的实施例中,载体100具有八个指状物104。在其它实施例中,载体100具有多于或少于八个指状物104。在一些实施例中,载体100具有至少五个指状物104。例如,载体100可以具有六个到十个指状物104。如图5最佳看到的,指状物104可以围绕载体100的纵轴va周向地且等距地间隔开。在其它实施例中,相邻的指状物104之间的周向间距可能不相等。
51.支撑件138将指状物104联接到基部102。指状物104可以如通过熔接或焊接附连到支撑件138。在一些实施例中,支撑件138具有环绕凹部112的环形形状,这在图5中最佳地看到。如图1和2最佳看到的,支撑件138联接到基部102的顶端108。在一些实施例中,支撑件138可以使用紧固件(例如,螺钉或螺栓)联接到基部102。在其它实施例中,支撑件138可以使用卡扣配合或摩擦配合联接到基部102。如图2和5最佳看到的,指状物104附连在从支撑件138的外周边沿径向方向向内间隔开的位置处。
52.支撑件138可以由金属制成。例如,支撑件138可以由不锈钢制成。
53.如图1-4和7最佳看到的,指状物104从支撑件138向上延伸并远离基部102。在一些实施例中,每个指状物104至少包含第一区段114、连接到第一区段114的第二区段116以及连接到第二区段116的第三区段118。第一区段114邻近基部102并从支撑件138延伸。在一些实施例中,如图1-4和7所示的那些中,第一区段114中的每个第一区段是线性的(即,沿直线或几乎直线延伸)。在一些实施例中,如图1-4和7所示的那些中,第一区段114中的每个第一区段都是垂直定向的。在其它实施例(未示出)中,第一区段114中的一些或全部第一区段都是非线性的(例如,相对于载体100的纵轴va的凸出配置)和/或具有非垂直定向。
54.每个指状物104的第一区段114和第二区段116可以通过将第二区段116朝载体100的纵轴va的第一成角度部分122定向而连接。如图1所示,第二区段116从第一区段114向内和向上延伸。在一些实施例中,第二区段116是线性的,如图1-4所示。在其它实施例(未示出)中,第二区段116可以是非线性的。
55.每个指状物104的第二区段116和第三区段118可以通过将第三区段118远离载体100的纵轴va的第二成角度部分124定向而连接。如图1所示,第三区段118从第二区段116向外并向上延伸。因此,当样品容器200的底端204的底表面212在沿平行于纵轴va的方向插入样品容器200时与指状物104的第三区段118接触时,指状物104(包含成角度部分124)径向向外偏转,由此允许将样品容器200完全插入到基部102的凹部112中。由于指状物104的弹性性质,指状物104在由载体100支撑样品容器200时被向内偏置,使得每个指状物104的成角度部分124抵靠样品容器200的外表面夹持。在一些实施例中,指状物104的第二成角度部分124是在样品容器200的底端204与止动件136的基部128接触时作为指状物104与样品容
器200的圆柱形侧壁202的上部部分之间的唯一接触点。
56.如图1-4最佳看到的,第三区段118是线性的并且与载体100的纵轴va形成介于40
°
与50
°
之间、介于42.5
°
与47.5
°
之间或45
°
的角度α。基于第三区段118的角度和线性构造,确定了当样品容器200的底端204的底表面212保持基本恒定时使相应的指状物104向外偏转所需的插入力的量值,而不管沿与通过底表面212接触的第三区段118的确切点如何。因此,样品容器200的纵轴可以从载体100的纵轴va偏离几乎第三区段118的水平投影的长度,而不会显著影响将样品容器200插入到载体100中所需的力。例如,如果第三区段118的水平投影为6mm,则样品容器200的位置可以从载体100的纵轴va偏离至多约6mm,而不会显著影响将样品容器200插入到载体100中所需的力。在一些实施例中,第三区段118被配置成使得水平投影的长度大于或等于拾放机器人的最大水平位置误差与样品容器200的制造公差的总和。
57.金属丝指状物104的此配置是高度有利的,因为尽管拾放机器人的位置误差和/或样品容器200的形状的制造变化,但将样品容器200插入到载体100中所需的插入力保持基本上恒定。(由于制造过程,样品容器200可以具有曲率,这意味着样品容器200可以不具有真正的纵轴,从而使样品容器200的底端204在样品容器200被拾放机器人300抓住并插入到载体100时从载体100的纵轴va偏心)。这在样品容器200是自立式的,即当放置在水平表面上时保持直立的实施例中尤其是一个问题。自立式容器具有“平坦”底部,这意味着其可以具有基本上水平的平面表面,或者可替代地,圆柱形侧壁202的底表面212可以构成样品容器200的最低点,如图4和7所示。与借助于其形状具有固有自引导功能的圆底容器不同,自立式容器不是自引导的。因此,重要的是尽可能使插入力保持恒定,而不管样品容器200的底表面212在何处与载体100的指状物104接触。
58.在一些实施例中,每个指状物104进一步包含第四区段120。第三成角度部分126连接第三区段118和第四区段120。第三成角度部分126将第四区段120定向成使得所述第四区段不朝载体100的纵轴va延伸。例如,如图1、3、4和7最佳看到的,第四区段120可以向下且基本上平行于纵轴va延伸。在一些实施例中,第四区段120可以是线性的,而在其它实施例(未示出)中,第四区段120可以是非线性的。
59.在一些实施例中,第四区段120的长度小于第二区段116或第三区段118的长度。
60.在一些实施例中,第三区段118的长度大于第二区段116的长度。例如,在一些实施例中,第三区段118的长度比第二区段116的长度大至少20%。
61.参考图7,指状物104被大小设定和布置成使得附连到样品容器200的机器可读标签208可以被如条形码读取器等标签读取装置(未示出)读取。例如,指状物104的周向间隔使得指状物104不会使机器可读标签208从标签读取装置的观看路径消失。
62.在一些实施例中,基部128的顶表面127与成角度部分124之间的高度130对于每个指状物104基本上相同。在一些实施例中,基部128的顶表面127与每个指状物104的第二成角度部分124之间的高度130为至少约30mm。
63.在其它实施例(未示出)中,高度130在不同的指状物104的至少一部分之间变化。
64.参考图5,在一些实施例中,保持装置103(包含指状物104)和基部102被配置成收纳高度在介于约75mm与约100mm之间的范围内的样品容器200(不具有盖)。在一些此类实施例中,样品容器200的底表面212到第二成角度部分124之间的距离130可以在约30mm到约
50mm的范围内。例如,距离130可以在约35mm到约45mm的范围内。并且更具体地,距离130可以为约38mm(即,约36mm到约40mm)。如图7所示,当样品容器200完全插入到载体100的凹部112中时,在指状物104上方和样品容器200的盖206下方产生距离304。距离304足以允许拾放机器人300的夹爪臂302抓住样品容器200以插入或取出。
65.拾放机器人是一种电气机械装置,其可使有效载荷(例如,末端执行器,如容器夹爪或拾放爪)沿x、y和/或z方向平移。在一些实施例中,拾放机器人300执行样品处理仪器或测定仪器所需的所有拾放任务。在一些实施例中,拾放机器人300通过控制器被编程为运送样品容器200并将样品容器200的底端204插入到载体100的凹部112中。
66.参考图5,在一些实施例中,指状物104和基部102被配置成收纳直径在约12mm到约16mm的范围内的圆柱形样品容器200。在一些此类实施例中,相对的指状物104的相对的成角度部分124之间的距离146可以介于约11.5mm到约12mm之间,例如为约11.8mm。也就是说,在一些实施例中,距离146小于样品容器200的直径。在一些实施例中,第一区段114之间的弧长可以在约7mm到约10mm的范围内。例如,当相对的第一区段114之间的距离为约18mm时,邻近的第一区段114之间的弧长可为约7mm。在另一实例中,当相对的第一区段114之间的距离为约25mm时,弧长可以为约10mm。
67.现在将描述使用载体100来运送样品容器200的示例性方法。在一些实施例中,运送样品容器200的方法包含用第一拾放机器人300抓住样品容器200。所述方法还使用第一拾放机器人300将样品容器200的底端204插入到载体100的凹部112中,由此将样品容器200和载体100联接。为了将样品容器200的底端204插入到凹部112中,拾放机器人300的夹爪臂302使容器200沿基本上平行于纵轴va的方向移动。在将样品容器200与载体100联接之后,输送机组合件可以将具有所联接的样品容器200的载体100运送到自动化实验室系统内的一个或多个位置。在一些实施例中,自动化实验室系统可以包含在于2017年9月7日发布的美国公开第2017/0254827号或于2020年4月23日提交的美国临时申请第63/014,624号中讨论的各种输送机组合件和仪器。
68.在一些实施例中,所述方法还包含在输送机组合件上的第一位置处从载体100中取出样品容器200,并且用第二拾放机器人将所取出的样品容器200运送到多个仪器之一中。
69.通过控制和计算硬件组件、用户创建的软件、数据输入组件和数据输出组件来实施本公开的各方面。硬件组件包含计算和控制模块(例如,系统控制器),如微处理器和计算机,所述计算和控制模块被配置成通过接收一个或多个输入值、执行存储在非暂时性机器可读介质(例如软件)上的提供用于操纵或另外作用于输入值的指令并输出一个或多个输出值的一种或多种算法来实现计算和/或控制。此类输出可以显示或另外指示给操作者以向操作者提供信息,例如关于仪器的状态或由此执行的过程的信息,或此类输出可以包括对其它过程和/或控制算法的输入。数据输入组件包含用于输入供控制和计算硬件组件使用的数据的元件。这类数据输入可以包括位置传感器、电动机编码器以及手动输入元件,如图形用户界面、键盘、触摸屏、麦克风、开关、手动操作的扫描仪、语音激活的输入端等。数据输出组件可以包括硬盘驱动器或其它存储介质、图形用户界面、监测器、打印机、指示灯或可听信号元件(例如蜂鸣器、喇叭、铃等)。
70.软件包含存储在非暂时性计算机可读介质上的指令,其在由控制和计算硬件执行
时引起所述控制和计算硬件进行一个或多个自动或半自动化过程。
71.尽管参考某些说明性实施例相当详细地描述和展示本公开,包括特征的各种组合和子组合,但所属领域的技术人员应易于了解,本公开的范围内涵盖的其它实施例以及其变化形式和修改。此外,这类实施例、组合和子组合的描述并不意图表示本公开需要除权利要求书中明确叙述的特征或特征组合以外的特征或特征组合。因此,认为本公开包含所附所附权利要求书的精神和范围内涵盖的所有修改和变化形式。
72.本文提及的所有文件均通过引用并入本文。然而,没有准许任何文件是要求保护的主题的现有技术。
73.此外,所附权利要求中不包含呈根据35 u.s.c.
§
112(f)允许的“用于执行特定功能的装置”的格式的语言的那些不旨在根据35 u.s.c.
§
112(f)解释为受限本说明书以及其等同物中描述的结构、材料或行为。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。