1.本实用新型涉及数控加工技术领域,具体为一种自动定位的数控钻床。
背景技术:
2.钻床是具有广泛用途的通用性机床,可对零件进行钻孔、扩孔、铰孔、锪平面和攻螺纹等加工,在钻床上配有工艺装备时,还可以进行镗孔,在钻床上配万能工作台还能进行钻孔、扩孔、铰孔,数控钻床是由钻床发展而来的,数控钻床主要用于钻孔、扩孔、铰孔、攻丝等加工,它是数字控制的以钻削为主的孔加工机床,在使用传统的数控钻床时,首先需要将工件固定到机床的工作台面上,固定需要使用台钳或者压板固定,都需要人工固定,并且固定完成后还需要操作机床来寻找工件的中心定位,然后进行加工,操作麻烦,操作人员的劳动负担大,且加工效率较低,为此,我们提出一种自动定位的数控钻床。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种自动定位的数控钻床,能自动将工件定位夹紧,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种自动定位的数控钻床包括机架、夹持机构、同步机构和驱动机构;
5.机架:其上表面后侧设有立柱,立柱的前侧面滑动连接有固定座,固定座的上表面前侧圆孔内转动连接有主轴,固定座的上表面前侧通过电机座设有主电机,主电机的输出轴和主轴的上端固定连接,固定座的上表面中部螺纹连接有丝杆,立柱的上表面通过固定板设有升降电机,升降电机的输出轴和丝杆的上端固定连接;
6.夹持机构:滑动连接于机架的上表面;
7.同步机构:设置于机架的工作台下表面;
8.驱动机构:设置于机架的工作台下表面前侧,能将工件自动定位锁止,提高了数控钻床的加工效率,减轻了操作人员的劳动负担。
9.进一步的,所述固定座的前侧面设有数控钻床控制器,主电机和升降电机的输入端均电连接数控钻床控制器的输出端,数控钻床控制器的输出端电连接外部电源,提高钻孔精度。
10.进一步的,所述夹持机构包括长滑槽、滑块、垫板和v型块,所述长滑槽对称开设于机架的工作台上表面,长滑槽的内部均对称滑动连接有滑块,纵向对应滑块组成整体的上表面均设有垫板,垫板的上表面均设有型块,方便工件的纵向定位。
11.进一步的,所述同步机构包括齿条座、齿条和齿轮,所述齿条座对称设置于机架的工作台下表面,齿条座的滑槽内均滑动连接有齿条,齿轮与机架工作台下表面的转轴转动连接,两个齿条均与齿轮啮合连接且错位设置,前侧的齿条上表面左侧和左前侧的滑块下表面固定连接,后侧的齿条上表面右侧和右后侧的滑块下表面固定连接,方便工件的横向定位。
12.进一步的,所述驱动机构包括电动推杆、滑管、滑轴、弹簧、和矩形块,所述电动推杆通过推杆座设置于机架的工作台下表面,电动推杆的伸缩端外表面套设有滑管,滑管的内部右端滑动连接有滑轴,滑轴延伸出滑管的右侧面并在端头处设有矩形块,矩形块的后侧面和前侧的齿条前侧面右端固定连接,弹簧设置于电动推杆的伸缩端左侧面和矩形块的右侧面之间,可以将工件夹紧。
13.进一步的,还包括接近开关和金属板,所述接近开关设置于矩形块的下表面,金属板设置于滑管的右侧面,接近开关和金属板配合设置,自动控制驱动机构的停止。
14.与现有技术相比,本实用新型的有益效果是:本自动定位的数控钻床,具有以下好处:
15.1、前侧的齿条沿前侧的齿条座向左滑动,前侧的齿条带动啮合连接的齿轮旋转,齿轮旋转带动后侧的齿条沿后侧的齿条座向右滑动,前侧的齿条带动左前侧的滑块沿长滑槽向右滑动,左前侧的滑块通过垫板带动左侧的v型块右移,同理后侧的齿条通过右后侧的滑块带动右侧的v型块同步左移,两个v型块同步且向相反的方向运动,可以快速找到圆型板的中心,进而能对圆型板自动的定位,方便数控钻床的对工件的定位,提高了数控钻床的加工效率。
16.2、电动推杆工作,电动推杆的伸缩端伸出通过弹簧带动矩形块右移,矩形块带动前侧的齿条沿前侧的齿条座向左滑动,圆型板阻止v型块的移动,同步机构和夹持机构静止,矩形块随前侧的齿条静止,电动推杆继续伸出时将压缩弹簧,滑管随电动推杆的伸缩端右移和矩形块的距离减小,进而接近开关和金属板之间的距离减小,接近开关感应到金属板,接近开关将电信号传输给数控钻床控制器,数控钻床控制器控制电动推杆停止,利用压缩弹簧的作用力将工件夹紧,可以移动电动推杆和弹簧的作用力将工件定位和夹紧,夹紧后自动停止,自动定位夹紧减轻了操作人员的劳动负担。
附图说明
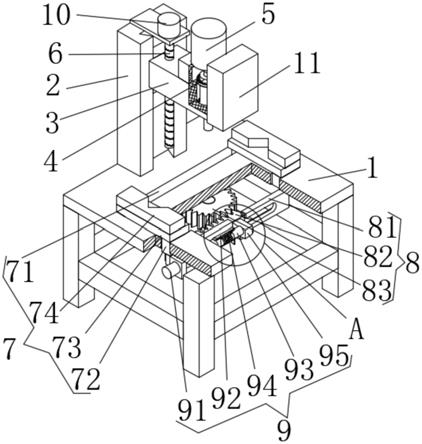
17.图1为本实用新型结构示意图;
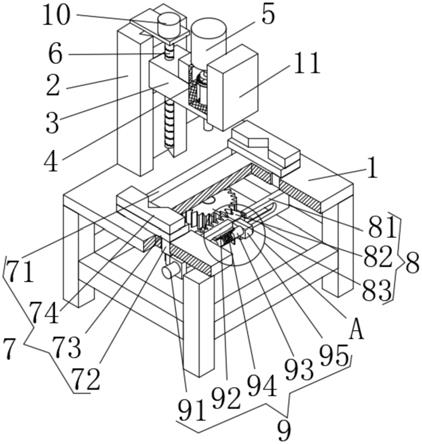
18.图2为本实用新型a处放大结构示意图。
19.图中:1机架、2立柱、3固定座、4主轴、5主电机、6丝杆、7夹持机构、71长滑槽、72滑块、73垫板、74v型块、8同步机构、81齿条座、82齿条、83齿轮、9驱动机构、91电动推杆、92滑管、93滑轴、94弹簧、95矩形块、10升降电机、11数控钻床控制器、12接近开关、13金属板。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1
‑
2,本实施例提供一种技术方案:一种自动定位的数控钻床包括机架1、夹持机构7、同步机构8和驱动机构9;
22.机架1:其上表面后侧设有立柱2,机架1给上方的机构提供了支撑和安装位置,立柱2的前侧面滑动连接有固定座3,立柱2给上方的结构提供了支撑和安装位置,固定座3的
上表面前侧圆孔内转动连接有主轴4,固定座3的上表面前侧通过电机座设有主电机5,主电机5的输出轴和主轴4的上端固定连接,固定座3的上表面中部螺纹连接有丝杆6,立柱2的上表面通过固定板设有升降电机10,升降电机10的输出轴和丝杆6的上端固定连接,主电机5运转,主电机5的输出轴通过主轴4带动钻头旋转,升降电机10运转,升降电机10的输出轴带动丝杆6旋转,旋转的丝杆6带动螺纹连接的固定座3下移,固定座3通过主轴4带动钻头下移,旋转的钻头下移和工件接触开始钻孔工作;
23.夹持机构7:滑动连接于机架1的上表面,夹持机构7包括长滑槽71、滑块72、垫板73和v型块74,长滑槽71对称开设于机架1的工作台上表面,长滑槽71的内部均对称滑动连接有滑块72,纵向对应滑块72组成整体的上表面均设有垫板73,垫板73的上表面均设有v型块74,将需要钻孔的圆型板放置到两个垫板73的上表面,并且和v型块74的v型槽位置对应,进而v型块74的v型槽和圆型板的外弧面接触,此时圆型板阻止v型块74的移动;
24.同步机构8:设置于机架1的工作台下表面,同步机构8包括齿条座81、齿条82和齿轮83,齿条座81对称设置于机架1的工作台下表面,齿条座81的滑槽内均滑动连接有齿条82,齿轮83与机架1工作台下表面的转轴转动连接,两个齿条82均与齿轮83啮合连接且错位设置,前侧的齿条82上表面左侧和左前侧的滑块72下表面固定连接,后侧的齿条82上表面右侧和右后侧的滑块72下表面固定连接,前侧的齿条82沿前侧的齿条座81向左滑动,前侧的齿条82带动啮合连接的齿轮83旋转,齿轮83旋转带动后侧的齿条82沿后侧的齿条座81向右滑动,前侧的齿条82带动左前侧的滑块72沿长滑槽71向右滑动,左前侧的滑块72通过垫板73带动左侧的v型块74右移,同理后侧的齿条82通过右后侧的滑块72带动右侧的v型块74同步左移;
25.驱动机构9:设置于机架1的工作台下表面前侧,驱动机构9包括电动推杆91、滑管92、滑轴93、弹簧94、和矩形块95,电动推杆91通过推杆座设置于机架1的工作台下表面,电动推杆91的伸缩端外表面套设有滑管92,滑管92的内部右端滑动连接有滑轴93,滑轴93延伸出滑管92的右侧面并在端头处设有矩形块95,矩形块95的后侧面和前侧的齿条82前侧面右端固定连接,弹簧94设置于电动推杆91的伸缩端左侧面和矩形块95的右侧面之间,电动推杆91工作,电动推杆91的伸缩端伸出通过弹簧94带动矩形块95右移,矩形块95带动前侧的齿条82沿前侧的齿条座81向左滑动;
26.其中:固定座3的前侧面设有数控钻床控制器11,主电机5和升降电机10的输入端均电连接数控钻床控制器11的输出端,数控钻床控制器11的输出端电连接外部电源,
27.其中:还包括接近开关12和金属板13,接近开关12设置于矩形块95的下表面,金属板13设置于滑管92的右侧面,接近开关12和金属板13配合设置,圆型板阻止v型块74的移动,同步机构8和夹持机构7静止,矩形块95随前侧的齿条82静止,电动推杆91继续伸出时将压缩弹簧94,滑管92随电动推杆91的伸缩端右移和矩形块95的距离减小,进而接近开关12和金属板13之间的距离减小,接近开关12感应到金属板13,接近开关12将电信号传输给数控钻床控制器11,数控钻床控制器11控制电动推杆91停止,利用压缩弹簧94的作用力将工件夹紧。
28.本实用新型提供的一种自动定位的数控钻床的工作原理如下:将需要使用的钻头安装到主轴4的下端,将需要钻孔的圆型板放置到两个垫板73的上表面,并且和v型块74的v型槽位置对应,调控数控钻床控制器11,电动推杆91工作,电动推杆91的伸缩端伸出通过弹
簧94带动矩形块95右移,矩形块95带动前侧的齿条82沿前侧的齿条座81向左滑动,前侧的齿条82带动啮合连接的齿轮83旋转,齿轮83旋转带动后侧的齿条82沿后侧的齿条座81向右滑动,前侧的齿条82带动左前侧的滑块72沿长滑槽71向右滑动,左前侧的滑块72通过垫板73带动左侧的v型块74右移,同理后侧的齿条82通过右后侧的滑块72带动右侧的v型块74同步左移,进而v型块74的v型槽和圆型板的外弧面接触,此时圆型板阻止v型块74的移动,同步机构8和夹持机构7静止,矩形块95随前侧的齿条82静止,电动推杆91继续伸出时将压缩弹簧94,滑管92随电动推杆91的伸缩端右移和矩形块95的距离减小,进而接近开关12和金属板13之间的距离减小,接近开关12感应到金属板13,接近开关12将电信号传输给数控钻床控制器11,数控钻床控制器11控制电动推杆91停止,利用压缩弹簧94的作用力将工件夹紧,主电机5运转,主电机5的输出轴通过主轴4带动钻头旋转,升降电机10运转,升降电机10的输出轴带动丝杆6旋转,旋转的丝杆6带动螺纹连接的固定座3下移,固定座3通过主轴4带动钻头下移,旋转的钻头下移和工件接触开始钻孔工作。
29.值得注意的是,以上实施例中所公开的主电机5、升降电机10、数控钻床控制器11和接近开关12均可根据实际应用场景自由配置,主电机5可选用型号为ecma
‑
c21010rs的伺服电机,升降电机10可选用型号为110sjt
‑
m040d(a)的伺服电机,数控钻床控制器11可选用型号为ms
‑
01的单轴数控钻床控制器,接近开关12可选用型号为lj12a3
‑4‑
z/bx的电感式接近开关,数控钻床控制器11控制主电机5、升降电机10和接近开关12工作采用现有技术中常用的方法。
30.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。