1.本发明属于注塑机械手领域,具体的说是一种智能机械手夹持组件。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3.由于机械手工作的环境大多工作强度大,机械手多安装在大型设备上,在长时间,高负荷的工作后,机械手磨损会非常大,卡爪之间会产生间隙,水平和垂直方向会晃动,影响夹持的稳定性和效率,并且,由于机械手多为纯机械刚性连接,机械手可调节范围有限,精度不高,机械手与工件夹持瞬间压力过大,会损伤机械手和工件。
技术实现要素:
4.本发明的目的在于提供了一种智能机械手夹持组件,以解决上述背景技术中提出的问题。
5.本发明解决其技术问题所采用的技术方案是:本发明所述的一种智能机械手夹持组件,包括外壳;所述外壳的底部固定连接有密封筒,所述密封筒的顶部设置有夹持机构,所述夹持机构位于外壳的内部,所述夹持机构包括弧形板,所述弧形板的下表面活动连接有顶板,所述顶板的下表面固定连接有支撑杆,所述支撑杆的底部设置有调节机构,所述调节机构的下表面固定连接有底板,所述底板的上表面与支撑杆的底端固定连接,所述底板的下表面与密封筒的上表面固定连接,所述底板的顶部设置有止回机构,所述止回机构位于底板与顶板之间,所述止回机构的顶部与顶板的下表面活动连接。
6.所述弧形板包括滑槽,所述滑槽开设在弧形板的壁中,所述滑槽的内表面活动连接有限位销,所述限位销的外表面固定连接有压缩弹簧,所述压缩弹簧的两端均与限位销的外表面固定连接,所述压缩弹簧的内部活动连接有伸缩环,所述伸缩环的两端均与限位销的外表面固定连接,所述伸缩环左侧的外表面活动连接有吸盘,所述吸盘的外表面与弧形板的内表面滑动连接,所述吸盘与弧形板之间固定连接有支撑弹簧,所述支撑弹簧沿弧形板左侧的外表面呈弧形排布。
7.所述调节机构包括固定板,所述固定板的内表面转动连接有转轴,所述转轴的外表面固定连接有转杆,所述转杆的右端活动连接有球头杆,所述球头杆的两端与转杆的内表面转动连接,所述转杆的外表面活动连接有连接杆,所述连接杆的顶端与限位销的下表面固定连接。
8.所述止回机构包括密封环,所述密封环的上表面与顶板的下表面固定连接,所述密封环的下表面转动连接有夹板,所述夹板的外表面固定连接有螺旋发条,所述螺旋发条的内部设置有挡板,所述挡板的下表面与夹板的内表面转动连接,所述挡板的内表面活动连接有推拉杆,所述推拉杆的底端与夹板的内表面活动连接,所述夹板的下表面与球头杆
的外表面相接触。
9.所述密封筒包括螺纹套筒,所述螺纹套筒的内表面螺纹连接有转盘,所述转盘的内表面转动连接有固定盘,所述固定盘的上表面固定连接有顶针,所述顶针的顶端与夹板的下表面相接触,所述顶针的外部设置有t型杆,所述t型杆的顶端与转杆的外表面活动连接。
10.所述固定盘的壁中开设有导气管,所述导气管的底端设置有滚珠,所述滚珠的外表面与固定盘的外表面转动连接,所述滚珠的外表面与转盘的内表面转动连接,所述转盘的壁中固定连接有扰流板,所述固定盘的下表面固定连接有固定轴,所述固定轴的外表面固定连接有折叠板,所述折叠板沿固定轴的外表面呈螺旋上升排布。
11.本发明的有益效果如下:
12.1.本发明通过设置弧形板,当工件插入外壳的内部时,弧形板可以在顶板的上表面做一定程度的调节,增大了通过性,当工件完全进入时,工件表面挤压吸盘的外表面,吸盘向弧形板的内部运动,支撑弹簧压缩,通过减小限位销之间的距离,使得压缩弹簧压缩,同时伸缩环缩短,伸缩环反向挤压吸盘的底部,对其施加一个向外的力,工件在二力平衡下水平静止,吸盘不仅可以增大固定效果,由于其独立活动,也可以适应不同形状的工件的装夹,解决了传统机械手水平夹持不稳定,且夹持范围有限的问题。
13.2.本发明通过设置转盘和固定盘,当转盘的外表面沿螺纹套筒的内表面转动时,固定盘相对转盘静止,t型杆拉动转杆上下运动,转杆拉动连接杆和限位销运动,利用转盘的转动控制限位销的距离,相较于传统的手动控制,螺旋精度更高,且抗冲击效果更好,由于转杆相对独立转动,在球头杆的连接下,一个转杆可以控制一个限位销,一组转杆可以控制一个弧形板,增大水平夹持的同时,也解决了传统机械手手动控制精度低,调节范围有限的问题。
14.3.本发明通过设置止回机构,当转盘与固定盘发生相对转动时,在扰流板和折叠板的共同作用下,外壳内部的空气向外排出,吸盘内部处于负压状态,吸附效果增强,密封环体积增大,密封环的内表面与工件的外表面紧密贴合,当气体抽取刀一定程度时,夹板张角增大,挡板在推拉板的作用下关闭,挡板的外表面与顶针的外表面贴合,由于止回机构内部处于负压状态,工件受到向内的压力,顶针提供向外的支撑力,工件在垂直方向上二力平衡,解决了传统机械手垂直方向上容易晃动的问题。
附图说明
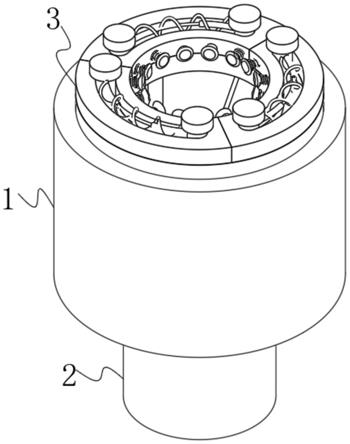
15.图1是本发明的主视图;
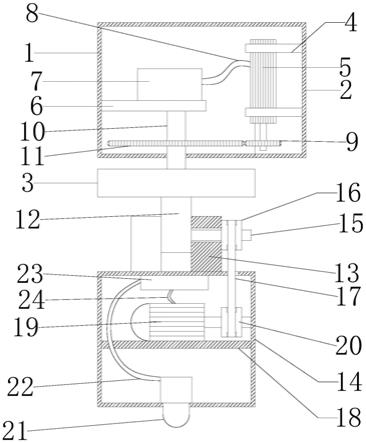
16.图2是本发明剖视图;
17.图3是本发明弧形板的结构示意图;
18.图4是本发明调节机构的结构示意图;
19.图5是本发明止回机构的结构示意图;
20.图6是本发明密封筒的结构示意图;
21.图7是本发明固定盘的结构示意图。
22.图中:外壳1,密封筒2,夹持机构3,弧形板10,顶板11,支撑杆12,调节机构13,底板14,止回机构15,滑槽20,限位销21,压缩弹簧22,伸缩环23,吸盘24,支撑弹簧25,固定板30,
转轴31,转杆32,球头杆33,连接杆34,密封环40,夹板41,螺旋发条42,挡板43,推拉杆44,螺纹套筒50,转盘51,固定盘52,顶针53,t型杆54,导气管55,滚珠56,扰流板57,固定轴58,折叠板59。
具体实施方式
23.使用图1
‑
图7对本发明一实施方式的一种智能机械手夹持组件进行如下说明。
24.如图1
‑
图7所示,本发明的一种智能机械手夹持组件,包括外壳1;外壳1的底部固定连接有密封筒2,密封筒2的顶部设置有夹持机构3,夹持机构3位于外壳1的内部,夹持机构3包括弧形板10,弧形板10的下表面活动连接有顶板11,顶板11的下表面固定连接有支撑杆12,支撑杆12的底部设置有调节机构13,调节机构13的下表面固定连接有底板14,底板14的上表面与支撑杆12的底端固定连接,底板14的下表面与密封筒2的上表面固定连接,底板14的顶部设置有止回机构15,止回机构15位于底板14与顶板11之间,止回机构15的顶部与顶板11的下表面活动连接。
25.弧形板10包括滑槽20,滑槽20开设在弧形板10的壁中,滑槽20的内表面活动连接有限位销21,限位销21的外表面固定连接有压缩弹簧22,压缩弹簧22的两端均与限位销21的外表面固定连接,压缩弹簧22的内部活动连接有伸缩环23,伸缩环23的两端均与限位销21的外表面固定连接,伸缩环23左侧的外表面活动连接有吸盘24,吸盘24的外表面与弧形板10的内表面滑动连接,吸盘24与弧形板10之间固定连接有支撑弹簧25,支撑弹簧25沿弧形板10左侧的外表面呈弧形排布,通过设置弧形板10,当工件插入外壳1的内部时,弧形板10可以在顶板11的上表面做一定程度的调节,增大了通过性,当工件完全进入时,工件表面挤压吸盘24的外表面,吸盘24向弧形板10的内部运动,支撑弹簧25压缩,通过减小限位销21之间的距离,使得压缩弹簧22压缩,同时伸缩环23缩短,伸缩环23反向挤压吸盘24的底部,对其施加一个向外的力,工件在二力平衡下水平静止,吸盘24不仅可以增大固定效果,由于其独立活动,也可以适应不同形状的工件的装夹,解决了传统机械手水平夹持不稳定,且夹持范围有限的问题。
26.调节机构13包括固定板30,固定板30的内表面转动连接有转轴31,转轴31的外表面固定连接有转杆32,转杆32的右端活动连接有球头杆34,球头杆34的两端与转杆32的内表面转动连接,转杆32的外表面活动连接有连接杆34,连接杆34的顶端与限位销21的下表面固定连接。
27.止回机构15包括密封环40,密封环40的上表面与顶板11的下表面固定连接,密封环40的下表面转动连接有夹板41,夹板41的外表面固定连接有螺旋发条42,螺旋发条42的内部设置有挡板43,挡板43的下表面与夹板41的内表面转动连接,挡板43的内表面活动连接有推拉杆44,推拉杆44的底端与夹板41的内表面活动连接,夹板41的下表面与球头杆33的外表面相接触。
28.密封筒2包括螺纹套筒50,螺纹套筒50的内表面螺纹连接有转盘51,转盘51的内表面转动连接有固定盘52,固定盘52的上表面固定连接有顶针53,顶针53的顶端与夹板41的下表面相接触,顶针53的外部设置有t型杆54,t型杆54的顶端与转杆32的外表面活动连接,通过设置止回机构15,当转盘51与固定盘52发生相对转动时,在扰流板57和折叠板59的共同作用下,外壳1内部的空气向外排出,吸盘24内部处于负压状态,吸附效果增强,密封环40
体积增大,密封环40的内表面与工件的外表面紧密贴合,当气体抽取刀一定程度时,夹板41张角增大,挡板43在推拉板44的作用下关闭,挡板43的外表面与顶针53的外表面贴合,由于止回机构15内部处于负压状态,工件受到向内的压力,顶针53提供向外的支撑力,工件在垂直方向上二力平衡,解决了传统机械手垂直方向上容易晃动的问题。
29.固定盘52的壁中开设有导气管55,导气管55的底端设置有滚珠56,滚珠56的外表面与固定盘52的外表面转动连接,滚珠56的外表面与转盘51的内表面转动连接,转盘51的壁中固定连接有扰流板57,固定盘52的下表面固定连接有固定轴58,固定轴58的外表面固定连接有折叠板59,折叠板59沿固定轴58的外表面呈螺旋上升排布,通过设置转盘51和固定盘52,当转盘51的外表面沿螺纹套筒50的内表面转动时,固定盘52相对转盘21静止,t型杆54拉动转杆32上下运动,转杆32拉动连接杆34和限位销21运动,利用转盘51的转动控制限位销21的距离,相较于传统的手动控制,螺旋精度更高,且抗冲击效果更好,由于转杆32相对独立转动,在球头杆33的连接下,一个转杆32可以控制一个限位销21,一组转杆32可以控制一个弧形板10,增大水平夹持的同时,也解决了传统机械手手动控制精度低,调节范围有限的问题。
30.具体工作流程如下:
31.工作时,当工件插入外壳1的内部时,弧形板10可以在顶板11的上表面做一定程度的调节,增大了通过性,当工件完全进入时,工件表面挤压吸盘24的外表面,吸盘24向弧形板10的内部运动,支撑弹簧25压缩,通过减小限位销21之间的距离,使得压缩弹簧22压缩,同时伸缩环23缩短,伸缩环23反向挤压吸盘24的底部,对其施加一个向外的力,工件在二力平衡下水平静止,吸盘24不仅可以增大固定效果,由于其独立活动,也可以适应不同形状的工件的装夹;
32.当转盘51的外表面沿螺纹套筒50的内表面转动时,固定盘52相对转盘21静止,t型杆54拉动转杆32上下运动,转杆32拉动连接杆34和限位销21运动,利用转盘51的转动控制限位销21的距离,相较于传统的手动控制,螺旋精度更高,且抗冲击效果更好,由于转杆32相对独立转动,在球头杆33的连接下,一个转杆32可以控制一个限位销21,一组转杆32可以控制一个弧形板10,增大水平夹持的同时,也解决了传统机械手手动控制精度低,调节范围有限的问题;
33.当转盘51与固定盘52发生相对转动时,在扰流板57和折叠板59的共同作用下,外壳1内部的空气向外排出,吸盘24内部处于负压状态,吸附效果增强,密封环40体积增大,密封环40的内表面与工件的外表面紧密贴合,当气体抽取刀一定程度时,夹板41张角增大,挡板43在推拉板44的作用下关闭,挡板43的外表面与顶针53的外表面贴合,由于止回机构15内部处于负压状态,工件受到向内的压力,顶针53提供向外的支撑力,工件在垂直方向上二力平衡。
34.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。