1.本发明涉及牵引装置技术领域,具体涉及一种电助力牵引装置及控制方法。
背景技术:
2.定滑轮是工业界广泛使用的牵引和抬升机构,其机械特性是只改变拉力方向,不改变拉力大小和牵引行程。与其相对,动滑轮可以改变牵引力大小,但需要牵引行程成反比例变化。例如通过单动滑轮获得2倍拉力大小,则牵引行程也需要相应放大为2倍。杠杆、斜面等手动机构也都具有相似的特性,通过手动机构做功,力与行程的乘机等于输出功,在输出功一定时一者减小另一者就必须相应放大。全电动抬升装置,如卷扬机、电动葫芦等,可以代替人类手工劳动,但生活中还有一些牵引和抬升的场合,其运动的过程十分复杂,对抬升的位移和速度要求非常精确,以至于不能使用纯机动工具来代替手动工作,而同时其负载量又比较大,工作者有省力的愿望和需求,但又不希望付出增加行程的成本。
3.在运动训练界,许多运动项目的训练过程中需要使用到保护带,如跳水、体操、蹦床、攀岩等。保护带是一种常用的运动防护设备,其一端绑扎在运动员身上,另一端经过牵引轮等机构由教练员握持。教练员一方面通过保护带对运动员进行安全防护,另一方面保护带的牵引力还可以改变运动员在空中的运动状态,例如改变运动员在空中转体的速度,延长运动员滞空时间等。这些目的的实现需要依靠教练员非常精确的拉绳手感,不可能用纯机械的方式进行替代。另一方面,教练员在给运动员拉保护带时,其负载是一个人的体重,对教练员来说这不仅是一项重体力劳动,而且还增加了对教练员自身条件的限制:拉保护带的人的体重必须超过被拉的人。这些因素对保护带这种重要的训练方法的扩大使用附加了限制条件,导致很多女性教练、年龄稍大教练无法使用保护带进行训练。
4.因此,运动训练界需要一种既能保持教练员对保护带的精确控制,又能实现牵引力减负的技术方案。
技术实现要素:
5.针对现有技术的不足,本发明的目的在于提供一种电助力牵引装置及控制方法,旨在解决现有技术中牵引装置无法提供助力的技术问题。
6.本发明的一方面在于提供一种电助力牵引装置,所述装置包括:机架;牵引机构,包括绕线筒及设于所述绕线筒外围的牵引轴与负载轴,所述绕线筒、所述牵引轴与所述负载轴分别活动连接于所述机架上;动力电机,设于所述机架上,与所述绕线筒传动连接以为所述绕线筒提供牵引助力;牵引索,至少缠绕所述绕线筒一圈,并且所述牵引索的牵引端穿出所述牵引轴,所述牵引索的负载端穿出所述负载轴;压力传感器,设于所述机架上与所述牵引索的牵引力方向相同的一侧,所述压力
传感器的测量端与所述牵引轴的表面接触,以获取所述牵引轴受压时的压力数据;其中,所述压力传感器将所述压力数据发送至控制器,所述控制器根据所述压力数据调整所述动力电机的工作参数以改变对所述牵引索的牵引助力。
7.与现有技术相比,采用本发明所示的电助力牵引装置的有益效果是:通过压力传感器能够获取牵引索张紧时施加于牵引轴上的压力数据,压力传感器将压力数据发送给控制器,控制器能够对应控制动力电机转动以输出扭矩,从而为牵引索提供牵引助力,便于女性教练、年龄稍大教练使用该装置为运动员训练提供辅助。
8.根据上述技术方案的一方面,所述牵引机构还包括分别设于所述绕线筒两端的安装板,所述绕线筒内穿设有一中轴丝杆,所述中轴丝杆的两端分别固定连接于所述安装板,所述安装板远离所述绕线筒的一端转动连接于所述机架,其中一所述安装板与所述动力电机传动连接。
9.根据上述技术方案的一方面,所述绕线筒的圆周表面设有螺旋形的绕线槽,所述牵引索缠绕于所述绕线槽内,并且所述绕线槽与所述中轴丝杆的螺距相等。
10.根据上述技术方案的一方面,所述绕线筒内穿设有至少两条光轴滑轨,所述光轴滑轨的两端分别固定连接于所述安装板上,并且两条所述光轴滑轨分别设于所述中轴丝杆的两侧;在牵引时,所述绕线筒绕所述中轴丝杆转动,并且所述绕线筒沿所述光轴滑轨滑动。
11.根据上述技术方案的一方面,所述牵引轴上设有牵引轮,所述负载轴上设有负载轮,所述牵引索的牵引端经所述牵引轮穿出所述机架,所述牵引索的负载端经所述负载轮穿出所述机架。
12.根据上述技术方案的一方面,所述机架的侧板上开设有一安装孔,所述安装孔设于所述牵引轴的安装位置以下,所述压力传感器设于所述安装孔内。
13.根据上述技术方案的一方面,所述动力电机设于所述机架的内侧,所述动力电机的输出轴穿出所述机架的侧板并在端部固定设有一主动轮,所述安装板远离所述绕线筒的一侧设有一连接轴,所述连接轴穿出所述机架的侧板并在端部固定设有一从动轮,所述从动轮与所述主动轮之间通过传动件连接。
14.本发明的另一方面在于提供一种电助力牵引装置的控制方法,用于控制上述技术方案中所述的电助力牵引装置,所述方法包括:通过压力传感器获取牵引轴在受到牵引索抵压时的压力数据;所述压力传感器将所述压力数据发送至控制器;所述控制器根据所述压力数据调整所述动力电机的工作参数以改变对所述牵引索的牵引助力。
15.根据上述技术方案的一方面,在所述动力电机的助力作用下,忽略所述绕线筒、所述负载轴与所述牵引轴转动连接位置的摩擦阻力,所述牵引索负载端拉力fi和牵引端拉力fo之间的的关系表示为:m/r = t * fifo= fi m/r = (1 t) * fi = k * fi式中,m为动力电机经过传动总成传递到绕线筒上的助力力矩,r为绕线筒半径,即
绕线筒对牵引索的牵引力为m/r,t为绕线筒对牵引索助力与牵引索牵引端拉力的比例系数,k为综合助力倍数,在牵引索牵引端施加fi大小的拉力时,在牵引索负载端获得k倍于fi大小的牵引力。
16.根据上述技术方案的一方面,当所述牵引索处于张紧状态时,所述牵引索被压置于所述绕线筒表面的绕线槽内,所述牵引索与所述绕线筒通过静摩擦作用保证二者不发生相对滑动;所述牵引索在所述绕线筒表面的盘绕角度θ与二者的摩擦系数μ之间的关系为:θ > (ln(fo/fi))/μ。
17.本发明的附加方面与优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
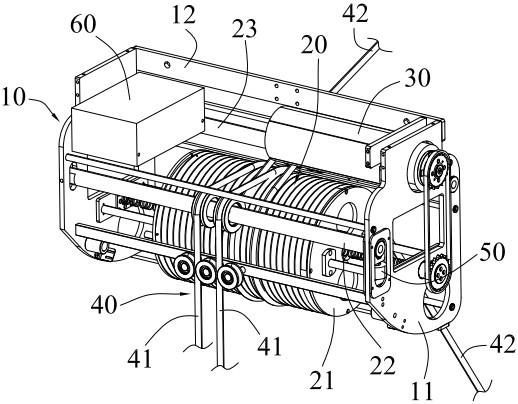
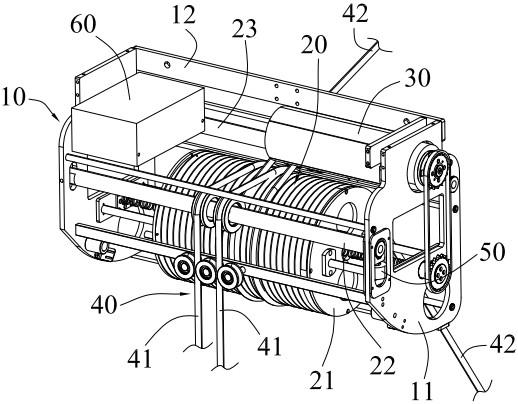
18.本发明的上述与/或附加的方面与优点从结合下面附图对实施例的描述中将变得明显与容易理解,其中:图1为本发明一实施例当中所示电助力牵引装置的结构示意图;图2为本发明一实施例当中所示电助力牵引装置隐去部分结构的结构示意图;图3图2中a部结构的放大示意图;图4为本发明一实施例当中所示电助力牵引装置隐去部分结构的结构示意图;图5为本发明一实施例当中所示电助力牵引装置的另一结构示意图;图6为本发明一实施例当中所示牵引索的受力分析图;附图元器件符号说明:机架10、侧板11、连接件12、牵引机构20、绕线筒21、绕线槽210、牵引轴22、牵引轮220、负载轴23、安装板24、中轴丝杆25、光轴滑轨26、动力电机30、牵引索40、牵引端41、负载端42、压力传感器50、测量端51、安装孔52、控制器60、主动轮70、从动轮71、传动带72。
具体实施方式
19.为使本发明的目的、特征与优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。附图中给出了本发明的若干实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
20.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”、“上”、“下”以及类似的表述只是为了说明的目的,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造与操作,因此不能理解为对本发明的限制。
21.在本发明中,除非另有明确的规定与限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发
明中的具体含义。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的与所有的组合。
22.请参阅图1
‑
5,本发明的第一实施例提供了一种电助力牵引装置,装置包括:用于承载其它部件的机架10、牵引机构20、动力电机30、牵引索40以及压力传感器50。
23.具体而言,机架10整体呈u形设置,包括两侧板11及连接于侧板11之间的连接件12,通过两侧板11与连接件12的组装得到上述机架10,以作为本实施例当中其它一些机构的载体。
24.牵引机构20包括绕线筒21及设于绕线筒21外围的牵引轴22与负载轴23,绕线筒21用于缠绕牵引索40并为牵引索40提供助力,绕线筒21、牵引轴22与负载轴23分别活动连接于机架10上,即绕线筒21、牵引轴22以及负载轴23均能绕自身轴心转动,以形成滑轮组合并具有改变力的大小与方向的效果。
25.动力电机30设于机架10上,与绕线筒21传动连接以为绕线筒21提供牵引助力;当动力电机30转动时,动力电机30输出的扭矩将通过动力电机30与绕线筒21之间的传动总成传递至绕线筒21,从而使得绕线筒21绕自身轴心转动。
26.牵引索40至少缠绕绕线筒21一圈,从而使得绕线筒21转动时能够为牵引索40提供牵引助力,并且牵引索40的牵引端41穿出牵引轴22,牵引索40的负载端42穿出负载轴23,具体而言,牵引索40的牵引端41即施力端,牵引索40的负载端42为受力端。
27.压力传感器50设于机架10上与牵引索40的牵引力方向相同的一侧,压力传感器50的测量端51与牵引轴22的表面接触,以获取牵引轴22受压时的压力数据。
28.其中,压力传感器50将压力数据发送至控制器60,控制器60根据压力数据调整动力电机30的工作参数以改变对牵引索40的牵引助力。
29.当使用现有的牵引装置对运动训练进行辅助时,若一质量为50kg的运动员a手持牵引索40的负载端42,则至少需要一教练b手持牵引索40的牵引端41并至少提供50kg的拉力才能够将运动员a提升至一定高度。
30.而采用本实施例当中所示的电助力牵引装置对运动训练进行辅助时,当运动员a手持牵引索40的负载端42、教练b手持牵引索40的牵引端41时,在重力作用下,牵引索40处于张紧状态,并且张紧的牵引索40将同时向牵引轴22、绕线轴以及负载轴23施加共计50kg的重力,此时压力传感器50的测量端51将感应到分布于牵引轴22上的重力,为了对牵引索40进行助力,压力传感器50发送压力数据至控制器60,控制器60经过分析计算得到需要助力的大小,从而控制动力电机30向与牵引力方向相同的方向转动,动力电机30输出扭矩并通过传动总成控制绕线筒21的转动,绕线筒21逐渐将牵引索40收卷,从而使得教练b对运动员a的牵引能够省心省力,达到事半功倍的效果。
31.与现有技术相比,本实施例当中所示的电助力牵引装置的有益效果在于:通过压力传感器50能够获取牵引索40张紧时施加于牵引轴22上的压力数据,压力传感器50将压力数据发送给控制器60,控制器60能够对应控制动力电机30转动以输出扭矩,从而为牵引索40提供牵引助力,便于女性教练、年龄稍大教练使用该装置为运动员训练提供辅助。
32.请再次参阅图1
‑
5,本发明的第二实施例提供了一种电助力牵引装置,本实施例所示的电助力牵引装置与第一实施例当中所示的电助力牵引装置结构基本相同,不同之处在于:
在本实施例当中,为了避免绕线筒21相对于中轴丝杆25转动、移动时产生对牵引索40的剪切力,牵引机构20还包括分别设于绕线筒21两端的安装板24,绕线筒21内穿设有一中轴丝杆25,中轴丝杆25的两端分别固定连接于安装板24,也即动力电机30通过传动总成驱动绕线筒21转动时,绕线筒21相对于中轴丝杆25是可以转动的,安装板24远离绕线筒21的一端转动连接于机架10,其中一安装板24与动力电机30传动连接,如图所示,右侧的安装板24与动力电机30传动连接。
33.其中,绕线筒21的圆周表面设有螺旋形的绕线槽210,牵引索40缠绕于绕线槽210内,并且绕线槽210与中轴丝杆25的螺距相等。
34.在牵引时,动力电机30将驱动绕线筒21转动,在绕线筒21转动的过程中,牵引索40将逐渐被缠绕于绕线筒21自身的绕线槽210内,因此,在绕线筒21内穿设一条中轴丝杆25并配合拨块使用,绕线筒21能够相对于中轴丝杆25转动并且移动,从而使得牵引索40始终缠绕绕线筒21预设圈数(如一圈),即绕线筒21转动时能够在机架10的两侧板11之间往复移动,牵引索40仅仅是缠绕在绕线筒21上的缠绕位置发生改变,而缠绕圈数不变,从而避免牵引索40被导入绕线筒21相互远离的两侧绕线槽210内以产生对牵引索40的剪切力。
35.并且为了保证绕线筒21沿中轴丝杆25移动时具有较好的稳定性,绕线筒21内穿设有至少两条光轴滑轨26,光轴滑轨26的两端分别固定连接于安装板24上,并且两条光轴滑轨26分别设于中轴丝杆25的两侧;在绕线筒21相对于中轴丝杆25转动及移动的过程中,绕线筒21沿光轴滑轨26滑动。
36.为了使得牵引过程更为省力,在一些实施例当中,牵引轴22上设有牵引轮220,负载轴23上设有负载轮,牵引索40的牵引端41经牵引轮220穿出机架10,牵引索40的负载端42经负载轮穿出机架10。
37.具体而言,牵引索40的牵引端41在本实施例当中并不缠绕牵引轮220,仅仅是通过牵引轮220起到改变拉力方向的作用,同样的,牵引索40的负载端42也不缠绕负载轮,仅仅是通过负载轮起到改变负载力方向的作用。
38.当然,在其它实施例当中,牵引索40的牵引端41也可以缠绕牵引轮220设置,牵引索40的负载端42同样可以缠绕负载轮设置,当牵引索40的两端分别缠绕牵引轮220与负载轮时,牵引索40在拉伸过程受到的摩擦阻力也相应变大,从而会减小牵引助力。
39.在本实施例当中,为了便于压力传感器50更为精准的获取牵引轴22受压时的压力数据,机架10的侧板11上开设有一安装孔52,安装孔52设于牵引轴22的安装位置以下,并且安装孔52与侧板11上用于安装牵引轴22的轴孔相通,压力传感器50设于安装孔52内,并且压力传感器50的测量端51伸入上述轴孔内,从而使得压力传感器50能够获取到牵引轴22受压时的压力数据。
40.在实际使用过程中,牵引轴22只要一端相对于机架10是活动的,即可通过压力传感器50获取该牵引轴22受压时的压力数据,牵引轴22的另外一端可以通过铰接的方式固定在机架10的另一侧。
41.在本实施例中,动力电机30设于机架10的内侧,也即动力电机30是设于机架10的侧板11之上,其可以通过法兰盘等连接方式固定。动力电机30的输出轴穿出机架10的侧板11并在端部固定设有一主动轮70,安装板24远离绕线筒21的一侧设有一连接轴,连接轴穿出机架10的侧板11并在端部固定设有一从动轮71,从动轮71与主动轮70之间通过传动件连
接。
42.其中,上述传动带72指链条或皮带中的一种,当传动带72为皮带时,主动轮70与从动轮71均为与皮带对应的皮带轮,从而保证传动带72与主动轮70、从动轮71之间的连接稳定性。
43.采用本实施例所示的电助力牵引装置,当动力电机30由控制器60控制通电转动后,通过电机轴输出扭矩,逐渐经过传动总成传递至绕线筒21,使得绕线筒21相对于中轴丝杆25转动与移动,并且绕线筒21的转动能将牵引索40缠绕于自声的绕线槽210内,从而为牵引索40以及负载于牵引索40上的载体提供较为明显的牵引助力,在辅助运动训练时能够广泛使用。
44.本发明的第三实施例提供了一种电助力牵引装置的控制方法,用于控制上述实施例中电助力牵引装置,方法包括:通过压力传感器获取牵引轴在受到牵引索抵压时的压力数据;压力传感器将压力数据发送至控制器;控制器根据压力数据调整动力电机的工作参数以改变对牵引索的牵引助力。
45.在本实施例当中,在动力电机的助力作用下,忽略绕线筒、负载轴与牵引轴转动连接位置的摩擦阻力,牵引索负载端拉力fi和牵引端拉力fo之间的的关系表示为:接位置的摩擦阻力,牵引索负载端拉力fi和牵引端拉力fo之间的的关系表示为:式中,m为动力电机经过传动总成传递到绕线筒上的助力力矩,r为绕线筒半径,即绕线筒对牵引索的牵引力为m/r,t为绕线筒对牵引索助力与牵引索牵引端拉力的比例系数,k为综合助力倍数,在牵引索牵引端施加fi大小的拉力时,在牵引索负载端获得k倍于fi大小的牵引力。
46.当两个接触物体作相对运动或有相对运动趋势时,它们之间有摩擦系数μ。如图6所示,牵引索的绕线角度为θ,则该牵引索受4个作用力,分别为张力t(dθ)、t(θ dθ)、法向力dn与摩擦力μdn,4个力的合力为0,其切向分量和法向分量方程:切向分量方程:法向分量方程:因为θ很小,其中:因此,上式可改写为:即得,设绕线筒上a、b两点对应的θ为θa和θb,对上式积分:
得即:,t
b
为牵引索牵引端拉力,t
a
为牵引索负载端拉力;即:,因此可得。
47.在本实施例当中,当牵引索处于张紧状态时,牵引索被压置于绕线筒表面的绕线槽内,牵引索与绕线筒通过静摩擦作用保证二者不发生相对滑动;牵引索在绕线筒表面的盘绕角度θ与二者的摩擦系数μ之间的关系为:。
48.其中,动力电机的控制使用了磁场方向控制foc算法,磁场方向控制算法foc的主要任务是获取用户定义的电压uq,并连续通过读取电机转子a的位置,计算适当的相电压ua、ub和uc。控制器的输入变量lq_ref和ld_ref经过pid控制器进行反馈调节,调节过程涉及park变换和clark变换。最后通过svpwm模块作用到三相逆变器上进而控制电机。
49.其中,控制器采用stm32系列单片机,主频达到72mhz,stm32型控制器有三级流水线,指令周期不固定,arm官方表明指令执行速度平均为1.25mips/mhz。stm32采用spi协议与压力传感器通信,spi是串行外设接口,是一种高速的,全双工,同步的通信总线。spi的速率主要受cpu处理spi数据能力的影响,在该系统中,stm32采样压力传感器后只需做简单的算术运算即可输出至电机驱动器,压力采样和电机控制更新速率可满足大于1khz的要求。
50.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
51.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体与详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形与改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。