一种scara机器人的增速机构及具有该增速机构的scara机器人
技术领域
1.本发明涉及工业机器人技术领域,尤其是涉及一种scara机器人的增速机构及具有该增速机构的scara机器人。
背景技术:
2.随着科技的发展,工业自动化迫切需要大量合适的装配机器人来提高生产效率及质量,从而降低生产成本,减少资源消耗。
3.scara(selective compliance assembly robot arm,选择顺应性装配机器手臂)机器人是一种应用于装配作业的机器人,具有三个旋转关节,适用于平面定位。
4.本技术人发现现有技术至少存在以下技术问题:传统的scara机器人通过电机、传动组件、减速机的配合,使转动臂上的转轴转动,转动臂在旋转的过程中,速度较慢,由此导致scara机械手臂的工作效率较低。
技术实现要素:
5.本发明的目的在于提供一种scara机器人的增速机构及具有该增速机构的scara机器人,以解决现有技术中存在的传统的scara机器人通过电机、传动组件、减速机的配合,使转动臂上的转轴转动,转动臂在旋转的过程中,速度较慢,由此导致scara机械手臂的工作效率较低的技术问题。本发明提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
6.为实现上述目的,本发明提供了以下技术方案:本发明提供的一种scara机器人的增速机构,包括:第一动力装置;旋转主体,与底座连接,所述旋转主体的内部设置有第一减速机和第二减速机;传动单元,包括第一传动组件和第二传动组件;齿轮传动组件,包括依次传动连接的动力齿轮、第一传动齿轮和第二传动齿轮,其中,所述动力齿轮与所述第一动力装置连接;所述第一传动齿轮通过第一传动组件连接所述第一减速机,所述第一减速机连接第一传动轴,用于带动所述旋转主体运动;所述第二传动齿轮通过第二传动组件连接所述第二减速机,所述第二减速机连接第二传动轴,用于带动第一转动臂转动。
7.优选地,所述第一传动组件包括第一同步带轮、第二同步带轮以及连接于所述第一同步带轮与所述第二同步带轮上的第一同步带,其中:所述第一同步带轮连接所述第一传动齿轮的齿轮轴,所述第二同步带轮连接所述第一减速机。
8.优选地,所述的第二传动组件包括第三同步带轮、第四同步带轮以及连接于所述第三同步带轮和所述第四同步带轮上的第二同步带,其中:
所述第三同步带轮连接所述第二传动齿轮的齿轮轴,所述第四同步带轮连接所述第二减速机。
9.优选地,所述第一传动齿轮和第二传动齿轮的齿数比、所述第一减速机与所述第二减速机的减速比均设置为1:1。
10.一种具有增速机构的scara机器人,包括上述的scara机器人的增速机构。
11.优选地,还包括第一转动臂、第二转动臂以及执行机构,所述传动单元还包括第三传动组件,其中:所述第一转动臂包括所述第二传动轴,所述第二传动轴与所述第二减速机连接;所述第二转动臂包括第三传动轴,所述第三传动轴与所述第二传动轴通过所述第三传动组件传动连接;所述执行机构设置于所述第二转动臂上,包括花键轴以及与花键轴配合的花键螺母。
12.优选地,所述第三传动组件包括第五同步带轮、第六同步带轮以及连接于所述第五同步带轮和所述第六同步带轮上的第三同步带,其中:所述第五同步带轮连接所述第二传动轴,所述第六同步带轮连接所述第三传动轴。
13.优选地,还包括第二动力装置和第三动力装置,所述传动单元还包括第四传动组件和第五传动组件,其中:所述第二动力装置位于所述第一转动臂内,所述第二动力装置通过第四传动组件与所述花键轴连接,用于实现所述执行机构在垂直方向运动;所述第三动力装置位于所述第二转动臂内,所述第三动力装置通过第五传动组件与所述花键螺母连接,用于实现所述执行机构的转动。
14.优选地,所述第四传动组件包括第一传动机构和第二传动机构,其中:所述第一传动机构设置为包括第七同步带轮、第八同步带轮以及连接于所述第七同步带轮和所述第八同步带轮上的第四同步带,所述第七同步带轮与所述第二动力装置连接,所述第八同步带轮与所述第三传动轴连接;所述第二传动机构设置为包括第九同步带轮、第十同步带轮以及连接于所述第九同步带轮和所述第十同步带轮上的第五同步带,所述第九同步带轮与所述第三传动轴连接,所述第十同步带轮与所述花键螺母连接。
15.优选地,所述第五传动组件包括第十一同步带轮、第十二同步带轮以及连接于所述第十一同步带轮和所述第十二同步带轮上的第六同步带,其中:所述第十一同步带轮与所述第三动力装置连接,所述第十二同步带轮与所述花键轴连接。
16.本发明提供的一种scara机器人的增速机构及具有该增速机构的scara机器人,通过设置动力齿轮、第一传动齿轮和第二传动齿轮依次啮合传动连接,第一传动齿轮、第二传动齿轮分别通过第一传动组件和第二传动组件连接第一减速机和第二减速机,并且底座固定不动,使用时,通过此增速机构,第一传动齿轮与第二传动齿轮的转动角度在第二传动轴上产生叠加,即scara机器人的电机转动圈数不变,第二传动轴的转动角度为原来的两倍,以实现在不增加电机转数的前提下,通过此增速机构增速,相比于传统的结构,可使scara
机器人的转动速度更快。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
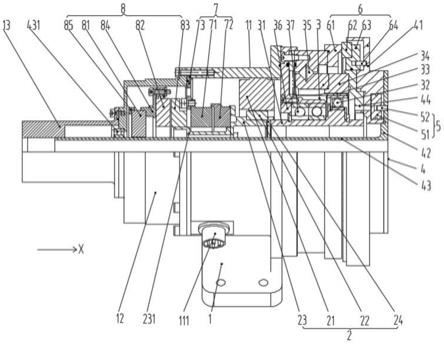
18.图1是本发明scara机器人的增速机构的结构示意图;图2是图1中旋转主体内部的结构示意图;图3是本发明具有增速机构的scara机器人的结构示意图;图4是图3的内部传动结构示意图。
19.图中:1、第一转动臂;2、第二转动臂;3、底座;4、执行机构;5、增速机构;6、第一减速机;7、第二减速机;8、第二动力装置;9、第三动力装置;10、第一传动组件;11、第二传动轴;20、第二传动组件;21、第三传动轴;30、第三传动组件;41、花键轴;42、花键螺母;50、第五传动组件;51、第一动力装置;52、旋转主体;53、齿轮传动组件;101、第一同步带轮;102、第二同步带轮;103、第一同步带;201、第三同步带轮;202、第四同步带轮;203、第二同步带;301、第五同步带轮;302、第六同步带轮;303、第三同步带;401、第一传动机构;402、第二传动机构;501、第十一同步带轮;502、第十二同步带轮;503、第六同步带;521、第一传动轴;531、第一传动齿轮;532、第二传动齿轮;533、动力齿轮;4011、第七同步带轮;4012、第八同步带轮;4013、第四同步带;4021、第九同步带轮;4022、第十同步带轮;4023、第五同步带。
具体实施方式
20.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
21.本发明提供了一种scara机器人的增速机构,图1是本实施例的结构示意图,如图1所示,增速机构5包括第一动力装置51、旋转主体52、传动单元以及齿轮传动组件53。
22.其中,图2是本实施例中旋转主体内部的结构示意图,如图2所示,旋转主体52与底座3连接,旋转主体52的内部设置有第一减速机6和第二减速机7;传动单元,包括第一传动组件10和第二传动组件20;齿轮传动组件53,包括依次传动连接的动力齿轮533、第一传动齿轮531和第二传动齿轮532,其中,动力齿轮533与第一动力装置51连接;第一传动齿轮531通过第一传动组件10连接第一减速机6,第一减速机6连接第一传动轴521,用于带动旋转主体52运动;第二传动齿轮532通过第二传动组件20连接第二减速机7,第二减速机7连接第二传动轴11,用于带动第一转动臂1转动。
23.通过设置动力齿轮533、第一传动齿轮531和第二传动齿轮532依次传动连接,由于第一传动齿轮531和第二传动齿轮532啮合,所以第一传动齿轮531和第二传动齿轮532的转动方向相反,又第一传动齿轮531、第二传动齿轮532分别通过第一传动组件10和第二传动
组件20连接第一减速机6和第二减速机7,并且底座3固定不动,即相对于底座3,旋转主体52的转动方向与第二传动齿轮532的转动方向相同。由此,通过第一传动齿轮531与第二传动齿轮532的转动角度在第二传动轴11上产生叠加,即电机转动圈数不变,第二传动轴11的转动角度为原来的两倍,以实现在不增加电机转数的前提下,通过此增速机构增速,相比于传统的结构,可使scara机器人的转动速度更快。
24.作为可选地实施方式,第一传动组件10包括第一同步带轮101、第二同步带轮102以及连接于第一同步带轮101与第二同步带轮102上的第一同步带103。
25.其中,第一同步带轮101连接第一传动齿轮531的齿轮轴,第二同步带轮102连接第一减速机6。
26.作为可选地实施方式,第二传动组件20包括第三同步带轮201、第四同步带轮202以及连接于第三同步带轮201和第四同步带轮202上的第二同步带203。其中,第三同步带轮201连接第二传动齿轮532的齿轮轴,第四同步带轮202连接所第二减速机7。
27.作为可选地实施方式,第一传动齿轮531和第二传动齿轮532的齿数比、第一减速机6与第二减速机7的减速比均设置为1:1。在实际的使用时,也可以根据使用需要设置为其他的齿数比和减速比,以满足不同的使用需求。
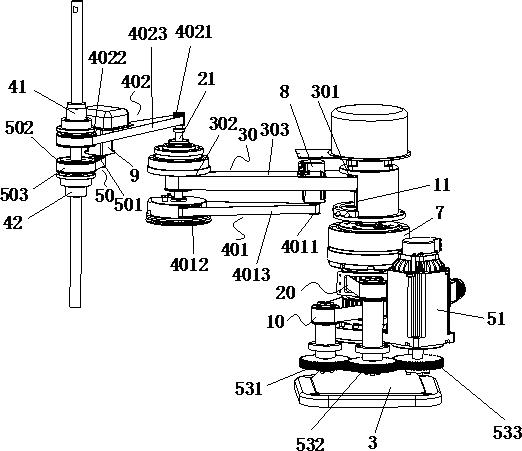
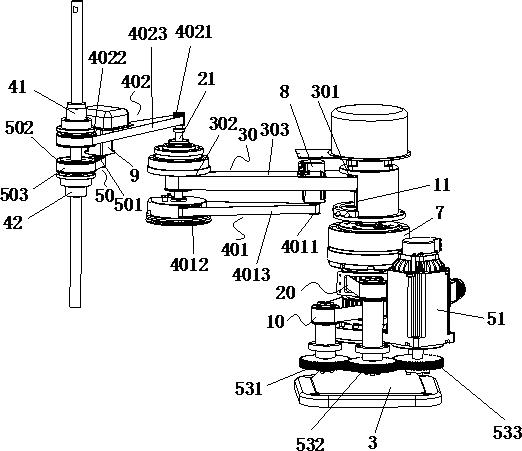
28.一种具有增速机构的scara机器人,图3是本实施例的结构示意图,如图3所示,包括上述的scara机器人的增速机构5,还包括第一转动臂1、第二转动臂2以及执行机构4,传动单元还包括第三传动组件30。
29.其中,图4是本实施例的传动结构示意图,如图4所示,第一转动臂1包括所述第二传动轴11,第二传动轴11与第二减速机7连接;第二转动臂2包括第三传动轴21,第三传动轴21与第二传动轴11通过第三传动组件30传动连接;执行机构4设置于第二转动臂2上,包括花键轴41以及与花键轴41配合的花键螺母42。
30.作为可选地实施方式,第三传动组件30包括第五同步带轮301、第六同步带轮302以及连接于第五同步带轮301和第六同步带轮302上的第三同步带303。其中,第五同步带轮301连接第二传动轴11,第六同步带轮302连接第三传动轴21。
31.作为可选地实施方式,还包括第二动力装置8和第三动力装置9,传动单元还包括第四传动组件和第五传动组件50。
32.其中,第二动力装置8位于第一转动臂1内,第二动力装置8通过第四传动组件与花键轴41连接,用于实现执行机构4在垂直方向运动;具体地,第四传动组件包括第一传动机构401和第二传动机构402,通过第一传动机构401和第二传动机构402的配合,实现执行机构4在垂直方向运动。
33.其中,第一传动机构401设置为包括第七同步带轮4011、第八同步带轮4012以及连接于第七同步带轮4011和第八同步带轮4012上的第四同步带4013,第七同步带轮4011与第二动力装置8连接,第八同步带轮4012与第三传动轴21连接;第二传动机构402设置为包括第九同步带轮4021、第十同步带轮4022以及连接于第九同步带轮4021和第十同步带轮4022上的第五同步带4023,第九同步带轮4021与第三传动轴21连接,第十同步带轮4022与花键螺母42连接。
34.第三动力装置9位于第二转动臂2内,第三动力装置9通过第五传动组件50与花键螺母42连接,用于实现执行机构4的转动。
35.具体地,第五传动组件50包括第十一同步带轮501、第十二同步带轮502以及连接于第十一同步带轮501和第十二同步带轮502上的第六同步带503。
36.其中,第十一同步带轮501与第三动力装置9连接,第十二同步带轮502与花键轴41连接。
37.通过设置第二动力装置8和第三动力装置9分别设置在第二转动臂2和第一转动臂1上,将动力装置的重力分散,与现有的scara机器人结构相比,大幅度降低了第二转动臂2的转动惯量,配合增速机构的使用,可大幅度提升转速,从而提高scara机器人的工作效率。
38.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。