1.本发明属于仿生机器人技术领域,具体涉及一种气囊驱动的三自由度仿生眼,同时还涉及该气囊驱动的三自由度仿生眼的方法。
背景技术:
2.近年来,仿生学发展迅速,其中视觉仿生更是成为前沿交叉学科的研究热点,涉及神经生理学、仿生学、控制科学和计算机科学等。视觉仿生的主要应用为仿生眼,它是模拟生物眼睛系统的原理来构建人工视觉系统,使其具有类似于生物系统眼睛的特征或功能。因为人类的眼睛是最高级的,也是研究最透彻的,故仿生眼主要是模拟人眼。
3.人类感知客观世界有80%以上的信息是通过眼睛获取,对于机器人来说,“眼睛”也是准确获取与理解外界环境信息的关键部件。随着机器人应用领域的扩大,一些特种机器人已经走进我们生活,例如无人机、地面移动机器人、水下机器人等。为了扩大监测视场,机器人上多安装多自由度仿生眼。然而,机器人在复杂的环境下作业时,易受到自身姿态变化、跟踪目标位置变化以及外界环境变化等因素影响,进而导致监控目标丢失等。另外,由于机器人振动、摇晃会出现图像跳动、偏转等问题,增加了图像处理以及机器人任务规划与操作等方面的难度。目前的仿生眼大多为结构复杂、体积大、重量大、噪音大,所以应用场景受限。
技术实现要素:
4.为了解决仿生眼在实际使用时遇到的一系列问题,本发明提供了一种具备三自由度调节、结构紧凑、运动灵活、噪音低、重量小、结构简单便于装配、控制方便、驱动方式稳定可靠的气囊驱动的三自由度仿生眼,同时提供了相应的方法。
5.基于上述目的,本发明通过如下技术方案实现:一种气囊驱动的三自由度仿生眼,包括半球型仿生眼,半球型仿生眼上设有三自由度驱动机构,三自由度驱动机构包括平台固定底板,平台固定底板上设有相互配合的线性驱动结构和柔性驱动结构,线性驱动结构、柔性驱动结构均与半球型仿生眼相连接。
6.优选地,半球型仿生眼包括半球型仿生壳体,半球型仿生壳体球面侧的端部设有图像采集器,半球型仿生壳体平面侧设有仿生底壳体,仿生底壳体靠近半球型仿生壳体的一侧设有壳体滑槽;半球型仿生壳体内侧端部均布有至少两个壳体凸起,壳体凸起均与壳体滑槽相配合。
7.优选地,线性驱动结构包括三组间隙配合的线性气囊驱动器;线性气囊驱动器包括与仿生底壳体相连接的球铰连杆,球铰连杆的端部设有与平台固定底板相连接的线性伸缩气囊,线性伸缩气囊上套设有气囊支撑架;气囊支撑架的一端与球铰连杆间隙配合,另一端与平台固定底板相连接;线性伸缩气囊上设有线性气管,气管上设有控制气阀。
8.优选地,柔性驱动结构包括两组间隙配合的柔性气囊驱动器;柔性气囊驱动器包括设置在平台固定底板上的柔性伸缩气囊,柔性伸缩气囊远离平台固定底板的一端设有柔
性绳索,柔性伸缩气囊上套设有气囊支撑架;柔性绳索均通过设置在仿生底壳体上的柔性绳连接环与设置在半球型仿生壳体上的柔性绳固定环相连接;柔性伸缩气囊上套设有气囊支撑架;气囊支撑架的一端与柔性绳索间隙配合,另一端与平台固定底板相连接;柔性伸缩气囊上设有气管,气管上设有控制气阀;线性伸缩气囊、柔性伸缩气囊均包括多个间隙配合的可折叠环形气囊圈,可折叠环形气囊圈通过气囊连接环相连接,气囊连接环间通过气囊伸缩弹簧相连接。
9.优选地,仿生底壳体上设有调节弹簧,调节弹簧活动端的一端与仿生底壳体相连接,调节弹簧活动端的另一端与设置在半球型仿生壳体内的固定凸块相连接;柔性绳连接环之间、柔性绳固定环之间、柔性伸缩气囊之间均相对于仿生底壳体中心对称;柔性伸缩气囊均与线性伸缩气囊间隙配合。
10.优选地,球铰连杆的端部设有球铰头,球铰头与设置在仿生底壳体侧面上的球铰底座相配合。
11.优选地,线性伸缩气囊之间的夹角均呈120
°
;线性伸缩气囊相对平台固定底板中心呈环形分布。
12.优选地,气囊支撑架包括与可伸缩气囊间隙配合的气囊支撑环,气囊支撑环靠近平台固定底板的一侧均布有多个与平台固定底板相连接的支撑环连杆。
13.优选地,图像采集器的光轴通过半球型仿生壳体的球心;图像采集器上设有图像传感器,图像传感器通过图像传输线连接有图像分析处理器。
14.一种气囊驱动的三自由度仿生眼的方法,步骤包括:步骤一,图像信息采集在半球型仿生眼上设置图像采集器,图像采集器上设置的图像传感器获取图像信息,获取的图像信息通过图像传输线传送至图像分析处理器;步骤二,图像信息分析处理图像分析处理器对步骤一中获取的图像信息进行分析处理,判断是否存在目标物体;在进行目标物体判断时,通过预训练置入的方式或者通过手动选择添加的方式,将目标物体的特征信息置入到图像分析处理器内,便于图像分析处理器进行准确的目标物检测判断;步骤三,仿生眼的三自由度调节当步骤二判断存在目标物体时,则由图像分析处理器控制线性气囊驱动器、柔性气囊驱动器对半球型仿生眼进行调节,使图像采集器的光轴正对目标物体的几何中心;步骤四,重复步骤一至步骤三,使半球型仿生眼始终处于不断获取图像信息和控制半球型仿生眼运动的状态,同时图像采集器的光轴始终正对目标物体进行图像信息采集;其中,步骤三中由图像分析处理器发出控制信号至线性气囊驱动器、柔性气囊驱动器,通过对各个控制气阀进行控制,使气囊支撑架上的线性伸缩气囊、柔性伸缩气囊分别进行充放气动作,驱动半球型仿生眼进行三自由度运动,从而使图像采集器的光轴始终正对目标物体的几何中心;图像分析处理器根据图像传感器的图像像素坐标系上目标物体与图像几何中心的偏差值,将偏差值转换成物理坐标系上的实际偏差值,从而对半球型仿生眼的位姿变换进行确定,通过坐标转换等将位姿变换转换成线性气囊驱动器、柔性气囊驱
动器的调节变量,将调节变量转换到各个控制气阀的控制量中,进而对控制气阀的充放气量进行确定。
15.与现有技术相比,本发明的有益效果如下:(1)本发明通过在平台固定底板上设置三组间隙配合的线性气囊驱动器对半球型仿生眼的z轴方向进行位置调节,通过对线性伸缩气囊进行充放气动作,对线性伸缩气囊的长度进行调节,经过球铰连杆端部的球铰头与球铰底座间的球铰连接,使得半球型仿生眼具备x轴和y轴方向上的二自由度运动,从而实现对半球型仿生眼x轴和y轴的二自由度的调节动作;在平台固定底板上设置两组间隙配合的柔性气囊驱动器方便半球型仿生眼绕z轴(即图像采集器的光轴)旋转,通过对柔性伸缩气囊进行充放气动作,对柔性伸缩气囊的长度进行调节,柔性绳索通过柔性绳连接环带动柔性绳固定环运动,从而使半球型仿生壳体绕仿生底壳体转动,使得半球型仿生眼具备绕z轴旋转运动的能力,配合半球型仿生眼在x轴和y轴方向上的二自由度运动,使得本发明具备三自由度方向上的运动调节能力;通过上述调节使本发明能够模仿人眼眼外肌控制眼球的三自由度运动方式,本发明结构紧凑、控制方便,且具备良好的运动灵活性,可以嵌入在各种智能采集设备上。
16.(2)半球型仿生壳体通过壳体凸起与仿生底壳体上的壳体滑槽相配合,使得半球型仿生壳体能够绕仿生底壳体旋转,方便半球型仿生眼实现绕图像采集器光照旋转的动作;图像采集器对图像进行数据采集,便于进行数据分析和半球型仿生眼的调整动作。
17.(3)利用线性伸缩气囊和气囊支撑架形成线性气囊驱动器,通过气管对各个线性伸缩气囊进行充放气调节,使得线性伸缩气囊在气囊支撑架内进行线性伸缩调节,从而实现对半球型仿生眼z轴方向的调节动作,相对于其他驱动方式,通过线性伸缩气囊驱动是利用了填充时的气体特性,利用气体填充时的稳定性和快速调节性等,使得线性气囊驱动器在运行过程更加稳定可靠、反应迅速,且能够减少对资源的损耗,增加半球型仿生眼三自由度调节的寿命。
18.(4)利用柔性伸缩气囊和气囊支撑架形成柔性气囊驱动器,通过气管对各个柔性伸缩气囊进行充放气调节,使得柔性伸缩气囊在气囊支撑架内进行伸缩调节,利用柔性伸缩气囊的伸缩性,带动柔性绳索运动,通过柔性绳连接环的导向及调整,使得柔性绳索对柔性绳固定环进行牵引,从而带动半球型仿生壳体绕仿生底壳体旋转,从而实现图像采集器绕半球型仿生壳体轴心的旋转动作;通过气体驱动线性伸缩气囊、柔性伸缩气囊的方式,能够保证机构或设备在运行过程中的稳定性等,能够保持图像采集器稳定可靠的视轴运动,从而获得稳定清晰的图像信息。
19.(5)调节弹簧的两端分别与仿生底壳体和半球型仿生壳体上的固定凸块相连接,便于转动后的半球型仿生壳体在调节弹簧的作用下复位,方便半球型仿生眼进行再次旋转,方便图像采集器实现再次绕半球型仿生壳体轴心转动动作。
20.(6)线性伸缩气囊通过球铰连杆与仿生底壳体侧面连接,通过球铰连杆上的球铰头与仿生底壳体侧面上的球铰底座连接,利用球铰结构来连接线性伸缩气囊和仿生底壳体,不仅降低了连接处的摩檫力损失,还增加了半球型仿生眼的运动灵活度,方便半球型仿生眼上的图像采集器对图像进行追踪采集及处理。
21.(7)线性伸缩气囊之间的夹角均呈120
°
,方便各个线性伸缩气囊进行配合,方便通过对各个气管上控制气阀流量的控制,便于实现对半球型仿生眼上图像采集器的光轴的调
节;通过图像分析处理器对采集到的图像进行分析处理,能够根据采集图像得到的图像数据及时调整各个线性伸缩气囊、柔性伸缩气囊的充放气量,实现对线性气囊驱动器、柔性气囊驱动器的调节,最终实现对图像的持续采集动作。
22.综上,本发明通过气体对线性气囊驱动器、柔性气囊驱动器的驱动,使得半球型仿生眼具备三自由度运动调节能力,由于采用气体方式进行调节,采用平台固定底板进行一体化承载,使得本发明噪音低、重量小、结构简单紧凑便于装配、便携程度高等特点,大大提升了对目标图像捕捉的稳定性及灵活性;本仿生眼能够适用于防暴、安全侦查、医疗服务、生活娱乐等多个领域,具有重要的实用价值与研究价值,具有广阔的应用前景。
附图说明
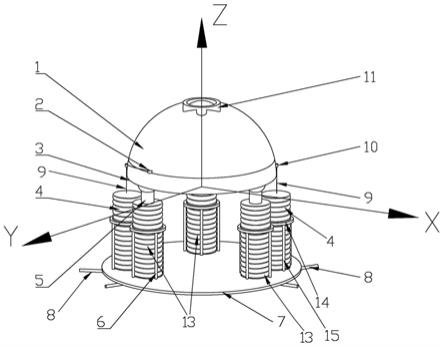
23.图1是实施例1中本发明的结构示意图;图2是实施例1中本发明的内部结构示意图。
24.图中,1、半球型仿生壳体,2、柔性绳固定环,3、仿生底壳体,4、柔性伸缩气囊,5、球铰连杆,6、气囊支撑架,7、平台固定底板,8、气管,9、柔性绳索,10、柔性绳连接环,11、图像采集器,12、调节弹簧,13、线性伸缩气囊,14、气囊支撑环,15、支撑环连杆。
具体实施方式
25.以下通过具体实施例对本发明作进一步详细说明,但并不限制本发明的范围。
26.实施例1:一种气囊驱动的三自由度仿生眼,其结构如图1
‑
图2所示,包括半球型仿生眼,半球型仿生眼上设有三自由度驱动机构,三自由度驱动机构包括平台固定底板7,平台固定底板7上设有相互配合的线性驱动结构和柔性驱动结构,线性驱动结构、柔性驱动结构均与半球型仿生眼相连接。半球型仿生眼包括半球型仿生壳体1,半球型仿生壳体1球面侧的端部设有图像采集器11,半球型仿生壳体1平面侧设有仿生底壳体3,仿生底壳体3靠近半球型仿生壳体1的一侧设有壳体滑槽;半球型仿生壳体1内侧端部均布有至少两个壳体凸起,壳体凸起均与壳体滑槽相配合。图像采集器11的光轴通过半球型仿生壳体1的球心;图像采集器11上设有图像传感器,图像传感器通过图像传输线连接有图像分析处理器。
27.线性驱动结构包括三组间隙配合的线性气囊驱动器;线性气囊驱动器包括与仿生底壳体3相连接的球铰连杆5,球铰连杆5的端部设有与平台固定底板7相连接的线性伸缩气囊13,线性伸缩气囊13上套设有气囊支撑架6;气囊支撑架6的一端与球铰连杆5间隙配合,另一端与平台固定底板7相连接;线性伸缩气囊13上设有线性气管8,气管8上设有控制气阀。线性伸缩气囊13之间的夹角均呈120
°
;线性伸缩气囊13相对平台固定底板7中心呈环形分布。球铰连杆5的端部设有球铰头,球铰头与设置在仿生底壳体3侧面上的球铰底座相配合。
28.柔性驱动结构包括两组间隙配合的柔性气囊驱动器;柔性气囊驱动器包括设置在平台固定底板7上的柔性伸缩气囊4,柔性伸缩气囊4远离平台固定底板7的一端设有柔性绳索9,柔性伸缩气囊4上套设有气囊支撑架6;柔性绳索9均通过设置在仿生底壳体3上的柔性绳连接环10与设置在半球型仿生壳体1上的柔性绳固定环2相连接;柔性伸缩气囊4上套设有气囊支撑架6;气囊支撑架6的一端与柔性绳索9间隙配合,另一端与平台固定底板7相连
接;柔性伸缩气囊4上设有气管8,气管8上设有控制气阀。仿生底壳体3上设有调节弹簧12,调节弹簧12活动端的一端与仿生底壳体3相连接,调节弹簧12活动端的另一端与设置在半球型仿生壳体1内的固定凸块相连接;柔性绳连接环10之间、柔性绳固定环2之间、柔性伸缩气囊4之间均相对于仿生底壳体3中心对称;柔性伸缩气囊4均与线性伸缩气囊13间隙配合。气囊支撑架6包括与可伸缩气囊间隙配合的气囊支撑环14,气囊支撑环14靠近平台固定底板7的一侧均布有多个与平台固定底板7相连接的支撑环连杆15。
29.一种气囊驱动的三自由度仿生眼的方法,步骤包括:步骤一,图像信息采集在半球型仿生眼上设置图像采集器11,图像采集器11上设置的图像传感器获取图像信息,获取的图像信息通过图像传输线传送至图像分析处理器;步骤二,图像信息分析处理图像分析处理器对步骤一中获取的图像信息进行分析处理,判断是否存在目标物体;在进行目标物体判断时,通过预训练置入的方式或者通过手动选择添加的方式,将目标物体的特征信息置入到图像分析处理器内,便于图像分析处理器进行准确的目标物检测判断;步骤三,仿生眼的三自由度调节当步骤二判断存在目标物体时,则由图像分析处理器控制线性气囊驱动器、柔性气囊驱动器对半球型仿生眼进行调节,使图像采集器11的光轴正对目标物体的几何中心;步骤四,重复步骤一至步骤三,使半球型仿生眼始终处于不断获取图像信息和控制半球型仿生眼运动的状态,同时图像采集器11的光轴始终正对目标物体进行图像信息采集;其中,步骤三中由图像分析处理器发出控制信号至线性气囊驱动器、柔性气囊驱动器,通过对各个控制气阀进行控制,使气囊支撑架6上的线性伸缩气囊13、柔性伸缩气囊4分别进行充放气动作,驱动半球型仿生眼进行三自由度运动,从而使图像采集器11的光轴始终正对目标物体的几何中心;图像分析处理器根据图像传感器的图像像素坐标系上目标物体与图像几何中心的偏差值,将偏差值转换成物理坐标系上的实际偏差值,从而对半球型仿生眼的位姿变换进行确定,通过坐标转换等将位姿变换转换成线性气囊驱动器、柔性气囊驱动器的调节变量,将调节变量转换到各个控制气阀的控制量中,进而对控制气阀的充放气量进行确定;其详细步骤为:通过图像采集器11不断采集图像数据,当图像数据中存在目标物时,通过图像分析处理器的预置算法确定目标物体几何中心的像素坐标系,同时判断目标物体是否存在方向偏移,并获得偏移量和像素坐标系,通过图像采集器11的标定参数,将像素坐标系的坐标进行差值转换,将差值转换为各个气管8的气体偏差量,气体偏差量通过各个气阀进行调节控制,从而实现对半球型仿生眼的运动调节,保证目标物始终处于采集图像的正中心且无方向偏移状况,以保证采集图像数据的清晰稳定。
30.调节过程中,图像分析处理器发出控制信号,通过对各个控制气阀进行控制,对三个气囊支撑架6上的线性伸缩气囊13进行充放气动作,线性伸缩气囊13在进行充气或放气过程中,线性伸缩气囊13在气囊支撑环14、支撑环连杆15内伸长或缩短,由于平台固定底板7的限制,使球铰连杆5在z轴方向上向仿生底壳体3侧靠近或远离,通过三个球铰连杆5的调节,三个球铰连杆5端部的球铰头在仿生底壳体3侧面的球铰底座上转动,通过控制三个线
性伸缩气囊13上气管8的充气或放气量,使各个球铰头在球铰底座内转动相应的角度,对图像采集器11的光轴位置进行调节,使半球型仿生眼实现x轴、y轴方向上的二自由度运动。
31.对其余两个气囊支撑架6上的柔性伸缩气囊4进行充放气动作,柔性伸缩气囊4在进行充气或放气过程中,柔性伸缩气囊4在气囊支撑环14、支撑环连杆15内伸长或缩短,由于平台固定底板7的限制,柔性伸缩气囊4的活动端带动柔性绳索9靠近或远离仿生底壳体3;在柔性伸缩气囊4远离仿生底壳体3时,柔性绳索9通过柔性绳连接环10带动柔性绳固定环2运动,柔性绳固定环2带动半球型仿生壳体1在仿生底壳体3上旋转,壳体凸起在壳体滑槽内滑动,防止半球型仿生壳体1脱离仿生底壳体3,半球型仿生壳体1旋转过程中,带动调节弹簧12产生弹性扭转作用力并进行暂储;在柔性伸缩气囊4靠近仿生底壳体3时,由于没有柔性绳索9对柔性绳固定环2的拉拽,调节弹簧12暂储的弹性扭转作用力释放,通过固定凸块带动半球型仿生壳体1反转,通过上述步骤能够实现半球型仿生壳体1绕z轴旋转,即半球型仿生眼绕图像采集器11的光轴旋转的目的;通过控制两个柔性伸缩气囊4上气管8的充气或放气量,能够控制半球型仿生壳体1在仿生底壳体3旋转的角度。
32.通过分别对各个线性伸缩气囊13、柔性伸缩气囊4的调节,使半球型仿生眼实现三自由度运动,从而使图像采集器11的光轴正对目标物体的几何中心且不会成像倾斜。
33.实施例2:一种气囊驱动的三自由度仿生眼,与实施例1的不同之处在于:气囊支撑环14与可伸缩气囊固定连接;支撑环连杆15为伸缩连杆;气囊支撑环14能够随可伸缩气囊的伸缩而运动,带动支撑环连杆15进行伸展或收缩,方便对线性伸缩气囊13、柔性伸缩气囊4进行持续固定动作。
34.实施例3:一种气囊驱动的三自由度仿生眼,与实施例1的不同之处在于:平台固定底板7远离气囊支撑架6的一侧设有与气管8间隙配合的气管凹槽。
35.以上所述仅为本发明的较佳实施例而已,但不仅限于上述实例,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。