1.本实用新型涉及叉车脚焊接加工技术领域,具体涉及叉车脚机器人焊接工作站。
背景技术:
2.焊接工作站是指使用焊接机器人对加工件进行焊接的工作站。而焊接机器人是一种多用途的、可重复编程的自动控制操作机(manipulator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊枪的,使之能进行焊接。
3.现有市场上的机器人焊接工作站在对涉及对叉车脚工件进行加工焊接时,不能批量生产同规格不同长度尺寸的产品,导致生产效率低下,因此亟需研发叉车脚机器人焊接工作站来解决上述问题。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了叉车脚机器人焊接工作站,可批量生产同规格不同长度尺寸的产品,大量减少人力的投入,同时又提高了生产效率。
5.本实用新型通过以下技术方案予以实现:
6.叉车脚机器人焊接工作站,包括:焊机电源、控制柜、变位机和焊接机器人,所述焊接机器人的前后侧对称安装有所述变位机,所述变位机的传动端可拆卸安装有工装夹具:所述工装夹具包括:传动板、定位组件一、定位组件二和定位组件三;所述传动板上从左至右依次设有所述定位组件一、所述定位组件二和所述定位组件三;
7.所述定位组件一包括:调节板、放置板一、l型板一和定位销一;所述调节板安装于所述传动板上,所述调节板的右端可调节锁紧有所述放置板一,所述放置板一的前后端对称设有所述l型板一,所述l型板一上滑动穿过有所述定位销一;
8.所述定位组件三包括:固定座、定位销二、定位盘和锁紧座;所述固定座安装于所述传动板上,所述固定座上穿过有所述定位销二,所述定位销二的前侧端套设有所述定位盘,所述定位销二的后侧端通过螺纹可拆卸锁紧有所述锁紧座。
9.优选的,所述定位组件二设置的数量至少为两组,其具体包括:放置板二、l型板二和手动压紧钳;所述放置板二的前后端对称设有所述l型板二,所述l型板二上对称安装有所述手动压紧钳。
10.优选的,所述放置板一和所述放置板二的顶部中部均设有承接板。
11.优选的,所述l型板一上、所述固定座上均插接有导向套,通过所述l型板一上的所述导向套内滑动穿过有所述定位销一,通过所述固定座上的所述导向套内滑动穿过有所述定位销二。
12.优选的,所述调节板上分别开设有若干定位螺孔一和定位螺孔二,通过所述定位螺孔一与定位螺栓一配合,将所述放置板一与所述调节板可拆卸相连,通过所述定位螺孔
二与定位螺栓二配合,对所述放置板一进行锁紧安装时进行限位。
13.优选的,所述放置板一上还包括开设的w型槽,所述w型槽的前后弧形槽口内抵接有所述定位螺栓二。
14.优选的,所述变位机包括:安装架、伺服电机、转轴和l型连接件;所述安装架的左侧壁上安装有所述伺服电机、右侧壁上转动安装有所述转轴,所述伺服电机的输出端、所述转轴的端部均设有所述l型连接件,所述l型连接件上可拆卸锁紧有所述传动板。
15.优选的,所述控制柜分别与所述焊机电源、所述变位机和所述焊接机器人电性相连。
16.本实用新型的有益效果为:
17.本实用新型在采用上述结构的设计和使用下,可批量生产同规格不同长度尺寸的产品,大量减少人力的投入,同时又提高了生产效率;
18.而且本实用新型结构新颖、设计合理,操作简便灵活,具有较强的实用性。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
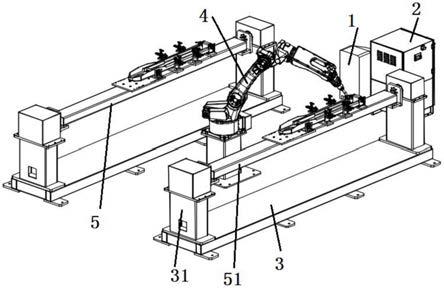
20.图1是本实用新型的结构立体图;
21.图2是本实用新型中变位机的结构正视图;
22.图3是本实用新型中变位机的结构立体图;
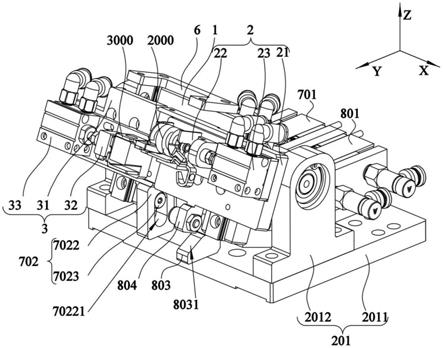
23.图4是本实用新型中工装夹具的结构图;
24.图5是本实用新型中叉车脚的结构图;
25.图6是本实用新型中定位组件一的结构图;
26.图7是本实用新型中定位组件二的结构图;
27.图8是本实用新型中定位组件三的结构图。
28.图中:1
‑
焊机电源、2
‑
控制柜、3
‑
变位机、31
‑
安装架、32
‑
伺服电机、33
‑
转轴、34
‑
l型连接件、4
‑
焊接机器人、5
‑
工装夹具、51
‑
传动板、52
‑
定位组件一、521
‑
调节板、522
‑
放置板一、523
‑
l型板一、524
‑
定位销一、53
‑
定位组件二、531
‑
放置板二、532
‑
l型板二、533
‑
手动压紧钳、534
‑
承接板、54
‑
定位组件三、541
‑
固定座、542
‑
定位销二、543
‑
定位盘、544
‑
锁紧座、545
‑
导向套、6
‑
定位螺孔一、7
‑
定位螺孔二、8
‑
定位螺栓二、9
‑
w型槽、10
‑
叉车脚、101
‑
头端部、102
‑
尾端部、103
‑
加强部、104
‑
穿孔。
具体实施方式
29.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.请参阅图1~8所示,本实用新型的实施例具体公开提供了叉车脚机器人焊接工作站的技术方案,包括:焊机电源1、控制柜2、变位机3和焊接机器人4,焊接机器人4的前后侧对称安装有变位机3,变位机3的传动端可拆卸安装有工装夹具5:工装夹具5包括:传动板51、定位组件一52、定位组件二53和定位组件三54;传动板51上从左至右依次设有定位组件一52、定位组件二53和定位组件三54;通过上述定位组件一52、定位组件二53和定位组件三54可将叉车脚10的各待焊接部件进行工装固定,方便焊接机器人4进行焊接。
31.上述的叉车脚10由头端部101、尾端部102和加强部103具体构成;定位组件一52、定位组件二53将尾端部102锁紧固定、定位组件三54将头端部101锁紧固定。
32.定位组件一52包括:调节板521、放置板一522、l型板一523和定位销一524;调节板521安装于传动板51上,调节板521的右端可调节锁紧有放置板一522,放置板一522的前后端对称设有l型板一523,l型板一523上滑动穿过有定位销一524;通过将定位销一524穿过尾端部102、加强部103上开设的穿孔104,将上述叉车脚10的尾端部102、加强部103进行限位定位;
33.定位组件三54包括:固定座541、定位销二542、定位盘543和锁紧座544;固定座541安装于传动板51上,固定座541上穿过有定位销二542,定位销二542的前侧端套设有定位盘543,定位销二542的后侧端通过螺纹可拆卸锁紧有锁紧座544。通过将定位销二542穿过头端部101上开设的穿孔104,利用定位盘543、锁紧座544与固定座541之间相配合,将头端部101进行锁紧固定。
34.请继续参阅图1~8所示,在本实施例的基础上,具体的,定位组件二53设置的数量至少为两组,其具体包括:放置板二531、l型板二532和手动压紧钳533;放置板二531的前后端对称设有l型板二532,l型板二532上对称安装有手动压紧钳533。通过上述手动压紧钳533可将尾端部102的前后侧顶部进行压紧固定。
35.在本实施例的基础上,具体的,放置板一522和放置板二531的顶部中部均设有承接板534。通过承接板534可直接用于与叉车脚10上的尾端部102底部相抵接承接。
36.在本实施例的基础上,具体的,l型板一523上、固定座541上均插接有导向套545,通过l型板一523上的导向套545内滑动穿过有定位销一524,通过固定座541上的导向套545内滑动穿过有定位销二542。通过上述导向套545的设置,可进一步提高定位销一524、定位销二542在滑动插接时的轴向定位效果,降低发生径向移位现象。
37.在本实施例的基础上,具体的,调节板521上分别开设有若干定位螺孔一6和定位螺孔二7,通过定位螺孔一6与定位螺栓一配合,将放置板一522与调节板521可拆卸相连,来具体调节放置板一522在调节板521上的左右位置,达到具体对同规格不同长度的叉车脚10进行工装固定的目的,通过定位螺孔二7与定位螺栓二8配合,对放置板一522进行锁紧安装时进行限位。
38.在本实施例的基础上,具体的,放置板一522上还包括开设的w型槽9,w型槽9的前后弧形槽口内抵接有定位螺栓二8。上述通过定位螺栓二8的设置,在对放置板一522安装至调节板521上的位置进行调节时,可以达到对放置板一522的右侧进行限位定位的目的。即首先利用其w型槽9与定位螺栓二8相抵接后,随后在锁紧定位螺栓一,提高放置板一522锁紧安装时的便捷性。
39.在本实施例的基础上,具体的,变位机3包括:安装架31、伺服电机32、转轴33和l型
连接件34;安装架31的左侧壁上安装有伺服电机32、右侧壁上转动安装有转轴33,伺服电机32的输出端、转轴33的端部均设有l型连接件34,l型连接件34上可拆卸锁紧有传动板51。上述变位机3具体使用时,通过控制伺服电机32工作,带动传动板51转动,达到对传动板51上安装的工装夹具5进行不同角度的转换,便于焊接机器人4进行焊接。
40.在本实施例的基础上,具体的,控制柜2分别与焊机电源1、变位机3和焊接机器人4电性相连。通过控制柜2便于对变位机3和焊接机器人4实现控制和调节,通过焊机电源1实现供电稳定。
41.本实用新型中工装夹具5的具体工作过程如下:首先根据不同长度的叉车脚10,调节放置板一522在调节板521上的位置,随后将叉车脚10的尾端部102放置在承接板534上,且尾端部102的前后侧壁与l型板一523、l型板二532前后侧壁相抵接,对其进行前后限位,随后将加强部103放置在叉车脚10的尾端部102上,利用定位销一524插接穿过其尾端部102、加强部103上的穿孔104,实现对加强部103和尾端部102在左右方向上的限位固定,最后将头端部101配合放置在尾端部102的右端上,随后利用定位销二542插接穿过其头端部101上的穿孔104后,再锁紧锁紧座544,利用定位盘543、锁紧座544与固定座541的前后侧壁相配合,将头部端进行锁紧固定。
42.本实用新型在采用上述结构的设计和使用下,可批量生产同规格不同长度尺寸的产品,大量减少人力的投入,同时又提高了生产效率。
43.上述涉及的电器元件的控制方式是通过与其配套的控制终端的控制柜2进行控制的,此处控制柜2具体可为plc型号,控制电路通过本领域的技术人员简单编程即可实现,属于本领域的公知常识,仅对其进行使用,未对其进行改进,并且本实用新型主要用来保护机械装置,所以本实用新型不再详细对控制方式和电路连接进行赘述。
44.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。