技术特征:
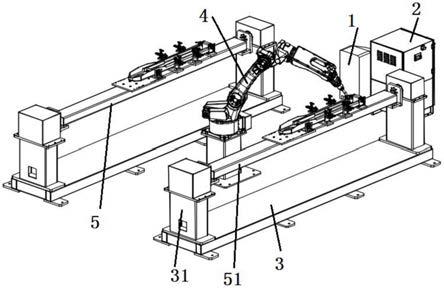
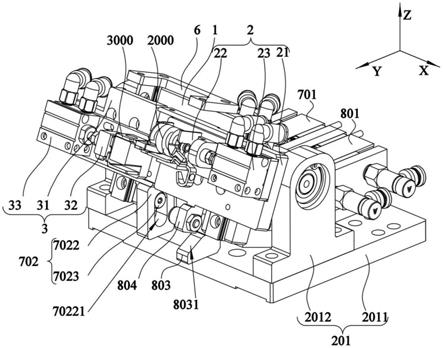
1.叉车脚机器人焊接工作站,包括:焊机电源(1)、控制柜(2)、变位机(3)和焊接机器人(4),所述焊接机器人(4)的前后侧对称安装有所述变位机(3),所述变位机(3)的传动端可拆卸安装有工装夹具(5),其特征在于:所述工装夹具(5)包括:传动板(51)、定位组件一(52)、定位组件二(53)和定位组件三(54);所述传动板(51)上从左至右依次设有所述定位组件一(52)、所述定位组件二(53)和所述定位组件三(54);所述定位组件一(52)包括:调节板(521)、放置板一(522)、l型板一(523)和定位销一(524);所述调节板(521)安装于所述传动板(51)上,所述调节板(521)的右端可调节锁紧有所述放置板一(522),所述放置板一(522)的前后端对称设有所述l型板一(523),所述l型板一(523)上滑动穿过有所述定位销一(524);所述定位组件三(54)包括:固定座(541)、定位销二(542)、定位盘(543)和锁紧座(544);所述固定座(541)安装于所述传动板(51)上,所述固定座(541)上穿过有所述定位销二(542),所述定位销二(542)的前侧端套设有所述定位盘(543),所述定位销二(542)的后侧端通过螺纹可拆卸锁紧有所述锁紧座(544)。2.根据权利要求1所述的叉车脚机器人焊接工作站,其特性在于,所述定位组件二(53)设置的数量至少为两组,其具体包括:放置板二(531)、l型板二(532)和手动压紧钳(533);所述放置板二(531)的前后端对称设有所述l型板二(532),所述l型板二(532)上对称安装有所述手动压紧钳(533)。3.根据权利要求2所述的叉车脚机器人焊接工作站,其特性在于,所述放置板一(522)和所述放置板二(531)的顶部中部均设有承接板(534)。4.根据权利要求1所述的叉车脚机器人焊接工作站,其特性在于,所述l型板一(523)上、所述固定座(541)上均插接有导向套(545),通过所述l型板一(523)上的所述导向套(545)内滑动穿过有所述定位销一(524),通过所述固定座(541)上的所述导向套(545)内滑动穿过有所述定位销二(542)。5.根据权利要求1所述的叉车脚机器人焊接工作站,其特性在于,所述调节板(521)上分别开设有若干定位螺孔一(6)和定位螺孔二(7),通过所述定位螺孔一(6)与定位螺栓一配合,将所述放置板一(522)与所述调节板(521)可拆卸相连,通过所述定位螺孔二(7)与定位螺栓二(8)配合,对所述放置板一(522)进行锁紧安装时进行限位。6.根据权利要求5所述的叉车脚机器人焊接工作站,其特性在于,所述放置板一(522)上还包括开设的w型槽(9),所述w型槽(9)的前后弧形槽口内抵接有所述定位螺栓二(8)。7.根据权利要求1所述的叉车脚机器人焊接工作站,其特性在于,所述变位机(3)包括:安装架(31)、伺服电机(32)、转轴(33)和l型连接件(34);所述安装架(31)的左侧壁上安装有所述伺服电机(32)、右侧壁上转动安装有所述转轴(33),所述伺服电机(32)的输出端、所述转轴(33)的端部均设有所述l型连接件(34),所述l型连接件(34)上可拆卸锁紧有所述传动板(51)。8.根据权利要求1所述的叉车脚机器人焊接工作站,其特性在于,所述控制柜(2)分别与所述焊机电源(1)、所述变位机(3)和所述焊接机器人(4)电性相连。
技术总结
本实用新型涉及叉车脚焊接加工技术领域,具体涉及叉车脚机器人焊接工作站,包括:焊机电源、控制柜、变位机和焊接机器人,焊接机器人的前后侧对称安装有变位机,变位机的传动端可拆卸安装有工装夹具:工装夹具包括:传动板、定位组件一、定位组件二和定位组件三;传动板上从左至右依次设有定位组件一、定位组件二和定位组件三;定位组件一包括:调节板、放置板一、L型板一和定位销一;调节板安装于传动板上,调节板的右端可调节锁紧有放置板一,放置板一的前后端对称设有L型板一,L型板一上滑动穿过有定位销一,可批量生产同规格不同长度尺寸的产品,大量减少人力的投入,同时又提高了生产效率。率。率。
技术研发人员:冯华兴 秦晓东
受保护的技术使用者:无锡金红鹰工业自动化有限公司
技术研发日:2021.05.24
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。