1.本实用新型涉及夹具技术领域,具体涉及一种缸头打磨机器人专用抓取夹具。
背景技术:
2.发动机缸体是汽车、摩托车等交通工具的重要组成部件,因此发动机缸体的制作尤为重要。在发动机缸体制作过程中需要进行多种工序,如浇铸成型、打磨等。尤其是,缸体作为箱体类零件,拥有孔、面较多,呈复杂形状和结构,没有均匀的壁厚且筋多,常见的夹具容易将发动机缸体外部的筋条夹出凹痕或形变,因此,急需一种不易在发动机缸体外产生夹痕的抓取夹具。
技术实现要素:
3.本实用新型旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种缸头打磨机器人专用抓取夹具。
4.为了实现本实用新型的上述目的,本实用新型提供了一种缸头打磨机器人专用抓取夹具,包括安装架,所述安装架上安装有伸出端横向伸出的抓取气缸,所述抓取气缸的伸出端上铰接夹紧臂,所述安装架的底板侧面开设有与夹紧臂匹配的竖向延伸让位槽,所述夹紧臂的上端与伸出端铰接,下端穿过让位槽伸到安装架下方,所述安装架上侧对应让位槽的左右两侧的槽口对称设有铰接支耳,所述夹紧臂的中部通过穿过两个铰接支耳的转动销转动连接在铰接支耳之间,所述夹紧臂的底端设有夹紧块,所述安装架底面夹紧块左右两侧分别设有顶针,所述顶针用于与工件的凹坑的裙边相抵,所述安装架底侧的后半部设有伸到工件凹坑定位孔内的定位柱,所述定位柱与工件的凹坑的内壁相抵。
5.上述方案中:所述夹紧块左右延伸设置,与夹紧臂组合形成倒t型。
6.上述方案中:所述安装架的底板上竖向设置有隔板,通过隔板将抓取气缸和夹紧臂隔开,且隔板上开设有供抓取气缸的伸出端伸出的通孔。
7.上述方案中:所述隔板上设有连接法兰盘。便于与机械臂连接。
8.上述方案中:所述连接法兰盘靠隔板的左上角或右上角设置。设置在左上角或右上角,能够斜向取件,不易碰到工件,提高取件稳定性。
9.上述方案中:所述定位柱和顶针均为可拆卸连接在安装架的底板上。当定位柱或顶针不匹配或有磨损时,能够进行更换。
10.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:通过定位柱和夹紧块与与工件的凹坑内侧壁相抵,实现夹取固定,适用于工件外部打磨加工,避免夹取工件外部筋条进行夹取固定,有效保障工件外部完整度,保证加工合格率。
11.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
12.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
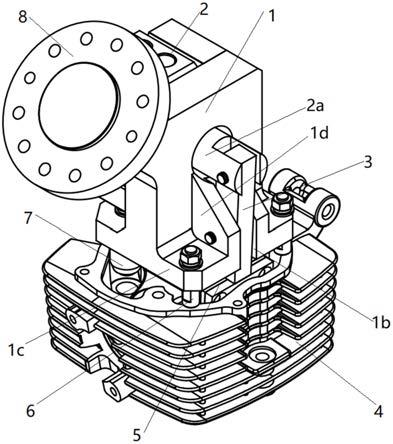
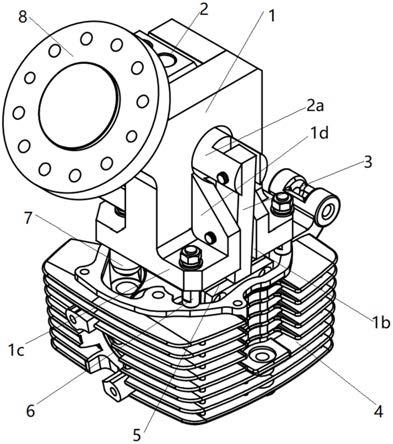
13.图1是本实用新型夹取工件的立体图;
14.图2是图1的左视图;
15.图3是安装架的正视图。
具体实施方式
16.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
17.如图1
‑
图3所示,一种缸头打磨机器人专用抓取夹具,包括安装架1,安装架1上安装有伸出端2a横向伸出的抓取气缸2。抓取气缸2的伸出端2a上铰接有向下延伸到安装架1下方的夹紧臂3。安装架1的底板1c前侧面开设有与夹紧臂3匹配的竖向延伸的让位槽1b,所述夹紧臂3的上端与伸出端2a铰接,下端穿过让位槽1b伸到安装架1下方,所述安装架1上侧对应让位槽1b的左右两侧的槽口对称设有铰接支耳1d。所述夹紧臂3的中部通过穿过两个铰接支耳1d的转动销转动连接在铰接支耳1d之间。夹紧臂3的底端设有夹紧块5,其中,夹紧块5左右延伸设置,与夹紧臂3组合形成倒t型。所述安装架1底面夹紧块5左右两侧分别设有顶针6,顶针6用于与工件4凹坑裙边相抵。安装架1底侧的后半部设有伸到工件4凹坑定位孔内的定位柱7。最好是,定位柱7和顶针6均为可拆卸连接在安装架1的底板1c上。
18.安装架1的底板1c上竖向设置有隔板1a,通过隔板1a将抓取气缸2和夹紧臂3隔开,且隔板1a上开设有供抓取气缸2的伸出端2a伸出的通孔。隔板1a上设有连接法兰盘8,法兰盘8用于与机械臂连接。且,连接法兰盘8靠隔板1a的左上角。
19.使用时,通过机械臂将抓取夹具的底端放到工件4的凹坑中,直至顶针6的底端和定位柱7的底端与工件4互相接触,再驱动抓取气缸2缩回伸出端2a,使得定位柱7、夹紧块5均与工件4的凹坑内侧壁相抵,以此实现夹取。
20.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
技术特征:
1.一种缸头打磨机器人专用抓取夹具,其特征在于:包括安装架(1),所述安装架(1)上安装有伸出端(2a)横向伸出的抓取气缸(2),所述抓取气缸(2)的伸出端(2a)上铰接夹紧臂(3),所述安装架(1)的底板(1c)侧面开设有与夹紧臂(3)匹配的竖向延伸的让位槽(1b),所述夹紧臂(3)的上端与伸出端(2a)铰接,下端穿过让位槽(1b)伸到安装架(1)下方,所述安装架(1)上侧对应让位槽(1b)的左右两侧的槽口对称设有铰接支耳(1d),所述夹紧臂(3)的中部通过穿过两个铰接支耳(1d)的转动销转动连接在铰接支耳(1d)之间,所述夹紧臂(3)的底端设有夹紧块(5),所述安装架(1)底面夹紧块(5)左右两侧分别设有顶针(6),所述顶针(6)用于与工件(4)的凹坑的裙边相抵,所述安装架(1)底侧的后半部设有伸到工件(4)凹坑定位孔内的定位柱(7),所述定位柱(7)与工件(4)的凹坑的内壁相抵。2.根据权利要求1所述的一种缸头打磨机器人专用抓取夹具,其特征在于:所述夹紧块(5)左右延伸设置,与夹紧臂(3)组合形成倒t型。3.根据权利要求1所述的一种缸头打磨机器人专用抓取夹具,其特征在于:所述安装架(1)的底板(1c)上竖向设置有隔板(1a),通过隔板(1a)将抓取气缸(2)和夹紧臂(3)隔开,且隔板(1a)上开设有供抓取气缸(2)的伸出端(2a)伸出的通孔。4.根据权利要求3所述的一种缸头打磨机器人专用抓取夹具,其特征在于:所述隔板(1a)上设有连接法兰盘(8)。5.根据权利要求4所述的一种缸头打磨机器人专用抓取夹具,其特征在于:所述连接法兰盘(8)靠隔板(1a)的左上角或右上角设置。6.根据权利要求1所述的一种缸头打磨机器人专用抓取夹具,其特征在于:所述定位柱(7)和顶针(6)均为可拆卸连接在安装架(1)的底板(1c)上。
技术总结
本实用新型提出了一种缸头打磨机器人专用抓取夹具,包括安装架,所述安装架上安装有伸出端横向伸出的抓取气缸,所述抓取气缸的伸出端上铰接有向下延伸到安装架下方的夹紧臂,所述安装架的底板上开设有供夹紧臂转动的前后延伸的让位槽,所述安装架上对应让位槽的左右两侧均设有铰接支耳,所述夹紧臂的中部通过穿过两个铰接支耳的转动销转动连接在安装架上,所述夹紧臂的底端设有夹紧块,所述安装架底侧设有位于夹紧块左右两侧的顶针,所述顶针用于与工件凹坑裙边相抵,所述安装架底侧的后半部设有伸到工件凹坑定位孔内的定位柱。半部设有伸到工件凹坑定位孔内的定位柱。半部设有伸到工件凹坑定位孔内的定位柱。
技术研发人员:陶冶
受保护的技术使用者:重庆耐德摩托车零件制造有限公司
技术研发日:2021.05.27
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。