1.本发明涉及起重工程机械领域,尤其涉及一种折臂汽车起重机用六节伸缩臂装置。
背景技术:
2.汽车起重机是起重机械的一种,适用于流动性吊装作业。常规汽车起重机由于回转半径大、作业空间高度高等限制条件主要用于流动性强的露天装卸作业,而对于空间相对狭小的厂房及隧道等作业场所,常规汽车起重机的吊装性能并不能得到充分利用。
3.折臂式汽车起重机在继承了常规汽车起重机流动性强的优点的基础上,具有空间利用率高,回转半径小,动作灵活等优势,能够在相对狭小的空间内进行施工作业并充分发挥自身的吊装性能。随着折臂汽车起重机被广泛的应用于吊装行业,吊臂伸缩的平稳性和微动性等关键性能越来越受重视。
4.中国专利公开了一种汽车起重机六节起重臂伸缩机构(cn210635631u),包括一节臂、二节臂、三节臂、四节臂、五节臂和六节臂;在六节臂内设有二级油缸和单级油缸;二级油缸的各部分与一节臂、二节臂及三节臂连接;单级油缸连接三节臂与四节臂;在单级油缸的缸筒及五节臂上设有五节臂伸臂滑轮、五节臂伸臂钢丝绳、五节臂缩臂滑轮及五节臂缩臂钢丝绳;在五节臂上还设有六节臂伸臂滑轮、六节臂伸臂钢丝绳、六节臂缩臂滑轮及六节臂缩臂钢丝绳;该实用新型在臂长规定长度范围内可实现任意臂长组合,满足起重机在狭小空间内的作业需要,并使得起重臂强度和整机稳定性达到最优组合。上述技术存在的不足是:臂架伸缩装置臂架两侧受力不均匀,臂体伸缩时受到的拉力、推力不均匀,臂体伸缩的平稳性和微动性受到影响,容易产生歪斜;臂体空间利用率低,不利于在狭小空间内作业。
技术实现要素:
5.为解决上述技术问题,本发明提供一种折臂汽车起重机用六节伸缩臂装置。
6.本发明通过以下技术方案实现:,一种折臂汽车起重机用六节伸缩臂装置,包括伸缩臂主体;所述伸缩臂主体包括依次滑动连接的基本臂、一伸臂、二伸臂、三伸臂、四伸臂、五伸臂、六伸臂;所述基本臂和一伸臂之间,一伸臂和二伸臂之间,二伸臂和三伸臂之间分别安装有两个对称的油缸;所述三伸臂和四伸臂之间,四伸臂和五伸臂之间,五伸臂和六伸臂之间分别安装一个油缸;所述油缸均布在伸缩臂主体的左、右侧面和上侧面。
7.其进一步是:所述基本臂和一伸臂之间连接有一伸缸ⅰ、一伸缸ⅱ,一伸缸ⅰ、一伸缸ⅱ对称布置在伸缩臂主体的左、右侧面。
8.所述一伸臂和二伸臂之间连接有二伸缸ⅰ、二伸缸ⅱ,二伸缸ⅰ、二伸缸ⅱ对称布置在伸缩臂主体的左、右侧面,二伸缸ⅰ、二伸缸ⅱ位于一伸缸ⅰ、一伸缸ⅱ上侧。
9.所述二伸臂和三伸臂之间连接有三伸缸ⅰ、三伸缸ⅱ,三伸缸ⅰ、三伸缸ⅱ对称布置
在伸缩臂主体的左、右侧面,三伸缸ⅰ、三伸缸ⅱ位于二伸缸ⅰ、二伸缸ⅱ上侧。
10.所述三伸臂和四伸臂之间连接有四伸缸,四伸缸位于伸缩臂主体的上侧面靠右位置。
11.所述四伸臂和五伸臂之间连接有五伸缸,五伸缸位于伸缩臂主体的上侧面中间位置。
12.所述五伸臂和六伸臂之间连接有六伸缸,六伸缸位于伸缩臂主体的上侧面靠左位置。
13.与现有技术相比,本发明的有益效果是:六个伸缩机构伸缩油缸对称分布,伸缩臂主体两侧受力均匀,避免伸缩臂主体作伸缩运动时产生歪斜;第一、第二、第三伸缩机构采用双缸推动、推力稳定,不仅保证了伸缩臂主体两侧受力均匀而且能够为伸缩臂主体伸缩提供足够的推力,有利于伸缩动作的平稳性和微动性,能够更好地适应吊装作业延长了油缸的使用寿命;伸缩油缸在布置时遵循对称原则自下而上、由两侧向中间收束,巧妙的结合了伸缩臂的外形,从第一伸缩机构至第六伸缩机构伸缩装置占用空间逐渐减小,整体呈现“子弹头”形状,空间利用率高,适用于在狭小空间作业的吊装要求。
附图说明
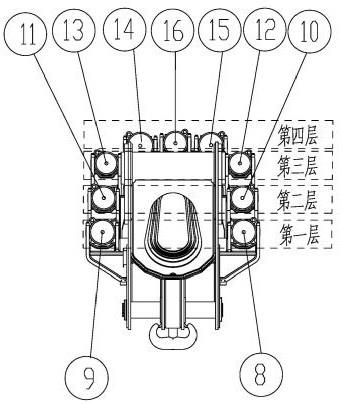
14.图1是本发明实施例主视图(缩回状态);图2是本发明左视图(缩回状态);图3是图2中俯视图(伸出状态);图中:1、基本臂;2、一伸臂;3、二伸臂;4、三伸臂;5、四伸臂;6、五伸臂;7、六伸臂;8、一伸缸ⅰ;9、一伸缸ⅱ;10、二伸缸ⅰ;11、二伸缸ⅱ;12、三伸缸ⅰ;13、三伸缸ⅱ;14、四伸缸;15、五伸缸;16、六伸缸。
具体实施方式
15.以下是本发明的一个具体实施例,现结合附图对本发明做进一步说明。
16.结合图1至图3所示,一种折臂汽车起重机用六节伸缩臂装置,伸缩臂主体包括依次滑动连接的基本臂1、一伸臂2、二伸臂3、三伸臂4、四伸臂5、五伸臂6、六伸臂7。基本臂1和一伸臂2之间连接有一伸缸ⅰ8、一伸缸ⅱ9,一伸缸ⅰ8、一伸缸ⅱ9对称布置在伸缩臂主体的左、右侧面。基本臂1、一伸臂2、一伸缸ⅰ8、一伸缸ⅱ9组成第一伸缩机构;通过一伸缸ⅰ8、一伸缸ⅱ9同时动作,完成第一伸缩机构的伸出和收缩。
17.一伸臂2和二伸臂3之间连接有二伸缸ⅰ10、二伸缸ⅱ11,二伸缸ⅰ10、二伸缸ⅱ11对称布置在伸缩臂主体的左、右侧面,二伸缸ⅰ10、二伸缸ⅱ11位于一伸缸ⅰ8、一伸缸ⅱ9上侧。一伸臂2、二伸臂3、二伸缸ⅰ10、二伸缸ⅱ11组成第二伸缩机构;通过二伸缸ⅰ10、二伸缸ⅱ11同时动作,完成第二伸缩机构的伸出和收缩。
18.二伸臂3和三伸臂4之间连接有三伸缸ⅰ12、三伸缸ⅱ13,三伸缸ⅰ12、三伸缸ⅱ13对称布置在伸缩臂主体的左、右侧面,三伸缸ⅰ12、三伸缸ⅱ13位于二伸缸ⅰ10、二伸缸ⅱ11上侧。二伸臂3、三伸臂4、三伸缸ⅰ12、三伸缸ⅱ13组成第三伸缩机构;通过三伸缸ⅰ12、三伸缸ⅱ13同时动作,完成第三伸缩机构的伸出和收缩。
19.三伸臂4和四伸臂5之间连接有四伸缸14,四伸缸14位于伸缩臂主体的上侧面靠右位置。三伸臂4、四伸臂5、四伸缸14组成第四伸缩机构;通过四伸缸14动作,完成第四伸缩机构的伸出和收缩。
20.四伸臂5和五伸臂6之间连接有五伸缸15,五伸缸15位于伸缩臂主体的上侧面中间位置。四伸臂5、五伸臂6、五伸缸15组成第五伸缩机构;通过五伸缸15动作,完成第五伸缩机构的伸出和收缩。
21.五伸臂6和六伸臂7之间连接有六伸缸16,六伸缸16位于伸缩臂主体的上侧面靠左位置。五伸臂6、六伸臂7、六伸缸16组成第六伸缩机构;通过六伸缸16动作,完成第六伸缩机构的伸出和收缩。
22.本实施例中通过伸缩油缸实现相邻伸臂之间的连接,构成不同的伸缩机构。其中,第一、第二和第三伸缩机构双缸对称分布,第四和第五伸缩机构油缸分别布置于伸缩臂主体两侧,第六伸缩机构的六伸缸16居中布置,伸缩臂主体整体上呈“子弹头”形态。本实施例中各伸由液压系统进行驱动和控制。
23.本实施例中六节伸缩臂装置采用油缸对称布置的方式并在所需推力较大的伸臂间采用双缸推动方式,不仅保证了伸缩臂主体两侧受力均匀而且能够为伸缩臂主体伸缩提供足够的推力,有利于伸缩动作的平稳性和微动性,能够更好地适应吊装作业。
24.本实施例六节伸缩臂装置中的伸缸在布置时遵循对称原则,自下而上、由两侧向中间收束,巧妙的结合了伸缩臂主体的外形,从第一伸缩机构至第六伸缩机构伸缩装置占用空间逐渐减小,整体呈现“子弹头”形状,结构设计合理,伸缩臂主体两侧受力均匀,工作时极大的减少了臂体的歪斜,外形美观紧凑,侧向空间利用率高,适应在狭小空间内吊装作业。
25.本实施例中第一伸缩机构、第二伸缩机构、第三伸缩机构受力相对较大,采用双缸对称布置,相比单缸布置,推力对称稳定并且延长了伸缩油缸的使用寿命,第四伸缩机构、第五伸缩机构、第六伸缩机构采用单缸对称分布,第四伸缩机构、第五伸缩机构油缸分别布置于臂架两侧,第六伸缩机构油缸居中布置,相比伸缩油缸依次布置臂架两侧受力更均匀,结构设计更合理,保证了伸缩装置运动的平稳性和微动性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。