1.本实用新型涉及无人机停机坪技术领域,具体涉及一种停机坪的降落平台。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输,目前无人机正在迅速的发展,功能方面不断更新,可以完成的任务也不断增加,民用方面,无人机 行业应用,是无人机真正的刚需;目前在航拍、农业、植保、自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.现有的无人机在取出或者完成任务后所需的停机坪的结构复杂,停机精准度不高,使用效率更低。
技术实现要素:
4.本实用新型要解决的技术问题是克服现有技术的不足,提供一种停机坪的降落平台。该停机坪的降落平台降落精准度高,操作灵活高效,并且结构可靠性更强,使用寿命长。
5.本实用新型所要解决的上述问题通过以下技术方案以实现:
6.一种停机坪的降落平台,包括:平台板,其用于停落无人机;所述平台板位于底机架的上端并且可在所述底机架上做升降往返运行;主监测组件,所述主监测组件安装在所述平台板中部的监测孔,并且所述主监测组件的监测射线方向垂直于所述平台板;辅助监测组件,所述辅助监测组件倾斜固定在所述平台板的侧端,并且所述辅助监测组件的监测射线朝向所述主监测组件的监测射线;纠偏装置,所述纠偏装置位于所述平台板1的上表面,其用于纠偏无人机的位置。
7.优选的,所述主监测组件的最高点的位置小于或者等于所述监测孔的最高处。
8.优选的,所述辅助监测组件选用四个,分别位于所述平台板的四个边角并且所述辅助监测组件的监测射线均与所述主监测组件的监测射线相交于一点。
9.优选的,所述主监测组件包括主检测器,所述主检测器位于所述监测孔处,并且所述主检测器的监测射线垂直于所述平台板上表面所在的平面。
10.优选的,所述辅助监测组件包括辅助监测器,所述辅助监测器的底部可调节式倾斜连接在所述平台板的侧端,所述辅助监测器的背部通过限位件安装在所述平台板的侧端,使得辅助监测组件呈倾斜状态。
11.优选的,所述辅助监测器的倾斜角α为30
‑
60度。
12.优选的,所述辅助监测器和主检测器均选用红外感应器。
13.优选的,所述纠偏装置包括y轴纠偏组件和x轴纠偏组件,所述 y轴纠偏组件和x轴纠偏组件均选用两个并且对称分布在所述平台板的上表面。
14.优选的,所述y轴纠偏组件包括第一纠偏气缸、第一驱动轴和第一纠偏板,所述第一纠偏气缸固定在所述平台板的上表面并且与所述第一驱动轴的一端固定连接,所述第一驱动轴的另一端可驱动第一纠偏板进行y轴伸缩往返运行。
15.优选的,所述x轴纠偏组件包括第二纠偏气缸、第二驱动轴和第二纠偏板,所述第二纠偏气缸固定在所述平台板的上表面并且与所述第二驱动轴的一端固定连接,所述第二驱动轴的另一端可驱动第二纠偏板进行x轴伸缩往返运行。
16.有益效果:采用本实用新型所述的结构后,通过多点监测定位可以使得无人机沿着所设定的路线进行降落至平台板上,然后再驱动纠偏装置运转使得发生少部分偏移的无人机纠正直立,进而促使平台板进行降落收集入停机坪的内部,可以得到降落精准度高,操作灵活高效的降落平台;除此该降落平台结构可靠性更高,使用寿命长。
附图说明
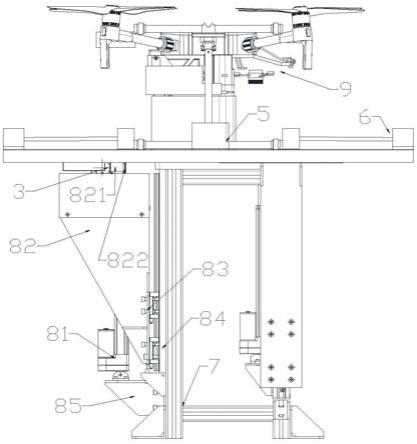
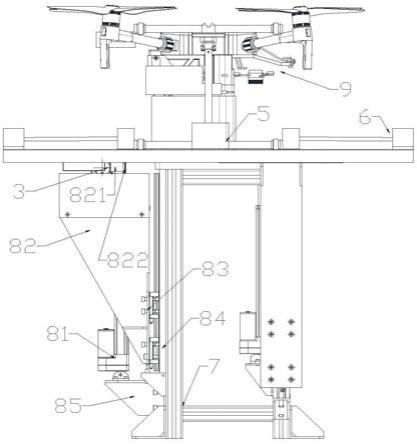
17.图1是本实用新型所述的一种停机坪的降落平台的主要结构示意图。
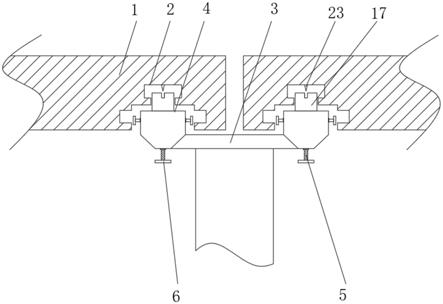
18.图2是本实用新型所述的一种停机坪的降落平台的俯视结构示意图。
19.图3是本实用新型所述的一种停机坪的降落平台的平台板与主、辅助监测组件的主视结构示意图。
20.图4是图3的a部分放大结构示意图。
21.图5是图4的b部分放大结构示意图。
22.图1
‑
5:1
‑
平台板;11
‑
降落凹槽;12
‑
监测孔;2
‑
主监测组件; 21
‑
主检测器;22
‑
第一定位件;23
‑
第一支座;24
‑
第一限位件;3
‑ꢀ
辅助监测组件;31
‑
第三支座;311
‑
第二限位件;3111
‑
限位空腔;32
‑ꢀ
第二支座;33
‑
第二限位件;35
‑
第二限位件;36
‑
辅助监测器;37
‑ꢀ
调节件;38
‑
支撑支架;5
‑
y轴纠偏组件;6
‑
x轴纠偏组件;7
‑
底机架; 81
‑
升降驱动丝杆;82
‑
支撑板;821
‑
连接块;822
‑
连接杆;83
‑
滑动块;84
‑
滑动导轨;85
‑
支撑底座;9
‑
无人机本体。
具体实施方式
23.下面结合附图和具体实施例对本实用新型做进一步详细的说明,但实施例对本实用新型不做任何形式的限定。
24.实施例1:
25.本说明书所描述的“前”、“后”、“左”和“右”等方位名称都是根据本说明书所用的示意图所决定的。
26.如图1
‑
2所示,一种停机坪的降落平台,包括:平台板1,其用于停落无人机9;所述平台板1位于底机架7的上端并且可在所述底机架7上做升降往返运行;主监测组件2,所述主监测组件2安装在所述平台板1中部的监测孔12,并且所述主监测组件2的监测射线方向垂直于所述平台板1;辅助监测组件3,所述辅助监测组件3倾斜固定在所述平台板1的侧端,并且所述辅助监测组件3的监测射线朝向所述主监测组件2的监测射线;纠偏装置,所述纠偏装置位于所述平台板1的上表面,其用于纠偏无人机9的位置。通过多点监测定位可以使得无人机沿着所设定的路线进行降落至平台板上,然后再驱动纠偏装置运转使得发生少部分偏移的无人机纠正直立,进而促使平台板进行降落收集入停机坪的内部,可以得到降落精准度高,操作灵活高效的降落平台;除此该降落平台结构可靠性更高,使用寿命长。
27.具体地,所述平台板1上设置有用于停落无人机的降落凹槽11,通过降落凹槽可以为无人机降落提供合理精准的范围。
28.具体地,所述主监测组件2的最高点的位置小于或者等于所述监测孔12的最高处,通过合理位置的主检测组件可以避免无人机降落时与所述主检测组件发生撞击,减少哥哥设备之间发生损坏。
29.具体地,如图3所示,所述辅助监测组件3选用四个,分别位于所述平台板1的四个边角并且所述辅助监测组件3的监测射线均与所述主监测组件2的监测射线相交于一点。保障监测精准度。
30.具体地,如图4
‑
5所示,所述主监测组件2包括主检测器21、第一定位件22、第一支座23和第一限位件24,所述主检测器21位于所述监测孔12处,所述第一定位件22的两端分别与所述主检测器 21的底部、第一限位件24的内侧端连接,所述第一限位件24固定在所述第一支座23上,所述第一支座23固定在所述平台板1的底部,通过该结构可以保障所述主检测器的安装稳定性。
31.其中,所述第一限位件24选用两个且分别位于第一支座23的上端,并且所述第一限位件24与所述第一支座23形成u型限位结构,通过u型限位结构可以更加稳定地固定住监测器。
32.具体地,所述辅助监测组件3包括辅助监测器36、调节组件和第二限位组件,所述调节组件位于所述平台板1的侧端并且与所述辅助监测器36的底部活动连接,所述第二限位组件位于所述平台板1 的侧端并且与所述辅助监测器36的背端限位固定连接,所述调节组件用于调节所述辅助监测器36的倾斜角度,所述第二限位组件用于限制辅助监测器36的固定位置。
33.具体地,所述调节组件和第二限位组件均固定在支撑支架38上表面,所述支撑支架38固定在所述平台板1的底部表面,并且所述辅助监测器36的最高点与所述平台板1的表面的相持平或者低于所述平台板1的表面,通过支撑支架可以再进一步地保障辅助监测器 36的安装稳定性。具体地,所述调节组件包括第二支座32、第二限位件33和第二限位件35,所述第二限位件35固定在所述支撑支架 38的上表面,所述第二限位件33固定在所述支撑支架38的上表面并且所述第二限位件33与所述支撑支架38形成u安装结构,所述第二限位件35的底部铰接连接在所述第二限位件33的内侧端,使得辅助监测器36可以根据需求进行调节倾斜角度,所述第二限位件35的顶部与所述辅助监测器36的底部固定连接。
34.具体,所述第二限位组件包括第三支座31和第二限位件311,所述第三支座31固定在所述支撑支架38上表面,所述第二限位件 311的底部铰接连接在所述第三支座31的限位空腔3111内,所述第二限位件311的顶部穿插固定在所述辅助监测器36背部的限位孔内,所述限位孔竖直方向等距排布。
35.具体地,所述辅助监测器36的倾斜角α为30
‑
60度,最优选方案为30度,通过可以增加精准地监测到无人机的降落点位置,避免发生过多的偏移。
36.其中,所述辅助监测器36和主检测器21均选用红外感应器。
37.具体地,如图1所示,所述纠偏装置包括y轴纠偏组件5和x轴纠偏组件6,所述y轴纠偏组件5和x轴纠偏组件6均选用两个并且对称分布在所述平台板1的上表面,通过相对称分布x轴纠偏组件6 的运行驱动可以将无人机的x轴方向位置摆正,通过相对称分布y轴纠偏
组件5的运行驱动将无人机的y轴方向位置摆正,进而使得无人机的位置保持正立状态置放在降落凹槽内。
38.其中,所述y轴纠偏组件5包括第一纠偏气缸53、第一驱动轴 52和第一纠偏板51,所述第一纠偏气缸53固定在所述平台板1的上表面并且与所述第一驱动轴52的一端固定连接,所述第一驱动轴52 的另一端可驱动第一纠偏板51进行y轴伸缩往返运行;
39.所述x轴纠偏组件6包括第二纠偏气缸61、第二驱动轴62和第二纠偏板63,所述第二纠偏气缸61固定在所述平台板1的上表面并且与所述第二驱动轴62的一端固定连接,所述第二驱动轴62的另一端可驱动第二纠偏板63进行x轴伸缩往返运行。
40.具体地,所述平台板1通过升降组件活动连接在所述机架7的上方。其中,所述升降组件包括安装在支撑底座85上的升降驱动丝杆 81和可升降往返运动在所述升降驱动丝杆81上的支撑板82,所述支撑底座85安装在所述机架7的侧端,所述支撑板82的顶部通过拼接结构与所述平台板1的底部连接。
41.具体地,所述拼接结构包括连接块821和安装在所述连接块821 底部的连接杆822;所述连接块821安装在所述平台板1的底部,所述连接杆822安装在所述支撑板82的顶部。提高结构稳定性和可靠性。
42.具体地,靠近所述机架7侧端一侧的支撑板82上设置有滑动块 83,靠近所述支撑板82一侧的机架7上设置有可与滑动块滑动配合的滑动导轨84。再进一步地提高结构可靠性和牢固性。
43.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
44.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。