:
1.本实用新型涉及清扫机器人领域,尤其涉及一种具有主刷升降装置的清扫机器人。
背景技术:
2.随着社会的发展机器人在人们的日常生活中越来越普及,而清扫机器人则是一种常见的机器人,它能在移动的同时使用底部的刷子清扫路面垃圾,使用十分方便,现有技术中扫地机器人主刷结构多为固定式结构或单驱动主刷升降结构,但实际使用中主刷会发生一定的磨损,当磨损达到一定程度后就需要人工调节主刷两侧离地高度,使得主刷能和地面接触,同时也要保证接触不能过度增加刷子的磨损。
技术实现要素:
3.本实用新型的目的是针对现有技术的缺陷,提供一种使用方便,能有效调节主刷离地高度的具有主刷升降装置的清扫机器人。
4.本实用新型是通过如下技术方案实现的:一种具有主刷升降装置的清扫机器人,包括车体,所述车体上设有主刷固定机构,所述主刷固定机构包括固定支架、摆臂、线性驱动器和驱动装置,所述线性驱动器固定连接所述车体上,所述摆臂两端分别设有第一从动轮和第二从动轮,所述驱动装置输出轴上的主动轮带动所述第一从动轮转动,所述第一从动轮带动所述第二从动轮转动,所述驱动装置的一端铰接在车体上,另一端铰接在所述固定支架上,所述固定支架固定连接在所述摆臂的所述第二从动轮所在端。
5.在上述技术方案中,所述车体两侧对称设置有两个主刷固定机构,且两个主刷固定机构的两个所述第一从动轮间设有联动轴。
6.在上述技术方案中,线性驱动器为气缸,所述驱动装置为电机,所述主动轮、所述第一从动轮和所述第二从动轮通过皮带传动。
7.在上述技术方案中,所述车体上还装有编码器及其传感装置。
8.本实用新型的有益效果是:本实用新型采用双驱动升降结构,主刷两侧为摆臂结构,线性驱动器和主刷固定支架安装在摆臂的自由端,驱动器伸缩时带动摆臂自由端摆动,也就实现了主刷的摆动升降,机械化控制升降,使用更加方便,而且摆臂的一端为自由端,使用时能根据实际情况进行一定程度的自适应调节。
附图说明:
9.图1为本实用新型的立体结构示意图;
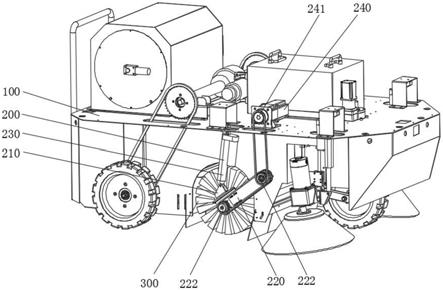
10.图2为本实用新型去掉外壳的立体结构示意图;
11.图3为本实用新型主刷自动调节的流程图;
12.标号如下:车体100;主刷固定机构200;固定支架210;摆臂220;第一从动轮221;第二从动轮222;线性驱动器230;驱动装置240;主动轮241;刷子300。
具体实施方式:
13.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易被本领域人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
14.如图1、图2所示,一种具有主刷升降装置的清扫机器人,包括车体100,车体100上设有主刷固定机构200,主刷固定机构200包括线性驱动器230固定连接车体100上,摆臂220两端分别设有第一从动轮221和第二从动轮222,驱动装置240输出轴上的主动轮241带动第一从动轮221转动,第一从动轮221带动第二从动轮222转动,驱动装置240的一端铰接在车体100上,另一端铰接在固定支架210上,固定支架210固定连接在摆臂220的第二从动轮222所在一端。
15.如图1所示,车体100两侧对称设置有两个主刷固定机构200,且两个主刷固定机构200的两个第一从动轮221间设有联动轴,两个主刷固定机构200在相互独立的同时一端联动,使得刷子300能有小范围的倾斜来适应磨损
16.如图2所示,线性驱动器230为气缸,驱动装置240为电机,主动轮241、第一从动轮221和第二从动轮222通过皮带传动。
17.如图3所示,车体100上还装有编码器及其传感装置。用编码器进行位置检测和电流检测,当主刷下降与地面接触时,只需检测两侧驱动器电流即可实现主刷调平,此时记录编码器位置即可,当主刷出现磨损时,即使一侧磨损大一侧磨损小,也可通过调平程序补偿两侧偏磨量。
18.另外,在本实用新型实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”、“设有”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
19.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”、“侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
20.最后应说明的是:以上实施例,仅为本实用新型的具体实施方式,用以说明本实用新型的技术方案,而非对其限制,本实用新型的保护范围并不局限于此,尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的精神和范围,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
技术特征:
1.一种具有主刷升降装置的清扫机器人,包括车体(100),其特征在于:所述车体(100)上设有主刷固定机构(200),所述主刷固定机构(200)包括固定支架(210)、摆臂(220)、线性驱动器(230)和驱动装置(240),所述线性驱动器(230)固定连接所述车体(100)上,所述摆臂(220)两端分别设有第一从动轮(221)和第二从动轮(222),所述驱动装置(240)输出轴上的主动轮(241)带动所述第一从动轮(221)转动,所述第一从动轮(221)带动所述第二从动轮(222)转动,所述驱动装置(240)的一端铰接在车体(100)上,另一端铰接在所述固定支架(210)上,所述固定支架(210)固定连接在所述摆臂(220)的所述第二从动轮(222)所在端。2.根据权利要求1所述的一种具有主刷升降装置的清扫机器人,其特征在于:所述车体(100)两侧对称设置有两个主刷固定机构(200),且两个主刷固定机构(200)的两个所述第一从动轮(221)间设有联动轴。3.根据权利要求1所述的一种具有主刷升降装置的清扫机器人,其特征在于:线性驱动器(230)为气缸,所述驱动装置(240)为电机,所述主动轮(241)、所述第一从动轮(221)和所述第二从动轮(222)通过皮带传动。4.根据权利要求1所述的一种具有主刷升降装置的清扫机器人,其特征在于:所述车体(100)上还装有编码器及其传感装置。
技术总结
本实用新型涉及一种具有主刷升降装置的清扫机器人,包括车体,车体上设有主刷固定机构,主刷固定机构包括固定支架、摆臂、线性驱动器和驱动装置,线性驱动器固定连接车体上,驱动装置的一端铰接在车体上,另一端铰接在固定支架上,固定支架固定连接在摆臂的第二从动轮所在端。本实用新型采用双驱动升降结构,主刷两侧为摆臂结构,线性驱动器和主刷固定支架安装在摆臂的自由端,驱动器伸缩时带动摆臂自由端摆动,也就实现了主刷的摆动升降,机械化控制升降,使用更加方便,而且摆臂的一端为自由端,使用时能根据实际情况进行一定程度的自适应调节。应调节。应调节。
技术研发人员:朱香平 刘丽军 冯晓晔
受保护的技术使用者:常州中智永浩机器人有限公司
技术研发日:2020.12.29
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。