1.本实用新型涉平面超声表面强化领域,特别是涉及一种表面超声强化装置。
背景技术:
2.金属材料工件因其所使用的工作环境有不同的表面强度要求;金属材料的工件常在使用过程中受到磨损、腐蚀等损伤,导致工件的表面属性、功能属性达不到预期的使用要求。超声表面强化工艺使得金属材料工件具有更高的表面硬度、更低的表面粗糙度值、更大的残余压应力及塑性变形,提高工件表面机械性能。
3.目前使用的表面超声强化装置会存在因为加工压头不灵活,需要手工更改工件加工方向的情况,增加了人工成本的同时,容易出现加工不到位漏加工的情况,或者因为地面不平导致底座不平,在加工过程中出现表面加工不均匀,出现工件加工质量不佳的情况,为了提高金属材料工件的表面强度等性能要求,提高加工灵活性,精确性,急需设计了一种超声表面强化装置。
技术实现要素:
4.实用新型目的:为了克服现有技术中存在的不足,本实用新型提供一种表面超声强化装置。
5.技术方案:为实现上述目的,本实用新型的一种表面超声强化装置,设有支架、并联机器人。
6.所述并联机器人设有动平台和多组机器臂控制模组,所述机器臂控制模组连接有机械臂,所述机械臂连接动平台,所述动平台设有加工模组,所述加工模组设有超声高频振动压头和激光测距传感器,所述动平台下方设有自平衡台面。
7.所述自调平工作台设有固定底座,所述固定底座下方设有支撑脚所述支撑脚设有定向杆,所述定向杆设有弹簧,所述定向杆上方连接有台面,所述支撑脚侧面连接有调平控制模组,所述调平控制模组设有调平驱动电机,所述调平驱动电机连接有蜗轮及蜗杆,所述蜗杆顶部接触台面底部,所述调平驱动电机可驱动蜗杆上下移动。
8.进一步的,所述支架设有顶板和底架,所述顶板和底架通过多组立杆连接,所述立杆之间在顶板下方通过横梁a连接,在底架上方通过横梁b连接,所述立杆侧面设有滑轨,所述滑轨连接机械臂控制模组。
9.进一步的,所述机器臂控制模组设有驱动电机,所述驱动电机连接在立杆上方侧面,所述驱动电机连接有丝杆,所述丝杆上设有滑块,所述滑块与滑轨滑动连接,所述丝杆底端设有限位板,所述驱动电机可驱动丝杆旋转,从而带动滑块在滑轨上移动。
10.进一步的,所述定向杆一端穿过固定底座连接台面,所述弹簧套设在定向杆未穿过固定底座的一端。
11.进一步的,所述滑块两侧设有万向节,所述万向节连接机械臂。
12.进一步的,所述动平台设有万向节,所述动平台与机械臂通过万向节连接。
13.进一步的,所述固定底座连接在横梁b中部
14.进一步的,所述动平台设有传感器固定座,所述激光测距传感器设置在传感器固定座上。
15.本实用新型的有益效果是:
16.1.本实用新型通过并联机器人与加工模块的相互协助配合,使机械臂可多个自有度的运动,通过机器臂控制模组控制机械臂调整动平台,动平台可以在快速灵活多自由度的运动,加工模组安装在动平台上,实现多角度多方向的工件加工,无需手工变换工件位置,节约人工成本。
17.2.加入自调平工作台,调平电机控制蜗杆,调整台面整体保持水平,防止了各种因素下导致台面无法水平,而导致工件加工不均的情况,而定位杆上的弹簧在调整水平时,挤压固定底座,使得台面保持向下的作用力,保持台面稳定的同时,方便复位。
附图说明
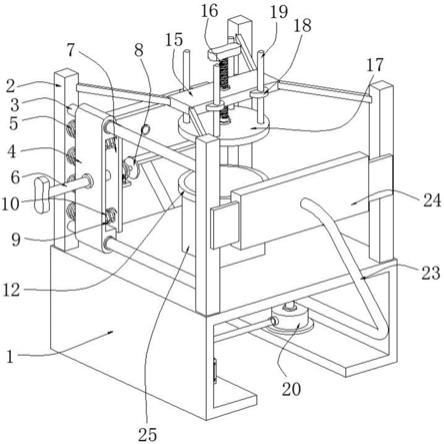
18.附图1为本实施例一种表面超声强化装置的整体结构示意图;
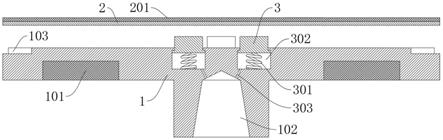
19.附图2为本实施例一种表面超声强化装置的并联机器人结构示意图;
20.附图3为本实施例一种表面超声强化装置的自调平工作台结构示意图;
21.附图4为本实施例一种表面超声强化装置的机器臂控制模组结构示意图;
22.附图5为本实施例一种表面超声强化装置的局部机构示意图之一;
23.附图6为本实施例一种表面超声强化装置的局部机构示意图之二;
24.附图7为本实施例一种表面超声强化装置的局部机构示意图之三;
具体实施方式
25.下面结合附图对本实用新型作更进一步的说明。
26.实施例,如图1至图7示,一种表面超声强化装置,设有支架1、并联机器人2。
27.支架1设有顶板101和底架102,顶板101底部固定连接三组立杆103,立杆103下端固定连接底架102,立杆103之间在顶板下方固定连接横梁 a104,在底架上方固定连接横梁b105,立杆103侧面固定连接滑轨106,滑轨106滑动连接机械臂控制模组201
28.并联机器人2设有动平台203和多组机器臂控制模组201,机器臂控制模组201设有驱动电机204,驱动电机204固定连接在立杆103上方侧面,驱动电机204连接有丝杆205,丝杆205上螺纹连接有滑块206,滑块206 滑动连接在滑轨106上,丝杆205底端连接有限位板207,所述限位板207 固定安装在立杆103上,驱动电机204可驱动丝杆205旋转,从而带动滑块206在滑轨106上移动,滑块206通过第一万向节连接有机械臂202,机械臂202通过第二万向节连接动平台203,动平台203设有加工模组3,加工模组3设有超声高频振动压头301和激光测距传感器302,超声高频振动压头301安装在动平台中心203,动平台203侧面固定连接传感器固定座 303,激光测距传感器302固定连接在传感器固定座303上,激光测距传感器302发射激光与超声高频振动压头301方向夹角成90
°
,激光测距传感器302与超声高频振动压头301之间距离直线与超声高频振动压头301方向夹角成90
°
,激光测距传感器302的激光与超声高频振动压头301方向与激光与超声高频振动压头301左侧60
°
夹角直角三角形,当激光测距传感器302感受到工件时,超声高频振动压头301与工件的距离,是激光测距传感
器302激光长度的二分之一,确保了工作距离的统一,所述动平台 203下方设有自调平工作台4。
29.自调平工作台4设有固定底座401,固定底座401固定连接在横梁b105 中部,固定底座401下方固定连接支撑脚402,支撑脚402内安装有定向杆 403,定向杆403设有弹簧404,定向杆403一端穿过固定底座401固定连接台面405,弹簧404套设在定向杆403未穿过固定底座401的一端,弹簧 404无法穿过固定底座401,支撑脚402侧面固定连接调平控制模组406,调平控制模组406设有调平驱动电机407,调平驱动电机407连接有蜗轮及蜗杆409,蜗杆409顶部固定连接有半球型接触块,接触块接触台面405底部,调平驱动电机407与蜗轮及蜗杆409为啮合连接,调平驱动电机407 可驱动蜗杆409上下移动,当调平驱动电机407调节蜗杆409上移,弹簧 404挤压固定底座401,为台面405提供一个向下作用力。
30.可以理解的,所述调平驱动电机407与蜗轮及蜗杆409,传动方式可参考现有技术,调平驱动电机407可通过蜗轮驱动蜗杆409上下移动,在此不再对其具体连接原理结构进行赘述。
31.该装置运作过程:
32.将工件放在台面405上,调平控制模组406启动,对应调平驱动电机407启动,调平驱动电机407控制蜗杆409上移,顶着台面405调整至水平,弹簧404挤压固定底座,为台面405提供一个向下作用力,同时,并联机器人2启动,机器臂控制模组201上的驱动电机204,驱动丝杆205旋转,滑块206在滑轨106上移动,带动机械臂202移动,三组机器臂控制模组 201相互配合,调整动平台203,激光测距传感器302测量出超声高频振动压头301相对工件距离,达到合适开始加工,加工完成,机器臂控制模组 201复位,调平控制模组406复位,台面405受到弹簧404的作用力复位,完成加工流程。
33.以上仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。