1.本技术各实施例属自动化设备技术领域,更具体地说,是涉及一种自动导引的运输车。
背景技术:
2.agv(自动导引运输车)是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,自动导引运输车属于轮式移动机器人的范畴。随着社会的发展和科技的不断进步,尤其在工业4.0发展的大趋势下,国内广大的制造业,面临着升级改造的局面,随着车间内自动化程度的越来越高,为了节省车间内物料转运的人力,agv被广泛用于车间内物料的转运上,在快递运输行业中也有着广泛的使用。
3.现有技术中,agv一般结构比较复杂,不够紧凑,体积较大,且没有升降结构对运输的物料进行升降,使用不够方便。
技术实现要素:
4.本技术的目的在于提供一种自动导引运输车,至少解决或缓解现有技术中存在的问题。
5.为了实现上述的目的,本技术实施例提供的一种自动导引运输车,包括壳体,和设置在壳体中的升降机构,第一驱动机构和控制机构;
6.所述升降机构和第一驱动机构分别与所述控制机构连接,通过所述控制机构控制所述升降机构和所述第一驱动机构运动;
7.所述升降机构包括第二驱动机构和升降座,所述第二驱动机构与所述升降座连接,并驱动所述升降座进行升降运动,所述升降座顶端设置在壳体外侧并与待运输物料接触,所述第二驱动机构设置在所述壳体内且与所述控制机构连接。
8.作为本技术的优选实施例,所述第一驱动机构包括第一运动件、第一减速机构、第一动力机构和第一驱动器;
9.所述第一运动件与所述第一动力机构之间设置有第一减速机构,所述第一减速机构和第一驱动器设置在支撑件上,所述支撑件与所述固定件转动连接,所述第一驱动器与所述第一动力机构连接,并通过所述第一动力机构驱动所述第一运动件运动。
10.作为本技术的优选实施例,所述壳体底部设置有至少两个第二运动件,所述第一驱动机构通过所述第一运动件驱动所述第二运动件转动,并带动所述壳体运动。
11.作为本技术的优选实施例,所述第二驱动机构包括第二动力机构,第二减速机构和推动机构;
12.所述第二动力机构的输出轴与所述第二减速机构输入端连接,所述第二减速机构的输出端与所述推动机构连接,所述推动机构与所述升降座连接。
13.作为本技术的优选实施例,所述壳体上设有与所述第一驱动机构一一对应的固定
件,所述第一驱动机构与所述固定件转动连接。
14.作为本技术的优选实施例,所述壳体上还设置有触摸屏,所述触摸屏与所述控制机构连接,用于设置及显示所述自动导引运输车的运行状态。
15.作为本技术的优选实施例,在所述触摸屏的所在的壳体表面上设置有第一指示灯,所述第一指示灯用于指示自动导引运输车预运动方向。
16.作为本技术的优选实施例,所述壳体的侧面还设置有第二指示灯,所述第二指示灯与所述控制机构连接,用于指示自动导引运输车的运动状态。
17.作为本技术的优选实施例,在所述壳体中还设置有无线充电模块,所述无线充电模块与所述控制机构连接。
18.作为本技术的优选实施例,在所述壳体上还设置有扫描仪,所述扫描仪与所述控制机构连接,用于获取自动导引运输车所处环境信息以便构建环境地图。
19.本技术的有益效果:
20.与现有技术相比,本技术提出的自动导引运输车,包括壳体,和设置在壳体中的升降机构,第一驱动机构和控制机构所述升降机构包括第二驱动机构和升降座,所述第二驱动机构与所述升降座连接,并驱动所述升降座进行升降运动,所述升降座顶端设置在壳体外侧并与待运输物料接触,通过本技术的技术方案可以实现对运输物料进行升降,使用比较方便。
附图说明
21.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。后文将参照附图以示例性而非限制性的方式详细描述本技术的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分,本领域技术人员应该理解的是,这些附图未必是按比例绘制的,在附图中:
22.图1是本技术实施例的结构示意图;
23.图2是本技术实施例的仰视图;
24.图3是本技术实施例的去掉上盖后的结构示意图;
25.图4是本技术实施例的俯视爆炸图;
26.图5是本技术实施例的仰视爆炸图;
27.图6是本技术实施例的第一驱动机构的结构示意图;
28.图7是本技术实施例的第一驱动机构的爆炸图;
29.图8是本技术实施例的升降机构的结构示意图;
30.图9是本技术实施例的基体的结构示意图。
31.附图明细:
[0032]1‑
壳体,2
‑
第一驱动机构,3
‑
升降机构,4
‑
电池,5
‑
扫描仪,6
‑
触摸屏,7
‑
第二运动件,8
‑
无线充电模块,9
‑
指示灯,10
‑
减震装置,11
‑
基体,12
‑
前罩,13
‑
侧罩,14
‑
后罩,15
‑
上盖,16
‑
下盖,21
‑
第一运动件,22
‑
连接盘,23
‑
第一减速机构,24
‑
安全编码器,25
‑
第一动力机构,26
‑
第一驱动器,28
‑
支撑件,31
‑
安装座,32
‑
推动机构,33
‑
固定螺母,34
‑
升降座,35
‑
第二动力机构,36
‑
第二减速机构,111
‑
c型结构,112
‑
筋板,113
‑
固定件。
具体实施方式
[0033]
为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
[0034]
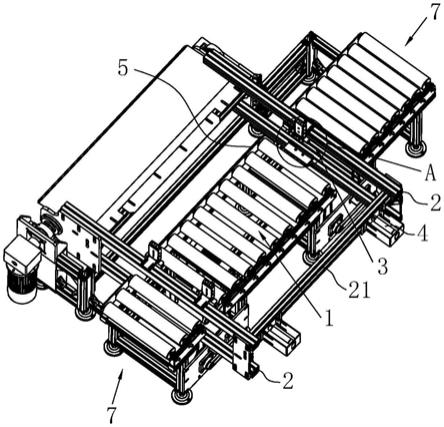
如图1
‑
3所示,在本技术的一具体实施例中,提出了一种自动导引运输车,包括壳体1,和设于壳体1中的升降机构3,第一驱动机构2,控制机构(图中未画出),升降机构3和第一驱动机构2分别与控制机构连接,通过控制机构控制升降机构3和第一驱动机构2的运动;
[0035]
所述升降机构3包括第二驱动机构和升降座34,所述第二驱动机构与所述升降座34连接,并驱动所述升降座34进行升降运动,所述升降座34的顶端设置在壳体1外侧并与待运输物料接触,所述第二驱动机构设置在所述壳体1内且与所述控制机构连接。
[0036]
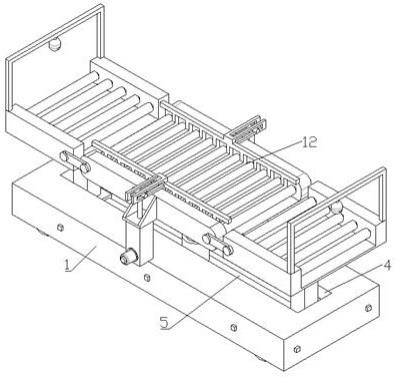
如图1、3所示,在本技术一优选方案中,升降机构3设有四个,四个升降机构3对称设置在壳体1内靠近角部位置。使用时,可以将其中相邻两升降座34为一组,进行长边顶升或窄边顶升,亦可将四个升降座34为一组,进行环形顶升或平面顶升,方式灵活多变,适用性更加广阔。升降座34上也可以放置托板使用。
[0037]
如图8所示,所述第二驱动机构包括安装座31,推动机构32,固定螺母33,第二动力机构35和第二减速机构36,所述第二动力机构35,第二减速机构36,推动机构32和升降座34依次连接,所述第二动力机构35通过第二减速机构36和推动机构32驱动升降座34升降,所述升降座34升起时,可远离壳体1表面并将物料托起,在本技术实施例中,升降机构3为顶升电缸,第二动力机构35为电机。
[0038]
具体地,第二动力机构35的法兰盘和外伸轴与第二减速机构36的输入端相连,第二减速机构36的输出端与安装座31的输入端相连,安装座31的输出端与推动机构32相连,推动机构32的推杆与升降座34相连,并用固定螺母33固定。
[0039]
如图5
‑
7、9所示,所述第一驱动机构2具有二个,所述的二个第一驱动机构2对称设于壳体1内中部的两侧,所述壳体1上设有与第一驱动机构2一一对应的固定件113,所述第一驱动机构2与固定件113转动连接。
[0040]
如图6
‑
7所示,第一驱动机构2包括第一运动件21、连接盘22、第一减速机构23、安全编码器24、第一动力机构25、第一驱动器26、支撑件28;第一运动件21用于与地面接触并带动第二运动件7同步转动。
[0041]
第一运动件21与所述第一动力机构25之间设置有第一减速机构23,所述第一减速机构23和第一驱动器26设置在支撑件28上,所述支撑件28与所述固定件113转动连接,所述第一驱动器26与所述第一动力机构25连接,并通过所述第一动力机构25驱动所述第一运动件21运动。
[0042]
如图6
‑
7所示,第一驱动机构2上还设有减震装置10,每个驱动机构2上各设有一个减震装置10,所述减震装置10的一端与支撑件28连接,减震装置10的另一端与壳体1连接。
[0043]
所述减震装置10为氮气弹簧,市面上常见的减震方式是弹簧加套筒或弹簧加导柱的弹簧减震方式,特点是结构简单,造价便宜;同时,缺点也很明显,当车启动和停止时,由于弹簧在纵向刚性弱,车体会上下起伏和前后摇晃,影响精度,延长停车稳定时间。本技术
采用的氮气弹簧在纵向刚性较好,很好地解决了普通弹簧在纵向刚性弱地缺点,较一般的弹簧减震方式,运输车启动和停止更平稳,稳定停止时间更短。
[0044]
具体地,支撑件28套设在壳体1上的固定件113上,并可绕固定件113的轴心线转动;第一动力机构25的法兰盘与第一减速机构23的输入端法兰相连;第一减速机构23的输出端与连接盘22相连,连接盘的外圈与第一运动件21相连;减震装置10(氮气弹簧)的固定端与壳体1相连,伸出端与支撑件28相连;第一驱动器26固定在支撑件28上;第一减速机构23输出轴的另外一端与安全编码器24相连。
[0045]
通过第一动力机构25旋转,经过第一减速机构23将扭矩放大,带动第一运动件21转动,通过与地面的摩擦力将壳体1向前驱动;减震装置10的作用是当遇到地面轻微的起伏不平时,能够保证第一运动件21始终与地面压紧,并具有缓冲、减震作用。安装在第一减速机构23输出端与之同轴的安全编码器24,能够读取第一减速机构23输出端圈数信息,圈数数据与第一动力机构25自带编码器数据相比较,能够精准控制第一运动件21的转速,具备双重安全功能。
[0046]
如图2所示,所述壳体1上还设置有至少两个第二运动件7,所述第一驱动机构2通过所述第一运动件21驱动所述第二运动件7转动,并带动所述壳体1运动。
[0047]
在本技术一优选方案中,第二运动件7为两个,两个第二运动件7可设于第一驱动机构2的同侧。
[0048]
在本技术另一优选方案中,第二运动件7设有四个,四个第二运动件7对称设置在壳体1底部靠近四个角的位置,第一驱动机构2的两侧各设有两个第二运动件7,第二运动件7为万向轮,可以使得运输车灵活转动,当然,第二运动件7也可以设置为多个,多个第二运动件7间隔均匀分布在壳体1的底部位置,所述控制机构通过第一驱动机构2驱动多个第二运动件7转动并带动壳体1运动。
[0049]
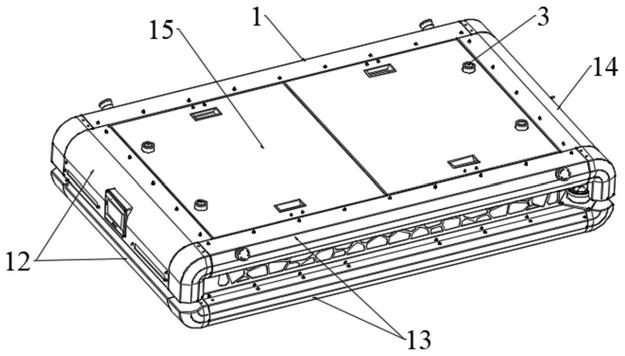
如图3所示,所述壳体1上还设有触摸屏6,触摸屏6设于壳体前端表面并与控制机构连接,用于设置及显示所述自动导引运输车的运行状态。
[0050]
在所述触摸屏6的所在的壳体1表面上设置有第一指示灯,所述第一指示灯用于指示自动导引运输车预运动方向。
[0051]
如图3所示,所述壳体1的侧面还设置有第二指示灯9,所述第二指示灯9与所述控制机构连接,用于指示自动导引运输车的运动状态,提醒附近的人员注意避让,或者,故障时报警等。
[0052]
壳体1的两个侧面上均设有第二指示灯9,每个侧面至少设有一个第二指示灯9,第二指示灯9的周围设置有指示灯罩,所述指示灯罩与所述壳体1固定连接。
[0053]
如图2所示,在所述壳体1中还设置有无线充电模块8,所述无线充电模块8与所述控制机构连接,具体设置在壳体1底部的后端位置。
[0054]
所述无线充电模块8上设有无线充电线圈,所述控制机构包括多个电池4,通过所述无线充电模块8,可对所述电池4进行充电。电池4为可充电的电池,电池4也可以是一组电池组成的电池组。无线充电模块8上还设有充电插座,可进行有线充电。
[0055]
如图3
‑
4所示,在所述壳体1上还设置有扫描仪5,所述扫描仪5与所述控制机构连接,用于获取自动导引运输车所处环境信息以便构建环境地图,扫描仪5共设有两个,分别设于壳体1的对角位置上。扫描仪5优选为激光扫描仪。
[0056]
如图1
‑
5、9所示,所述壳体1包括基体11,前罩12,后罩14,二个侧罩13,上盖15和下盖16;所述前罩12与基体11前端连接,后罩14与基体11后端连接,二个侧罩13分别与基体11的两侧连接,上盖15与基体11顶端连接,下盖16与基体11底端连接,其中,前罩12、后罩14及侧罩13分别包括上下两个部件,所述基体11内的两侧中部位置分别设有与驱动机构2配合的c型结构111,该c型结构111用于容置第一驱动机构2上的第一运动件21(参考图6),所述c型结构111由钣金一体折弯焊接成型,结构强度较好,所述基体11内设有多个筋板112,壳体1的基体11上位于c型结构111的上方设有与第一驱动机构2对应配合的固定件113,固定件113穿设于第一驱动机构2,固定件113为圆柱状。壳体1为长方体结构,基体11采用钣金焊接成型。
[0057]
本技术提供的自动导引运输车通过激光扫描仪雷达导航,自行构建地图,车间不需铺设任何辅助性引导物(磁条、二维码等);初始时,激光扫描仪,将车间环境扫描完,构建地图;行驶时,按照规定的路线进行行驶,并能够规避障碍物;运行到料架下方,四个升降机构3同时作用将料架顶起,并运行到指定地点,将料架放下;当电量不足时,自行行驶到充电区通过无线充电模块8进行无线或有线充电。
[0058]
最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。