1.本实用新型涉及保温杯结构技术领域,尤其是指带把手保温杯的固定螺母焊接装置。
背景技术:
2.在保温杯制造领域,带把手的保温杯需要将把手的固定螺母进行焊接定位,传统螺母焊接都是用手工点焊工艺,这样会造成焊点位置不统一,焊点过大,造成无法装配且影响美观,同时传统焊接强光刺眼,对人体的健康存在一定的危害。
3.为了能够实现保温杯与把手螺母的自动焊接,可以入一种焊接装置。
技术实现要素:
4.本实用新型为克服上述情况不足,旨在提供一种能解决上述问题的技术方案。
5.带把手保温杯的固定螺母焊接装置,包括工作台,工作台上设置有运输装置、夹持装置、点焊装置;运输装置包括有进料轨道、焊接轨道、出料轨道,进料轨道与出料轨道为直线,焊接轨道为弧形,且进料轨道、焊接轨道、出料轨道依次首尾相连;夹持装置包括有保温杯夹具与把手夹具;保温杯夹具安装在运输装置上,把手夹具安装在焊接轨道切点位置侧部;点焊装置包括有第一机械手、第二机械手,且第一机械手、第二机械手分别安装焊接轨道两侧;焊接轨道切点位置处设置有感应装置。
6.进一步地,保温杯夹具包括有第一底座,第一底座上端设置有圆环,圆环内部阵列设置有压块,压块后端两侧部设置有导柱,圆环上设置有配合导柱使用的套环。
7.进一步地,圆环与压块之间设置有弹簧。
8.进一步地,把手夹具包括有第二底座,第二底座上端设置有立杆,立杆侧部设置有伸缩杆,伸缩杆端部设置有夹持部。
9.进一步地,第一机械手、第二机械手均包括有第三底座,第三底座上端设置有万向球体,万向球体上端设置有第一摆臂,第一摆臂上端设置有第二摆臂,第二摆臂上端设置有焊接头。
10.本实用新型的有益效果是:带把手保温杯的固定螺母焊接装置,带把手保温杯的固定螺母焊接装置,包括工作台,工作台上设置有运输装置、夹持装置、点焊装置;运输装置包括有进料轨道、焊接轨道、出料轨道,出料轨道与出料轨道为直线,焊接轨道为弧形,且进料轨道、焊接轨道、出料轨道依次首尾相连;夹持装置包括有保温杯夹具与把手夹具;保温杯夹具安装在运输装置上,把手夹具安装在焊接轨道切点位置侧部;点焊装置包括有第一机械手、第二机械手,且第一机械手、第二机械手分别安装在把手夹具与焊接轨道切点位置之间两侧部;通过工作台可放置运输装置、夹持装置、点焊装置,在运输装置作用下,可实现对杯体的运输,在夹持装置,可实现对杯体以及把手的夹持固定,在点焊装置作用下,可实现杯体与把手的焊接;该装置动作为:在出料轨道作用下,可使得杯体进入并移动至焊接轨道处;在焊接轨道切点位置处设置有感应装置,可用于感应有无杯体,并在切点处进行焊
接,由夹持部对把手进行夹持,并在伸缩杆作用下,使得把手与杯体接触,而在第一机械手、第二机械手上的焊接头作用下,可分别同步对把手与杯体进行焊接处理,从而加快焊接,焊接完成过后,由出料导轨对焊接好了的杯体与把手进行出料运输。
11.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
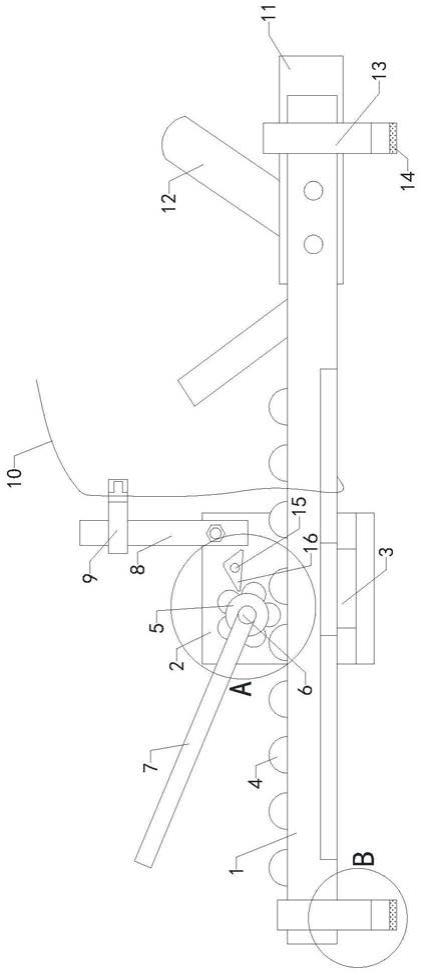
12.图1为本实用新型的结构示意图。
13.图2为保温杯夹具结构示意图。
14.图3为把手夹具结构示意图。
15.图4为第一机械手或第二机械手结构示意图。
16.图中附图标识分别为:工作台
‑
1、运输装置
‑
2、夹持装置
‑
3、点焊装置
‑
4、感应装置
‑
5、进料轨道
‑
21、焊接轨道
‑
22、出料轨道
‑
23、保温杯夹具
‑
31、把手夹具
‑
32、第一机械手
‑
41、第二机械手
‑
42、第一底座
‑
311、圆环
‑
312、压块
‑
313、导柱
‑
314、套环
‑
315、弹簧
‑
316、第二底座
‑
321、立杆
‑
322、伸缩杆
‑
323、夹持部
‑
324、第三底座
‑
43、万向球体
‑
44、第一摆臂
‑
45、第二摆臂
‑
46、焊接头
‑
47。
具体实施方式
17.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅图1~4,带把手保温杯的固定螺母焊接装置,带把手保温杯的固定螺母焊接装置,包括工作台1,工作台1上设置有运输装置2、夹持装置3、点焊装置4;运输装置2包括有进料轨道21、焊接轨道22、出料轨道23,进料轨道21与出料轨道23为直线,焊接轨道22为弧形,且进料轨道21、焊接轨道22、出料轨道23依次首尾相连;夹持装置3 包括有保温杯夹具31与把手夹具32;保温杯夹具31安装在运输装置2 上,把手夹具32安装在焊接轨道22切点位置侧部;点焊装置4包括有第一机械手41、第二机械手42,且第一机械手41、第二机械手42分别安装在把手夹具32与焊接轨道22切点位置之间两侧部;通过工作台1 可放置运输装置2、夹持装置3、点焊装置4,在运输装置2作用下,可实现对杯体的运输,在夹持装置3,可实现对杯体以及把手的夹持固定,在点焊装置4作用下,可实现杯体与把手的焊接;该装置动作为:在出料轨道23作用下,可使得杯体进入并移动至焊接轨道22处;在焊接轨道22切点位置处设置有感应装置5,可用于感应有无杯体,并在切点处进行焊接,由夹持部324对把手进行夹持,并在伸缩杆323作用下,使得把手与杯体接触,而在第一机械手41、第二机械手42上的焊接头47作用下,可分别同步对把手与杯体进行焊接处理,从而加快焊接,焊接完成过后,由出料导轨对焊接好了的杯体与把手进行出料运输。
19.保温杯夹具31包括有第一底座311,第一底座311上端设置有圆环312,圆环312内部阵列设置有压块313,压块313后端两侧部设置有导柱314,圆环312上设置有配合导柱314使用的套环315;压块313后端中间位置设置有弹簧316,弹簧316安装在圆环312与压块313
之间,在导柱314与套环315作用下,可使得压块313原理圆环312中心,便于放置杯体,而在弹簧316作用下,可使得对圆环 312内的杯体进行固定夹持。
20.把手夹具32包括有第二底座321,第二底座321上端设置有立杆322,立杆322侧部设置有伸缩杆323,伸缩杆323端部设置有夹持部324,夹持部324用于夹持把手,并在伸缩杆323作用下,可使得夹持部324靠近或是远离杯体。
21.第一机械手41、第二机械手42均包括有第三底座43,第三底座 43上端设置有万向球体44,万向球体44上端设置有第一摆臂45,第一摆臂45上端设置有第二摆臂46,第二摆臂46上端设置有焊接头47,在万向球、第一摆臂45、第二摆臂46作用下,增加焊接头 47的移动,便于适配杯体与把手的接触点。
22.焊接轨道22切点位置处设置有感应装置5,感应装置5可在焊接位置处感应有无杯体。
23.以上所述,仅是本实用新型较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型以较佳实施例公开如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当利用上述揭示的技术内容作出些许变更或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型技术是指对以上实施例所作的任何简单修改、等同变化与修饰,均属于本实用新型技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。