技术特征:
1.一种基于多关节的快速理料机器人,其特征在于,包括:支架;摆臂系统,所述摆臂系统包括运算控制器、第一摆臂和第二摆臂,所述第一摆臂和第二摆臂相互转动连接且均水平布置,所述第一摆臂的一端与支架转动连接;摆臂控制组件,所述摆臂控制组件包括第一电机、大带轮、小带轮和第一皮带,所述大带轮与支架固定连接并且位于第一摆臂与支架连接的一端处,所述小带轮位于第一摆臂与第二摆臂转动连接处且与第二摆臂固定连接,所述第一皮带安装于大带轮和小带轮上,所述第一电机固定于支架上并且第一电机的主轴与第一摆臂与支架转动连接的一端固定连接;升降抓取组件,所述升降抓取组件位于第二摆臂上并与第二摆臂转动连接,用于升降抓取产品;抓取转动驱动,所述抓取转动驱动与升降抓取组件连接,用于控制升降抓取组件转动,从而调整升降抓取组件吸取产品的水平角度和放置产品的水平角度;视觉相机,所述视觉相机安装在支架上,并通过接口和运算控制器连接。2.根据权利要求1所述的一种基于多关节的快速理料机器人,其特征在于:所述升降抓取组件包括气缸、抓取座和若干吸盘,所述气缸与第二摆臂固定连接,所述抓取座与气缸的活塞杆转动连接,并且抓取转动驱动与抓取座连接,若干吸盘均固定于抓取座上。3.根据权利要求2所述的一种基于多关节的快速理料机器人,其特征在于:所述抓取转动驱动包括第二电机、第一中间传动组件、第二中间传动组件和滑移传动组件,所述第二电机固定于支架上,所述第一中间传动组件设置于第一摆臂上,所述第二中间传动组件设置于第二摆臂上,所述滑移传动组件包括驱动杆和滑移套,所述驱动杆与滑移套周向固定且轴向滑动链接,所述第二电机、第一中间传动组件、第二中间传动组件和驱动杆依次连接,所述滑移套与抓取座固定连接。4.根据权利要求3所述的一种基于多关节的快速理料机器人,其特征在于:所述第一中间传动组件包括第一带轮、第二带轮和第一传动带,所述第一带轮和第二带轮均转动连接于第一摆臂上,所述第一传动带安装于第一带轮和第二带轮上,所述第二中间传动组件包括第三带轮、第四带轮和第二传动带,所述第三带轮和第四带轮均转动连接于第二摆臂上,所述第二传动带安装于第三带轮和第四带轮上,所述第一带轮与第二电机的主轴连接,所述第二带轮和第三带轮固定连接,所述第四带轮与驱动杆固定连接。5.根据权利要求4所述的一种基于多关节的快速理料机器人,其特征在于:所述第一摆臂和第二摆臂内部均中空,所述大带轮、小带轮、第一皮带、第一带轮、第二带轮和第一传动带均位于第一摆臂内,所述第三带轮、第四带轮和第二传动带均位于第二摆臂内。6.根据权利要求3所述的一种基于多关节的快速理料机器人,其特征在于:所述第一电机和第二电机均竖直倒置设置于支架上,所述第一摆臂和第二摆臂能够相互重合重叠。7.根据权利要求2所述的一种基于多关节的快速理料机器人,其特征在于:所述第二摆臂上固定有导向架,所述抓取座与导向架竖向滑动连接。
技术总结
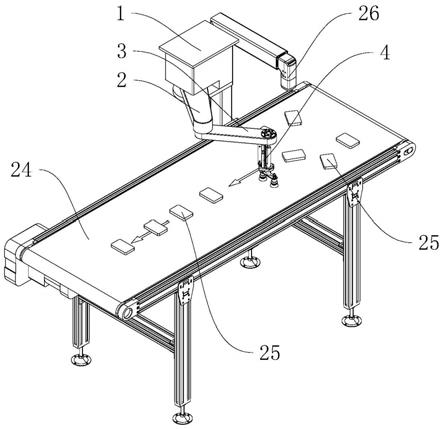
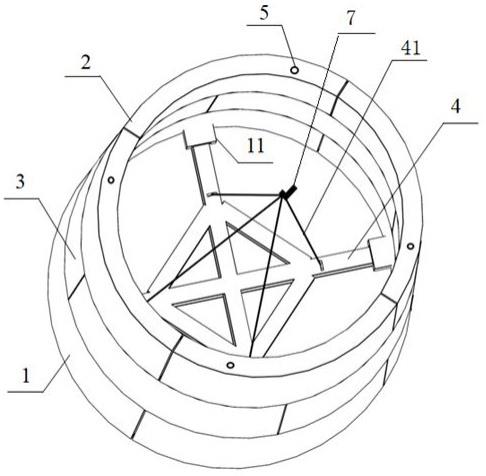
本发明公开了一种基于多关节的快速理料机器人,包括支架、运算控制器、视觉相机、第一摆臂、第二摆臂、摆臂控制组件、升降抓取组件和抓取转动驱动,第一摆臂和第二摆臂相互转动连接且均水平布置,第一摆臂的一端与支架转动连接,摆臂控制组包括第一电机、大带轮、小带轮和第一皮带,大带轮与支架固定连接并且位于第一摆臂与支架连接处,小带轮固定于第二摆臂上,第一皮带安装于大带轮和小带轮上,第一电机固定于支架上并与第一摆臂连接,升降抓取组件位于第二摆臂上并与第二摆臂转动连接,抓取转动驱动与升降抓取组件连接;本发明提供了一种基于多关节的快速理料机器人,结构简单,运行速度快,能够对输送线上的物料快速进行理料排序。序。序。
技术研发人员:朱海鸿
受保护的技术使用者:优爱宝智能机器人技术(浙江)有限公司
技术研发日:2021.09.09
技术公布日:2021/11/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。