技术特征:
1.一种移动体的操纵装置,该操纵装置能够进行使移动体移动的操纵,其特征在于,所述移动体的操纵装置具备:上身支承部,其佩戴于操纵者的上身,以能够伴随该操纵者移动而与该操纵者一起移动;以及移动指令决定部,其根据所述操纵者的移动环境中的包括所述上身支承部的移动位置及移动速度中的至少一方在内的该上身支承部的运动状态的观测值,来决定所述移动体的规定的代表点的移动控制用指令值。2.根据权利要求1所述的移动体的操纵装置,其特征在于,所述移动体的操纵装置还具备:上身支承部驱动机构,其安装于所述上身支承部,以能够对该上身支承部赋予使该上身支承部移动的力;以及第一控制部,其根据所述上身支承部从所述操纵者的上身接受的反作用力即上身支承部反作用力的观测值、以及所述操纵者的上身相对于所述上身支承部产生的相对位移即操纵者上身相对位移的观测值中的任意观测值,来控制所述上身支承部驱动机构的动作。3.根据权利要求2所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值来控制所述上身支承部驱动机构的动作,以将所述上身支承部反作用力中的至少横向的平移力维持为零。4.根据权利要求3所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值来控制所述上身支承部驱动机构的动作,以将所述上身支承部反作用力中的至少横向的平移力维持为零、并且同时将所述上身支承部反作用力中的上下方向的平移力维持为规定值。5.根据权利要求1所述的移动体的操纵装置,其特征在于,所述移动体的操纵装置还具备:上身支承部驱动机构,其安装于所述上身支承部,以能够对该上身支承部赋予使该上身支承部移动的力;以及第一控制部,其根据所述上身支承部从所述操纵者的上身接受的反作用力即上身支承部反作用力的观测值及所述操纵者的上身相对于所述上身支承部产生的相对位移即操纵者上身相对位移的观测值中的任意观测值、以及第一反作用力的观测值,来控制所述上身支承部驱动机构的动作,所述第一反作用力是所述移动体在其移动环境下除了从地板面接受的反作用力以外从外界接受的反作用力。6.根据权利要求5所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第一反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第一反作用力而得到的力中的至少横向的平移力维持为零。7.根据权利要求6所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第一反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第一反作用力而得到的力中的至少横向的平移力维持为零、并且同时将线性组合上身支承部反作用力和所述第一反作用力而得到的力中的上下方向的平移力维持为规定值。
8.根据权利要求6所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第一反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第一反作用力而得到的力中的横向的平移力维持为零、并且同时将所述上身支承部反作用力中的上下方向的平移力维持为规定值。9.根据权利要求1所述的移动体的操纵装置,其特征在于,所述移动体的操纵装置还具备:上身支承部驱动机构,其安装于所述上身支承部,以能够对该上身支承部赋予使该上身支承部移动的力;操纵用机械手,其安装于所述上身支承部驱动机构,能够供所述操纵者佩戴,以便通过双边控制来操纵设置于所述移动体的作业用机械手;以及第一控制部,其根据所述上身支承部从所述操纵者的上身接受的反作用力即上身支承部反作用力的观测值及所述操纵者的上身相对于所述上身支承部产生的相对位移即操纵者上身相对位移的观测值中的任意观测值、以及第二反作用力的观测值来控制所述上身支承部驱动机构的动作,所述第二反作用力是所述操纵用机械手从所述操纵者接受的反作用力。10.根据权利要求9所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第二反作用力而得到的力中的至少横向的平移力维持为零。11.根据权利要求10所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第二反作用力而得到的力中的至少横向的平移力维持为零、并且同时将线性组合所述上身支承部反作用力和所述第二反作用力而得到的力中的上下方向的平移力维持为规定值。12.根据权利要求10所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第二反作用力而得到的力中的横向的平移力维持为零、并且同时将所述上身支承部反作用力中的上下方向的平移力维持为规定值。13.根据权利要求1所述的移动体的操纵装置,其特征在于,所述移动体的操纵装置还具备:上身支承部驱动机构,其安装于所述上身支承部,以能够对该上身支承部赋予使该上身支承部移动的力;操纵用机械手,其安装于所述上身支承部驱动机构,能够供所述操纵者佩戴,以便通过双边控制来操纵设置于所述移动体的作业用机械手;以及第一控制部,其根据所述上身支承部从所述操纵者的上身接受的反作用力即上身支承部反作用力的观测值及所述操纵者的上身相对于所述上身支承部产生的相对位移即操纵
者上身相对位移的观测值中的任意观测值、第一反作用力的观测值、以及第二反作用力的观测值来控制所述所述上身支承部驱动机构的动作,所述第一反作用力是所述移动体在其移动环境下除了从地板面接受的反作用力以外从外界接受的反作用力,所述第二反作用力是所述操纵用机械手从所述操纵者接受的反作用力。14.根据权利要求13所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值、所述第一反作用力的观测值及所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力、所述第一反作用力及所述第二反作用力而得到的力中的至少横向的平移力维持为零。15.根据权利要求14所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值、所述第一反作用力的观测值及所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力、所述第一反作用力及所述第二反作用力而得到的力中的至少横向的平移力维持为零、并且同时将线性组合所述上身支承部反作用力、所述第一反作用力及所述第二反作用力而得到的力中的上下方向的平移力维持为规定值。16.根据权利要求14所述的移动体的操纵装置,其特征在于,所述第一控制部构成为根据所述上身支承部反作用力的观测值、所述第一反作用力的观测值及所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力、所述第一反作用力及所述第二反作用力而得到的力中的横向的平移力维持为零、并且同时将所述上身支承部反作用力中的上下方向的平移力维持为规定值。17.根据权利要求2、3、5、6、9、10、13、14中任一项所述的移动体的操纵装置,其特征在于,所述上身支承部驱动机构具备构成为能够在所述操纵者移动的地板面上移动的移动机构、以及能够产生该移动机构相对于该地板面的移动驱动力的第一致动器,所述上身支承部搭载于所述移动机构,以能够与该移动机构一起移动,所述第一控制部构成为通过所述第一致动器的控制来控制所述上身支承部驱动机构的动作。18.根据权利要求4、7、8、11、12、15、16中任一项所述的移动体的操纵装置,其特征在于,所述上身支承部驱动机构具备构成为能够在所述操纵者移动的地板面上移动的移动机构、能够产生该移动机构相对于该地板面的移动驱动力的第一致动器、将所述上身支承部支承为能够相对于所述移动机构升降的升降机构、以及能够产生使该上身支承部相对于所述移动机构升降的驱动力的第二致动器,所述第一控制部构成为通过所述第一致动器及第二致动器的控制来控制所述上身支承部驱动机构的动作。19.根据权利要求2、3、5、6、9、10、13、14、17中任一项所述的移动体的操纵装置,其特征在于,所述上身支承部以成为在上下方向上移动自如的状态的方式安装于所述上身支承部
驱动机构。20.根据权利要求2、3、5、6、9、10、13、14、17中任一项所述的移动体的操纵装置,其特征在于,所述上身支承部以能够在上下方向上弹性移动的方式安装于所述上身支承部驱动机构。21.根据权利要求2~20中任一项所述的移动体的操纵装置,其特征在于,所述上身支承部以成为在所述操纵者的侧倾方向上、或在所述操纵者的俯仰方向上、或在该侧倾方向和该俯仰方向上旋转自如的状态的方式安装于所述上身支承部驱动机构。22.一种操纵系统,其特征在于,所述操纵系统具备权利要求5~8、13~16中任一项所述的移动体的操纵装置、以及所述移动体,所述移动体具有构成为能够在其移动环境的地板面上移动的移动体用移动机构、以及经由所述第一反作用力的检测用的力检测器而搭载于该移动体用移动机构的上身部。23.根据权利要求22所述的操纵系统,其特征在于,所述上身部具备对所述移动体用移动机构的周围进行覆盖的罩。
技术总结
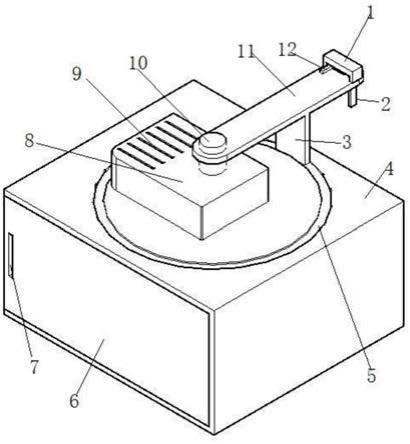
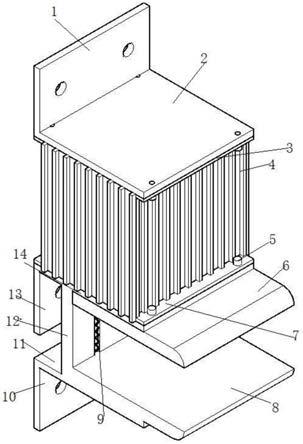
操纵装置(51)(主动装置)具备:上身支承部(65),其佩戴于操纵者(P)的上身,以能够伴随操纵者(P)移动而与操纵者(P)一起移动;以及移动指令决定部(94),其根据操纵者(P)的移动环境中的包含上身支承部(65)的移动速度的运动状态的观测值来决定移动体(1)(从动装置)的移动控制用指令值。通过操纵装置(51)的移动机构(52)及升降机构(60)的动作控制从而能够控制上身支承部(65)从操纵者(P)接受的反作用力。上身支承部(65)从操纵者(P)接受的反作用力。上身支承部(65)从操纵者(P)接受的反作用力。
技术研发人员:竹中透
受保护的技术使用者:本田技研工业株式会社
技术研发日:2020.03.18
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。