1.本发明涉及操纵移动体的装置。
背景技术:
2.作为对机器人等移动体进行操纵的装置,已知有例如专利文献1、2所示的装置。该操纵装置具有:鞍座(saddle),其以能够移动的方式支承于上身支承机构;以及脚板支承机构,其佩戴于坐在该鞍座上的操纵者的左右脚。而且,该操纵装置通过操纵者以进行步行动作的方式移动脚板支承机构,从而通过双边控制来进行作为移动体的机器人的两腿的运动(步行运动),进而使该机器人移动。
3.另外,作为移动体的操纵装置,一般也已知操纵者用手进行操纵操作的遥控器。
4.在先技术文献
5.专利文献
6.专利文献1:日本特开平10
‑
217159号公报
7.专利文献2:美国专利5841258号说明书
技术实现要素:
8.然而,在专利文献1所示的操纵装置中,由于存在上身支承机构和脚板支承机构这双方的机构而需要多个致动器,因此操纵装置容易成为结构复杂而昂贵的装置。而且,在操纵装置中具备使移动体的臂等进行作业的机械手的情况下,容易招致该操纵装置的大幅的复杂化、高成本化。
9.另外,操纵者在坐于鞍座的状态下移动脚板支承机构,因此该移动的方式容易与操纵者实际步行时两脚的移动方式不同。进而,移动体的移动速度、移动方向相对于操纵者设想的移动速度、移动方向容易产生偏移。
10.另外,在由遥控器进行的移动体的操纵中,需要操纵者事先充分地识别遥控器的操作与移动体的动作之间的对应关系,因此为了使移动体的期望的动作进行而需要高度的熟练。因此,难以使移动体的期望的动作稳定地进行。
11.本发明是鉴于这样的背景而完成的,其目的在于提供一种能够以简易的结构恰当地进行移动体的操纵的操纵装置。
12.为了达到上述的目的,本发明(第一发明)的移动体的操纵装置能够进行使移动体移动的操纵,其特征在于,
13.所述移动体的操纵装置具备:
14.上身支承部,其佩戴于操纵者的上身,以能够伴随该操纵者移动而与该操纵者一起移动;以及
15.移动指令决定部,其根据所述操纵者的移动环境中的包括所述上身支承部的移动位置及移动速度中的至少一方在内的该上身支承部的运动状态的观测值,来决定所述移动体的规定的代表点的移动控制用指令值。
16.需要说明的是,在本说明书中,任意的物体的运动、反作用力等任意的状态量的“观测值”是指由适当的检测器或者传感器检测的该状态量的检测值、或者根据与该状态量具有一定的相关关系的其他的1个以上的状态量的检测值并基于该相关关系而推定出的推定值、或者能够视作与该状态量的实际的值一致或者大致一致的疑似的推定值。在该情况下,作为疑似的推定值,也能够使用该状态量的目标值。
17.根据上述第一发明,操纵者在将所述上身支承部佩戴于自身的上身的状态下移动,由此根据其移动时的上身支承部的运动状态(包括移动位置及移动速度中的至少一方在内的运动状态),来决定移动体的规定的代表点的移动控制用指令值。因此,操纵者仅通过自身相对于移动体以希望的移动速度、路径移动,就能够进行移动体的移动动作。另外,具备上述上身支承部和移动指令决定部的本发明的操纵装置能够不需要复杂的结构而构筑。
18.因而,根据第一发明的操纵装置,能够以简易的结构恰当地进行移动体的操纵。
19.在上述第一发明中,能够采用如下方案(第二发明):
20.所述移动体的操纵装置还具备:
21.上身支承部驱动机构,其安装于所述上身支承部,以能够对该上身支承部赋予使该上身支承部移动的力;以及
22.第一控制部,其根据所述上身支承部从所述操纵者的上身接受的反作用力即上身支承部反作用力的观测值和所述操纵者的上身相对于所述上身支承部产生的相对位移即操纵者上身相对位移的观测值中的任意观测值,来控制所述上身支承部驱动机构的动作。
23.据此,在操纵者移动时,能够将所述上身支承部反作用力或所述操纵者上身相对位移控制为期望的状态。
24.进行补充说明,第二发明中的上身支承部反作用力等本发明中的“反作用力”也可以是由作为三维向量的平移力和力的力矩这双方构成的力、以及由特定方向上的平移力和特定方向上的力的力矩中的一方或双方构成的力中的任意力。
25.另外,在以后的本发明的说明中,“横向”是指水平方向、或者大致水平的方向,“上下方向”是指铅垂方向、或者大致铅垂的方向。
26.在上述第二发明中,能够采用如下方案(第三发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值来控制所述上身支承部驱动机构的动作,以将所述上身支承部反作用力中的至少横向的平移力维持为零。
27.据此,操纵者能够在不从佩戴于自身的上身的上身支承部接受横向的反作用力的状态、或者几乎不接受横向的反作用力的状态下移动。进而,操纵者不会感到对自身的上身的横向的阻力感,能够为了移动体的操纵而在地板面上移动。
28.在上述第三发明中,能够采用如下方案(第四发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值来控制所述上身支承部驱动机构的动作,以将所述上身支承部反作用力中的至少横向的平移力维持为零、并且同时将所述上身支承部反作用力中的上下方向上的平移力维持为规定值。需要说明的是,作为上述与上下方向上的平移力相关的“规定值”,例如能够采用零、或者以使该平移力朝下的方式从零偏移的值。这样,在后述的第七发明、第八发明、第十一发明、第十二发明、第十五发明及第十六发明中也同样。
29.根据第四发明,操纵者能够在不仅不从佩戴于自身的上身的上身支承部接受横向
的反作用力也不接受上下方向上的反作用力的状态、或者大体不接受上下方向上的反作用力的状态、或者减轻用于支撑作用于自身的重力的力的状态下移动。进而,操纵者能够在与未将上身支承部佩戴于上身的状态的通常的步行时同样的感觉下、或者减轻了相对于重力产生的自身的腿的负荷的状态下,为了移动体的操纵而在地板面上移动。
30.另外,在所述第一发明中,也能够采用如下方案(第五发明):
31.所述移动体的操纵装置还具备:
32.上身支承部驱动机构,其安装于所述上身支承部,以能够对该上身支承部赋予使该上身支承部移动的力;以及
33.第一控制部,其根据所述上身支承部从所述操纵者的上身接受的反作用力即上身支承部反作用力的观测值及所述操纵者的上身相对于所述上身支承部产生的相对位移即操纵者上身相对位移的观测值中的任意观测值、以及第一反作用力的观测值,来控制所述上身支承部驱动机构的动作,所述第一反作用力是所述移动体在其移动环境下除了从地板面接受的反作用力以外从外界接受的反作用力。
34.据此,能够反映作用于移动体的所述第一反作用力的状态而将所述上身支承部反作用力或所述操纵者上身相对位移控制为期望的状态。
35.在上述第五发明中,能够采用如下方案(第六发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第一反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第一反作用力而得到的力中的至少横向的平移力维持为零。
36.据此,能够在移动体上未作用所述第一反作用力的状态下,起到与所述第三发明同样的效果。另外,在起因于移动体与外界的障碍物接触等而在该移动体作用了包含横向的平移力在内的所述第一反作用力的情况下,从上身支承部向操纵者的上身作用与该第一反作用力中的横向的平移力相应的大小的横向的平移力。由此,操纵者根据从上身支承部接受的横向的平移力,能够在体感上识别起因于移动体与外界的障碍物接触等而在该移动体作用了第一反作用力这一情况。进而,操纵者能够恰当地采取中断移动等应对处理。
37.在上述第六发明中,能够采用如下方案(第七发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第一反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第一反作用力而得到的力中的至少横向的平移力维持为零、并且同时将线性组合上身支承部反作用力和所述第一反作用力而得到的力中的上下方向上的平移力维持为规定值。
38.据此,能够在未在移动体作用所述第一反作用力的状态下,起到与所述第四发明同样的效果。另外,在起因于移动体与外界的障碍物接触等而在该移动体作用了包含横向及上下方向上的平移力在内的所述第一反作用力的情况下,从上身支承部向操纵者的上身作用具有与该第一反作用力中的平移力的向量(三维向量)相应的大小及方向上的平移力的向量。由此,操纵者能够包含识别该第一反作用力的平移力的向量的方向在内地,在体感上识别起因于移动体与外界的障碍物接触等而在该移动体作用了第一反作用力这一情况。进而,操纵者能够更恰当地采取中断移动等应对处理。
39.在上述第六发明中,也能够采用如下方案(第八发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第一反作用力的观测值来控制所述上身支承
部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第一反作用力而得到的力中的横向的平移力维持为零、并且同时将所述上身支承部反作用力中的上下方向上的平移力维持为规定值。
40.据此,无论是否在移动体作用有第一反作用力,均将从上身支承部作用于操纵者的上身的上下方向上的平移力维持为规定值,因此操纵者能够无阻力感地进行伴随其步行动作产生的上身的上下移动。或者,操纵者能够在减轻了相对于重力产生的自身的腿的负荷的状态下移动。进而,能够顺利地进行用于移动体的移动操纵的移动。
41.另外,在所述第一发明中,也能够采用如下方案(第九发明):
42.所述移动体的操纵装置还具备:
43.上身支承部驱动机构,其安装于所述上身支承部,以能够对该上身支承部赋予使该上身支承部移动的力;
44.操纵用机械手,其安装于所述上身支承部驱动机构,能够供所述操纵者佩戴,以便通过双边控制来操纵设置于所述移动体的作业用机械手;以及
45.第一控制部,其根据所述上身支承部从所述操纵者的上身接受的反作用力即上身支承部反作用力的观测值及所述操纵者的上身相对于所述上身支承部产生的相对位移即操纵者上身相对位移的观测值中的任意观测值、以及第二反作用力的观测值来控制所述上身支承部驱动机构的动作,所述第二反作用力是所述操纵用机械手从所述操纵者接受的反作用力。
46.据此,能够反映操纵用机械手从操纵者接受的所述第二反作用力的状态而将所述上身支承部反作用力或所述操纵者上身相对位移控制为期望的状态。
47.在上述第九发明中,能够采用如下方案(第十发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第二反作用力而得到的力中的至少横向的平移力维持为零。
48.据此,能够在操纵用机械手上不作用所述第二反作用力的状态下,起到与所述第三发明同样的效果。另外,在操纵用机械手上作用所述第二反作用力的状态下,通过上身支承部驱动机构抵消该第二反作用力中的横向的平移力,能够避免该横向的平移力传向操纵者的腿(以后称作第一情况)。或者,能够将与该第二反作用力中的横向的平移力相应的大小的横向的平移力传向操纵者的腿(以后称作第二情况)。
49.而且,在上述第一情况下,即使通过移动体的作业用机械手进行在横向上具有大的平移力的作业,操纵者也能够不感觉该横向的平移力而移动操纵用机械手,因此能够容易地进行该作业。
50.另外,在上述第二情况下,当通过移动体的作业用机械手而进行在横向上具有平移力的作业时,操纵者能够在体感上识别该横向的平移力。因此,操纵者能够在该横向的平移力过大的情况等下,恰当地采取中止移动体的作业用机械手的操纵等应对处理。
51.在上述第十发明中,能够采用如下方案(第十一发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第二反作用力而得到的力中的至少横向的平移力维持为零、并且同时将线性组合所述上身支承部反作用力和所述
第二反作用力而得到的力中的上下方向上的平移力维持为规定值。
52.据此,能够在操纵用机械手上未作用所述第二反作用力的状态下,起到与所述第四发明同样的效果。另外,在操纵用机械手上作用所述第二反作用力的状态下,通过上身支承部驱动机构抵消该第二反作用力中的平移力的向量(三维向量),能够避免该平移力的向量传向操纵者的腿(以后称作第三情况)。或者,能够将与该第二反作用力中的平移力的向量的大小、方向相应的大小、方向的平移力的向量传向操纵者的腿(以后称作第四情况)。
53.而且,在上述第三情况下,即使通过移动体的作业用机械手进行在任意的方向上具有大的平移力的作业,操纵者也能够不感到该平移力而移动操纵用机械手,因此能够容易地进行该作业。
54.另外,在上述第四情况下,当通过移动体的作业用机械手进行具有任意的方向的平移力的向量的作业时,操纵者能够在体感上识别该平移力的向量的大小、方向。因此,操纵者能够在该平移力的向量的大小过大、或者该平移力的向量的方向成为异常的方向等情况下,恰当地采取中止移动体的作业用机械手的操纵等应对处理。
55.在上述第十发明中,也能够采用如下方案(第十二发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值和所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力和所述第二反作用力而得到的力中的横向的平移力维持为零、并且同时将所述上身支承部反作用力中的上下方向上的平移力维持为规定值。
56.据此,无论在操纵用机械手上是否作用有第二反作用力,都将从上身支承部作用于操纵者的上身的上下方向上的平移力维持为规定值,因此操纵者能够无阻力感地进行伴随其步行动作产生的上身的上下移动。或者,操纵者能够在减轻了相对于重力产生的自身的腿的负荷的状态下移动。进而,操纵者能够一边顺利地进行用于移动体的移动操纵的移动,一边操纵移动体的作业用机械手。
57.另外,在所述第一发明中,也能够采用如下方案(第十三发明):
58.所述移动体的操纵装置还具备:
59.上身支承部驱动机构,其安装于所述上身支承部,以能够对该上身支承部赋予使该上身支承部移动的力;
60.操纵用机械手,其安装于所述上身支承部驱动机构,能够供所述操纵者佩戴,以便通过双边控制来操纵设置于所述移动体的作业用机械手;以及
61.第一控制部,其根据所述上身支承部从所述操纵者的上身接受的反作用力即上身支承部反作用力的观测值及所述操纵者的上身相对于所述上身支承部产生的相对位移即操纵者上身相对位移的观测值中的任意观测值、第一反作用力的观测值、以及第二反作用力的观测值,来控制所述所述上身支承部驱动机构的动作,所述第一反作用力是所述移动体在其移动环境下除了从地板面接受的反作用力以外从外界接受的反作用力,所述第二反作用力是所述操纵用机械手从所述操纵者接受的反作用力。
62.据此,能够使作用于移动体的所述第一反作用力、以及操纵用机械手从操纵者接受的所述第二反作用力的状态得以反映,而将所述上身支承部反作用力或所述操纵者上身相对位移控制为期望的状态。
63.在上述第十三发明中,能够采用如下方案(第十四发明):所述第一控制部构成为
根据所述上身支承部反作用力的观测值、所述第一反作用力的观测值及所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力、所述第一反作用力及所述第二反作用力而得到的力中的至少横向的平移力维持为零。
64.据此,能够在未发生所述第一反作用力及第二反作用力的状态下,起到与所述第三发明同样的效果。另外,能够在未发生所述第一反作用力及第二反作用力中的第二反作用力的状态下,起到与所述第六发明同样的效果,能够在未发生第一反作用力的状态下,起到与所述第十发明同样的效果。另外,能够在发生所述第一反作用力及第二反作用力这双方的状态下,起到一并起到与所述第六发明及第十发明分别同样的效果。
65.在上述第十四发明中,能够采用如下方案(第十五发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值、所述第一反作用力的观测值及所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力、所述第一反作用力及所述第二反作用力而得到的力中的至少横向的平移力维持为零、并且同时将线性组合所述上身支承部反作用力、所述第一反作用力及所述第二反作用力而得到的力中的上下方向上的平移力维持为规定值。
66.据此,能够在未发生所述第一反作用力及第二反作用力的状态下,起到与所述第四发明同样的效果。另外,能够在未发生所述第一反作用力及第二反作用力中的第二反作用力的状态下,起到与所述第七发明同样的效果,能够在未发生第一反作用力的状态下,起到与所述第十一发明同样的效果。另外,能够在发生所述第一反作用力及第二反作用力这双方的状态下,一并起到与所述第七发明及第十一发明分别同样的效果。
67.在上述第十四发明中,也能够采用如下方案(第十六发明):所述第一控制部构成为根据所述上身支承部反作用力的观测值、所述第一反作用力的观测值及所述第二反作用力的观测值来控制所述上身支承部驱动机构的动作,以将线性组合所述上身支承部反作用力、所述第一反作用力及所述第二反作用力而得到的力中的横向的平移力维持为零、并且同时将所述上身支承部反作用力中的上下方向上的平移力维持为规定值。
68.据此,无论是否在移动体上作用有第一反作用力、或者是否在操纵用机械手上作用有第二反作用力,均将从上身支承部作用于操纵者的上身的上下方向上的平移力维持为规定值,因此操纵者能够无阻力感地进行伴随该步行动作产生的上身的上下移动。或者,操纵者能够在减轻了相对于重力产生的自身的腿的负荷的状态下移动。进而,在未进行移动体的作业用机械手的操纵的状态、或者进行着作业用机械手的操纵的状态中的任意状态的情况下,操纵者均能够顺利地进行用于移动体的移动操纵的移动。
69.优选的是,在所述第二发明、第三发明、第五发明、第六发明、第九发明、第十发明、第十三发明或第十四发明中,采用如下方案(第十七发明):
70.所述上身支承部驱动机构具备构成为能够在所述操纵者移动的地板面上移动的移动机构、以及能够产生该移动机构相对于该地板面的移动驱动力的第一致动器,
71.所述上身支承部搭载于所述移动机构,以能够与该移动机构一起移动,
72.所述第一控制部构成为通过所述第一致动器的控制来控制所述上身支承部驱动机构的动作。
73.据此,能够使上身支承部驱动机构伴随操纵者的移动而移动,因此即使操纵者的移动环境广阔,也能够使上身支承部驱动机构的结构小型化。另外,能够通过所述第一致动
器的控制来恰当地控制用于所述横向的平移力的控制的上身支承部驱动机构的动作。
74.优选的是,在所述第四发明、第七发明、第八发明、第十一发明、第十二发明、第十五发明或第十六发明中,能够采用如下方案(第十八发明):所述上身支承部驱动机构具备构成为能够在所述操纵者移动的地板面上移动的移动机构、能够产生该移动机构相对于该地板面的移动驱动力的第一致动器、将所述上身支承部支承为能够相对于所述移动机构升降的升降机构、以及能够产生使该上身支承部相对于所述移动机构升降的驱动力的第二致动器,
75.所述第一控制部构成为通过所述第一致动器及第二致动器的控制来控制所述上身支承部驱动机构的动作。
76.据此,与第十七发明同样,能够使上身支承部驱动机构伴随操纵者的移动而移动,因此即使操纵者的移动环境广阔,也能够使上身支承部驱动机构的结构小型化。另外,能够通过所述第一致动器及第二致动器的控制,来恰当地控制用于所述横向及上下方向上的平移力的控制的上身支承部驱动机构的动作。
77.在所述第二发明、第三发明、第五发明、第六发明、第九发明、第十发明、第十三发明、第十四发明或第十七发明中,也能够采用如下方案(第十九发明):所述上身支承部以成为在上下方向上移动自如的状态的方式安装于所述上身支承部驱动机构。
78.据此,通过将上身支承部佩戴于操纵者的上身,从而不需要在上下方向上驱动该上身支承部的致动器,就能够使上身支承部追随操纵者的上身的上下移动而上下移动。
79.另外,在所述第二发明、第三发明、第五发明、第六发明、第九发明、第十发明、第十三发明、第十四发明或第十七发明中,也能够采用如下方案(第二十发明):所述上身支承部以能够在上下方向上弹性移动的方式安装于所述上身支承部驱动机构。
80.需要说明的是,“能够在上下方向上弹性移动”是指能够根据上身支承部在上下方向上从基准的位置的位移而向该上身支承部作用使该上身支承部返回该基准的位置的方向上的作用力。
81.据此,能够减轻或者消除上身支承部的重量作用于操纵者的上身这一情况。
82.优选的是,在所述第二发明~第二十发明中,能够采用如下方案(第二十一发明):所述上身支承部以成为在所述操纵者的侧倾方向上、或在所述操纵者的俯仰方向上、或在该侧倾方向和该俯仰方向上旋转自如的状态的方式安装于所述上身支承部驱动机构。需要说明的是,上述侧倾方向是指绕操纵者的前后方向的轴的方向,上述俯仰方向是指绕操纵者的左右方向的轴的方向。
83.据此,操纵者能够无阻力感而顺利地进行在其步行时使上身在侧倾方向上倾斜、或者在俯仰方向上倾斜、或者在侧倾方向及俯仰方向上倾斜这样的动作。进而,操纵者能够顺利地进行基于步行的移动。
84.另外,本发明的操纵系统能够构成为具有所述第一发明~第二十一发明的操纵装置、以及所述移动体的系统。尤其是,优选的是,采用如下方案(第二十二发明):在操纵系统是具备所述第五发明~第八发明、第十三发明~第十六发明中的任意的发明的操纵装置、以及所述移动体的操纵系统的情况下,所述移动体具有构成为能够在其移动环境的地板面上移动的移动体用移动机构、以及经由所述第一反作用力的检测用的力检测器而搭载于该移动体用移动机构的上身部。
85.据此,能够由所述力检测器恰当地检测所述移动体的上身部从外界接受的反作用力(除了从地板面经由移动体用移动机构而接受的地板面反作用力之外的作用力)。
86.另外,优选的是,在上述第二十二发明中,能够采用如下方案(第二十三发明):所述上身部具备对所述移动体用移动机构的周围进行覆盖的罩。
87.据此,在移动体用移动机构的周围,罩从与其接触的障碍物等接受的反作用力也作为所述第一反作用力而能够由所述力检测器检测。
附图说明
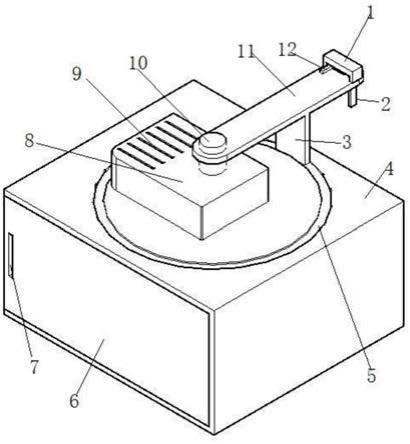
88.图1是表示本发明的第一实施方式中的作为移动体的从动装置的结构的立体图。
89.图2是表示从动装置中的动作控制所涉及的结构的框图。
90.图3是表示作为操纵从动装置的操纵装置的主动装置的结构的立体图。
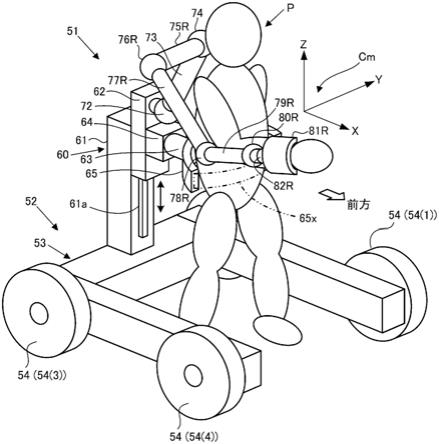
91.图4是表示主动装置和对其进行开动的操纵者的立体图。
92.图5是表示主动装置中的动作控制所涉及的结构的框图。
93.图6是表示图5所示的主操纵控制部的处理的流程图。
94.图7是表示图6的步骤3的子例程处理的流程图。
95.图8是表示图7的步骤4的子例程处理的流程图。
96.图9是表示图2所示的从动移动控制部的处理的流程图。
97.图10是表示图5所示的主动移动控制部的处理的流程图。
98.在图11中,图11的(a)是与从动移动控制部的处理相关的说明图,图11的(b)是与主动移动控制部的处理相关的说明图。
99.图12是表示图2所示的从动机械手控制部的处理的流程图。
100.图13是表示图5所示的主动机械手控制部的处理的流程图。
101.图14是表示本发明的第七实施方式中的主动装置的升降机构的图。
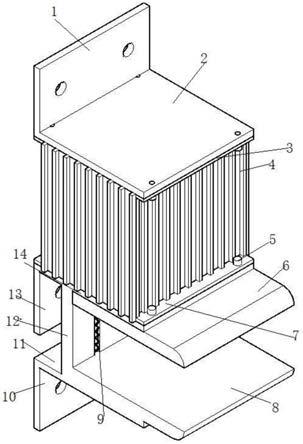
102.图15是表示本发明的第八实施方式中的上身支承部的结构的图。
103.图16是表示上身支承部驱动机构的另一例的立体图。
104.图17是表示上身支承部驱动机构的又一例的立体图。
具体实施方式
105.[第一实施方式]
[0106]
以下参照图1~图13来说明本发明的第一实施方式。在本实施方式中,作为本发明的一例,关于用于操纵图1所例示的移动体1的操纵装置51进行说明。在以后的说明中,将操纵对象的移动体1称作从动装置1,将用于操纵该从动装置1的操纵装置51称作主动装置51。
[0107]
[从动装置的结构]
[0108]
参照图1,从动装置1具备能够在其动作环境的地板面上移动的移动机构2、以及搭载于该移动机构2上的机械手10。需要说明的是,在本说明书中,“地板面”不限于通常的意思中的地板面,能够包括地面、路面等。另外,在以后的说明中,从动装置1的“前后方向”、“左右方向”、“上下方向”分别是图1所示的3轴直角坐标系cs的x轴方向、y轴方向、z轴方向。在该情况下,前后方向(x轴方向)及左右方向(y轴方向)相当于本发明中的“横向”。
[0109]
另外,为了区别从动装置1的左右的构成要素,对左侧的构成要素的参照附图标记
和右侧的构成要素的参照附图标记分别附加“l”、“r”。但是,在不需要进行左右的区别时,省略对参照附图标记的“l”、“r”的附加。
[0110]
移动机构2相当于本发明中的移动体用移动机构。该移动机构2具备基台3、以及安装于基台3的多个移动接地部4,在基台3与地板面之间具有间隔的状态下,多个移动接地部4接触于地板面上。需要说明的是,在图示例中,基台3的从上方观察时的形状为朝向前方呈两股状打开的形状(大致u字形状),但该基台3的形状可以是任意的形状。
[0111]
移动机构2作为多个移动接地部4而具备例如4个移动接地部4(1)、4(2)、4(3)、4(4)。而且,在基台3的前部的左右的两侧安装有两个移动接地部4(1)、4(4),在基台3的后部的左右的两侧安装有两个移动接地部4(2)、4(3))。
[0112]
各移动接地部4在图1中简略地记载为车轮状,详细而言,各移动接地部4构成为接触于地板面上的状态下能够在该地板面上全方向地移动。具体而言,各移动接地部4例如是与日本特开2013
‑
237329号公报或美国特许9027693号说明书中记载的主轮相同的构造。因此,省略本说明书中的各移动接地部4及其驱动机构的结构的详细的说明。
[0113]
在具备所涉及的移动接地部4的移动机构2上,针对各移动接地部4中的每个移动接地部而搭载有移动驱动机构5(在图2中示出),该移动驱动机构5具有作为其移动用的动力源的两个电动马达5a、5b(在图2中示出),关于该情况,省略详细的图示。而且,与各移动接地部4对应的移动驱动机构5如上述日本特开2013
‑
237329号公报或美国特许9027693号说明书所记载的那样,构成为通过从两个电动马达5a、5b向该移动接地部4进行动力传递从而使该移动接地部4能够全方向地移动。
[0114]
在该情况下,各移动接地部4被驱动为:各移动接地部4的移动速度向量中的从动装置1的前后方向(x轴方向)的速度分量成为与两个电动马达5a、5b各自的旋转速度之和成比例的速度,左右方向(y轴方向)的速度分量成为与两个电动马达5a、5b各自的旋转速度之差成比例的速度。
[0115]
需要说明的是,能够全方向移动的各移动接地部4的结构不限于上述日本特开2013
‑
237329号公报或美国特许9027693号说明书中记载的结构,也可以是全向轮(注册商标)等其他的构造。另外,移动机构2所具备的移动接地部4的个数不限于4个,例如也可以是3个、或者5个以上。另外,作为各移动接地部4的动力源不限于电动马达5a、5b,例如也能够使用液压马达。
[0116]
在基台3上经由升降机构30而安装有机械手10。该升降机构30具备从基台3的后部的中央部(左右方向上的中央部)朝向上方立起设置的支柱31、以及相对于该支柱31组装为能够在上下方向上移动(升降)的滑动构件32。
[0117]
在该情况下,支柱31经由力检测器33而安装于基台3。该力检测器33用于检测从动装置1的上身部(支承于基台3上的部分)从外界接受的反作用力(将从地板面经由移动机构2接受的地板面反作用力除外),以后称作上身力检测器33。该上身力检测器33相当于本发明中的移动体的力检测器,由该上身力检测器33检测的反作用力相当于本发明中的第一反作用力。而且,该上身力检测器33例如由六轴力传感器构成,并能够将平移力及力的力矩分别作为三维的向量来检测。需要说明的是,在以后的说明中,将“力的力矩”简称做力矩。另外,以后有时将从动装置1的上身部(支承于基台3上的部分)称作从动上身。
[0118]
作为引导滑动构件32相对于支柱31的移动的引导机构,例如在上下方向上延伸的
导轨31a安装于支柱31的前表面部。而且,滑动构件32卡合于导轨31a,以能够沿着该导轨31a升降。需要说明的是,引导机构也可以与上述不同。
[0119]
另外,升降机构30具备用于使滑动构件32相对于支柱31升降的致动器即滑动驱动致动器36(在图2中示出),关于该情况,省略详细的图示。该滑动驱动致动器36例如由电动马达构成。
[0120]
该滑动驱动致动器36安装于支柱31或滑动构件32,以便经由例如滚珠丝杠机构等旋转
·
直线运动变换机构(省略图示)而对滑动构件32赋予使滑动构件32相对于支柱31升降的驱动力,从而使该滑动构件32升降。需要说明的是,作为滑动驱动致动器36不限于电动马达,例如也能够使用液压马达、或者液压缸。
[0121]
所述机械手10相当本发明中的作业用机械手,在本实施方式中,所述机械手10安装于滑动构件32。该机械手10具备左右一对手部21l、21r,这两个手部21l、21r经由多个关节连结于滑动构件32。
[0122]
具体而言,机械手10例如具备从滑动构件32经由第一关节机构12延伸设置的第一连杆13、经由第二关节机构14安装于第一连杆13的前端部的左右一对第二连杆15l、15r、经由第三关节机构16l、16r分别安装于各第二连杆15l、15r的前端部的第三连杆17l、17r、经由第四关节机构18l、18r分别安装于各第三连杆17l、17r的前端部的第四连杆19l、19r、以及经由第五关节机构20l、20r分别安装于各第四连杆19l、19r的前端部的上述手部21l、21r。
[0123]
在该情况下,各手部21l、21r经由力检测器22l、22r而安装于各第五关节机构20l、20r,力检测器22l、22r用于检测各手部21l、21r从外界接受的反作用力(接触反作用力等外力)。各力检测器22(以后称作手部力检测器22)与所述上身力检测器33同样地例如由六轴力传感器构成。需要说明的是,各手部21能够包括把持物体的机构、装卸自如地吸附物体的机构、或者电动工具等。
[0124]
各关节机构12、14、16、18、20是公知的构造的关节机构,分别由一个或多个关节构成,以具有例如1轴以上的旋转自由度。需要说明的是,在本说明书中,如无特别说明,则“关节”是指具有1轴的旋转自由度的关节。
[0125]
在此,在上述结构的机械手10中,左右各自的从第三关节机构16到手部21的部分相当于左右各自的胳膊。而且,在以各胳膊的恰当的姿势进行基于左右的各手部21的各种各样的作业这方面上,优选左右的各手部21具有7个自由度以上的运动自由度。例如,相当于机械手10的左右的各胳膊的肩关节的第三关节机构16、相当于肘关节的第四关节机构18、相当于手腕关节的第五关节机构20能够构成为分别具有3轴的旋转自由度、1轴的旋转自由度、3轴的旋转自由度。
[0126]
另外,在机械手10搭载有多个关节致动器24(在图2中示出),该关节致动器24驱动分别构成各关节机构12、14、16、18、20的各关节,关于该情况,省略详细的图示。各关节致动器24例如由电动马达构成。
[0127]
需要说明的是,机械手10不限于旋转型的关节,也可以包括直线运动型的关节。另外,各手部21与滑动构件32之间的连结构造也可以与上述不同。各手部21例如也可以经由3轴的滑动机构连结于滑动构件32。另外,各关节致动器24不限于电动马达,例如也能够由液压马达、或者液压缸等液压致动器构成。
[0128]
在本实施方式的从动装置1中,还装配有罩26,该罩26用于避免外部的物体碰触移动机构2。该罩26例如在图1中由双点划线所示那样,在机械手10的下侧形成为覆盖移动机构2的整体的周围及上表面,并经由未图示的适当的安装构件而固定于支柱31。
[0129]
因此,在本实施方式的从动装置1中,防止在从动装置1的移动中存在于外界的物体等直接碰触移动机构2。而且,在罩26从外界接受到反作用力(接触反作用力等外力)时,该反作用力从罩26经由支柱31而向上身力检测器33传递。
[0130]
另外,机械手10安装于支柱31,因此机械手10从外界接受的反作用力(接触反作用力等外力)从该机械手10经由滑动构件32及支柱31而向上身力检测器33传递。
[0131]
因此,上身力检测器33搭载于从动装置1,以便能够检测除了从动上身从地板面经由移动机构2而接受的地板面反作用力之外从动上身从外界接受的反作用力。
[0132]
进行补充说明,在本实施方式中,与本发明中的移动体的上身部相当的从动上身由所述升降机构30、机械手10及罩26构成。
[0133]
参照图2,在从动装置1上还搭载有用于与主动装置51进行无线通信的通信装置40、以及具有进行从动装置1的动作控制等的功能的控制装置41。而且,在从动装置1上除了所述上身力检测器33及手部力检测器22之外还搭载有:作为用于检测各移动驱动机构5对各移动接地部4驱动的驱动状态的检测器的马达旋转检测器27、作为用于检测机械手10的动作状态的检测器的关节位移检测器28、以及用于检测滑动构件32的位移(上下方向位置)的滑动位移检测器29。
[0134]
马达旋转检测器27例如是能够将各移动驱动机构5中每个移动驱动机构的电动马达5a、5b各自的旋转轴(或与其连动而旋转的旋转构件)的旋转角检测为表示移动驱动机构5的驱动状态的状态量的检测器。另外,关节位移检测器28例如是能够将构成机械手10的各关节机构12、14、16、18、20的各关节的位移(旋转角)检测为表示机械手10的动作状态的状态量的检测器。这些马达旋转检测器27及关节位移检测器28分别例如能够由旋转编码器、分解器、电位计等构成。
[0135]
滑动位移检测器29例如由公知的接触式或者非接触式的位移传感器构成。另外,例如,在以滑动构件32的位移与滑动驱动致动器36的旋转轴的旋转角成比例的方式构成从滑动驱动致动器36向滑动构件32的动力传递机构的情况下,也能够使用能够检测该滑动驱动致动器36的旋转轴(或与该旋转轴连动而旋转的旋转构件)的旋转角的检测器作为滑动位移检测器。在该情况下,滑动位移检测器29可以是与所述马达旋转检测器27同样的检测器。
[0136]
需要说明的是,在从动装置1中,移动驱动机构5、马达旋转检测器27、关节致动器24、关节位移检测器28及手部力检测器22分别具备多个,但在图2中代表性地记载它们各自的仅一个。
[0137]
控制装置41由包括例如微型计算机、存储器、接口电路等在内的一个以上的电子电路单元构成。从主动装置51经由通信装置40向该控制装置41输入表示从动上身及各手部21的动作目标(目标运动)的指令数据,并且向该控制装置41输入在从动装置1上搭载的各检测器(上身力检测器33、各马达旋转检测器27、滑动位移检测器29、各关节位移检测器28及各手部力检测器22各自)的检测数据,详细的说明见后文叙述。
[0138]
而且,控制装置41作为通过所安装的硬件结构及程序(软件结构)的双方或一方实
现的功能而具有作为从动移动控制部42的功能、以及作为从动机械手控制部43的功能,其中,从动移动控制部42经由各移动驱动机构5的电动马达5a、5b和滑动驱动致动器36来控制从动装置1的上身的移动,从动机械手控制部43经由各关节致动器24来控制机械手10的各手部21的动作。另外,控制装置41能够经由通信装置40向主动装置51输出(发送)表示从动装置1的实际的动作状态(以后称作实际从动状态)的数据。
[0139]
在以后的说明中,有时在从动装置1的构成要素的名称的先头适当标注“从动”而记载。例如,有时将从动装置1的基台3记载为从动基台3。
[0140]
[主动装置的结构]
[0141]
接下来参照图3~图5来说明主动装置51的结构。需要说明的是,在以后的说明中,主动装置51的“前后方向”、“左右方向”、“上下方向”分别是图3或图4所示的3轴直角坐标系cm的x轴方向、y轴方向、z轴方向。在该情况下,前后方向(x轴方向)及左右方向(y轴方向)相当于本发明中的“横向”。
[0142]
另外,与从动装置1的情况同样,为了区别主动装置51的左右的构成要素,根据需要而适当对左侧的构成要素的参照附图标记和右侧的构成要素的参照附图标记分别附加“l”、“r”。
[0143]
参照图3及图4,主动装置51相当于本发明中的操纵装置。该主动装置51具备能够在操纵从动装置1的操纵者p(在图4中示出)的动作环境的地板面上移动的移动机构52、在操纵者p的上身佩戴的上身支承部65、以及用于操纵者p操纵从动机械手10的机械手70。
[0144]
移动机构52在本实施方式中是与从动移动机构2相同的结构,与该从动移动机构2同样地具备基台53、安装于该基台53的多个(4个)移动接地部54(54(1)、54(2)、54(3)、54(4))。而且,移动机构52与从动移动机构2同样地,作为与各移动接地部54对应的构成要素而具备:如图5所示具有电动马达55a、55b的移动驱动机构55;以及马达旋转检测器87,关于该情况,省略详细的图示。电动马达55a、55b相当于本发明中的第一致动器。
[0145]
在基台53上,经由升降机构60而安装有上身支承部65及机械手70。该升降机构60与所述移动机构52一起构成本发明中的上身支承部驱动机构。该升降机构60具备从基台53的后部的中央部(左右方向上的中央部)朝向上方立起设置的支柱61、以及相对于该支柱61组装为能够在上下方向上移动(升降)的滑动构件62。支柱61固定于基台53。
[0146]
作为引导滑动构件62相对于支柱61的移动的引导机构,例如在上下方向上延伸的导轨61a安装于支柱61的前表面部。而且,滑动构件62卡合于导轨61a,以能够沿着该导轨61a升降。需要说明的是,引导机构也可以与上述不同。
[0147]
另外,在主动装置51上搭载有滑动驱动致动器66(在图5中示出),滑动驱动致动器66是用于使滑动构件62相对于支柱61升降的致动器,关于该情况,省略详细的图示。该滑动驱动致动器66相当于本发明中的第二致动器,例如由电动马达构成。
[0148]
而且,滑动驱动致动器66例如借助与从动装置1的从滑动驱动致动器36向滑动构件32的动力传递机构同样的动力传递机构来使滑动构件62升降。需要说明的是,作为滑动驱动致动器66不限于电动马达,例如也能够使用液压马达、或者液压缸。
[0149]
上身支承部65在本实施方式中构成为能够从背面侧沿着操纵者p的上身的规定的部位、例如腰部的外周。例如,上身支承部65由弯曲形成为大致半圆弧形状(或者u字形状)的板状构件构成。而且,该上身支承部65经由支轴63及力检测器64而安装于滑动构件62。
[0150]
更详细而言,支轴63在使其轴心朝向前后方向(x轴方向)的状态下经由力检测器64而安装于滑动构件62。该力检测器64(以后称作上身力检测器64)是用于检测上身支承部65从操纵者p的上身接受的反作用力(接触反作用力)的检测器,与从动上身力检测器33同样地例如由六轴力传感器构成。
[0151]
而且,上身支承部65的两端间的中央部安装于支轴63。在该情况下,上身支承部65以能够相对于滑动构件62及上身力检测器64绕支轴63的轴心(换言之,在侧倾(roll)方向上)自由旋转的方式支承于支轴63。
[0152]
所涉及的上身支承部65配置为在操纵者p操纵从动装置1时如图4所示从其背面侧沿着操纵者p的上身的腰部的外周。而且,在上身支承部65的两端部连结以沿着操纵者p的腰部的前表面侧的外周的方式配设的挠性的带状物65x(在图4中由双点划线示出)。
[0153]
由此,由上身支承部65和带状物65x包围操纵者p的上身的腰部的周围,从而上身支承部65经由带状物65x佩戴于操纵者p的腰部。在该情况下,上身支承部65佩戴成不会相对于操纵者p的腰部进行相对位移。另外,上身支承部65通过适当地上下移动滑动构件62,从而能够调整上身支承部65的高度(上下方向上的位置)。另外,在上身支承部65的内周面安装有未图示的衬垫等弹性构件,该弹性构件抵接于操纵者p的腰部的周围。
[0154]
这样在将上身支承部65佩戴于操纵者p的腰部的状态下,成为伴随操纵者p的移动(步行)而上身支承部65及移动机构52能够与该操纵者p一起移动的状态。在该情况下,操纵者p能够将其上身在前后左右上倾斜。另外,由上身力检测器64检测上身支承部65从操纵者p的腰部接受的反作用力。
[0155]
机械手70相当于本发明中的操纵用机械手,在本实施方式中,机械手70安装于滑动构件62。该机械手70具备能够经由未图示的带状物而佩戴于操纵者p的左右的手腕(或者其附近部分)的左右一对两个手部81l、81r,这些手部81l、81r经由多个关节而连结于滑动构件62。
[0156]
在本实施方式中,手部81l、81r与滑动构件62之间的连结构造例如与从动机械手10相同。即,机械手70具备在上身力检测器64的上侧从滑动构件62经由第一关节机构72而延伸设置的第一连杆73、经由第二关节机构74而安装于第一连杆73的前端部的左右一对第二连杆75l、75r、经由第三关节机构76l、76r而分别安装于各第二连杆75l、75r的前端部的第三连杆77l、77r、以及经由第四关节机构78l、78r而分别安装于各第三连杆77l、77r的前端部的第四连杆79l、79r,在第四连杆79l、79r各自的前端部经由第五关节机构80l、80r及力检测器82l、82r而分别安装有上述手部81l、81r。
[0157]
在该情况下,各力检测器82用于检测各手部81从操纵者p的各胳膊的前端侧部分(手等)接受的反作用力(接触反作用力),与从动上身力检测器33等同样地例如由六轴力传感器构成。以后,将各力检测器82称作手部力检测器82。需要说明的是,由左右的手部力检测器82l、82r分别检测的反作用力的合力相当于本发明中的第二反作用力。
[0158]
另外,在上述结构的机械手70上与从动机械手10同样地搭载有多个关节致动器84(在图5中示出),该多个关节致动器84分别驱动构成各关节机构72、74、76、78、80的各关节(具有1轴的旋转自由度的关节),关于该情况,省略详细的图示。各关节致动器84例如由电动马达构成。
[0159]
需要说明的是,机械手70不限于旋转型的关节,也可以包括直线运动型的关节。另
外,各手部81与滑动构件62之间的连结构造也可以与从动机械手10不同。各手部21例如也可以经由3轴的滑动机构而与滑动构件62连结。另外,各关节致动器84不限于电动马达,例如也能够由液压马达、或者液压缸等液压致动器构成。
[0160]
参照图5,在主动装置51上还搭载有用于与从动装置1进行无线通信的通信装置90、以及具有进行主动装置51的动作控制等的功能的控制装置91。而且,在主动装置51上除了所述上身力检测器64及手部力检测器82之外还搭载有:作为用于检测由各移动驱动机构55对各移动接地部54驱动的驱动状态的检测器的马达旋转检测器87、作为用于检测机械手70的动作状态的检测器的关节位移检测器85、以及用于检测滑动构件62的位移(上下方向位置)的滑动位移检测器89。
[0161]
在该情况下,与从动装置1同样地马达旋转检测器87是能够检测各移动驱动机构55中每个移动驱动机构的电动马达55a、55b各自的旋转轴(或与其连动而旋转的旋转构件)的旋转角的检测器。另外,关节位移检测器85是能够检测构成机械手70的各关节机构72、74、76、78、80的各关节的位移(旋转角)的检测器。这些马达旋转检测器87及关节位移检测器85分别能够使用与从动马达旋转检测器27及从动关节位移检测器28分别相同的结构。另外,滑动位移检测器89也能够使用与从动滑动位移检测器29相同的结构。
[0162]
需要说明的是,在主动装置51中,移动驱动机构55、马达旋转检测器87、关节致动器84、关节位移检测器85及手部力检测器82分别具备多个,但在图5中代表性地记载它们各自的仅一个。
[0163]
控制装置91由包括例如微型计算机、存储器、接口电路等在内的一个以上的电子电路单元构成。从从动装置1经由通信装置90向该控制装置91输入表示实际从动状态的数据,并且向该控制装置91输入主动装置51的上身力检测器64、各手部力检测器82、各马达旋转检测器87及各关节位移检测器85各自的检测数据,详细的说明见后文叙述。
[0164]
而且,控制装置91作为通过所安装的硬件结构及程序(软件结构)的双方或一方实现的功能而具有作为主操纵控制部94的功能、作为主动移动控制部92的功能、以及作为主动机械手控制部93的功能,其中,该主操纵控制部94生成从动装置1及主动装置51的整体的动作目标(目标运动),该主动移动控制部92经由各移动驱动机构55的电动马达55a、55b和滑动驱动致动器66来控制上身支承部65的移动,该主动机械手控制部93经由各关节致动器84来控制机械手70的动作。另外,控制装置91能够经由通信装置90向从动装置1输出(发送)表示从动装置1的动作目标(目标运动)的指令数据。
[0165]
在以后的说明中,有时在主动装置51的构成要素的名称的先头适当地标注“主动”而记载。例如,有时将主动装置51的基台53记载为主动基台53。进行补充说明,主动装置51的主操纵控制部94具有作为本发明中的移动指令决定部的功能,并且与主动移动控制部92一起具有作为本发明中的第一控制部的功能。
[0166]
[控制处理及工作]
[0167]
接着,说明所述控制装置41、91的控制处理的详细情况、以及从动装置1及主动装置51的工作。在此,关于以后的说明中的用语进行补充说明,在任意的状态量(位置、速度、力等)的名称的先头附加了“实际”的情况、或者向该状态量的参照附图标记附加了“_act”这样的尾标的情况是指该状态量的实际的值或其观测值(检测值或推定值)。
[0168]
另外,在任意的状态量的名称的先头附加了“目标”的情况、或者在该状态量的参
照附图标记附加了“_aim”这样的尾标的情况是指该状态量的目标值。另外,在先头标注了
“↑”
的参照附图标记是表示向量(纵向量)的参照附图标记。
[0169]
而且,关于与从动装置1关联的状态量,有时在该状态量的名称的先头、或者在该状态量的名称与“实际”或“目标”之间附加“从动”。有关于此,与主动装置51关联的状态量也同样。
[0170]
另外,任意的物体的“运动”是指该物体的位置、速度(平移速度)、姿势角及角速度中的任一方的状态量或两个以上的状态量的组。姿势角是表示在某坐标系中观察时的该物体的朝向的角度(方位角)。该姿势角例如由欧拉角表示。需要说明的是,有时也将姿势角简称作姿势。
[0171]
[主操纵控制部的控制处理]
[0172]
首先,说明主控制装置91的主操纵控制部94的控制处理。主操纵控制部94以规定的控制处理周期逐次执行图6的流程图所示的处理。在步骤1中,主操纵控制部94经由通信装置40、90从从动控制装置41取得(接收)表示作为从动装置1的实际的动作状态的实际从动状态的数据。
[0173]
在上述实际从动状态中,如图5所示,包括从动上身(从动装置1的上身)除了地板面反作用力以外从外界接受的实际的反作用力即实际从动上身反作用力、从动上身的实际的运动即实际从动上身运动、各从动手部21的实际的运动即实际从动手部运动、各从动手部21从外界实际接受的反作用力即实际从动手部反作用力。
[0174]
上述实际从动上身反作用力更详细而言是经由所述支柱31、罩26或机械手10而从动上身从外界接受的实际的反作用力的合力。另外,实际从动上身反作用力及左右的实际从动手部反作用力分别由平移力与力矩的组而构成。而且,在步骤1中主操纵控制部94取得的实际从动上身反作用力的平移力及力矩分别表示为在相对于从动装置1的动作环境而任意地在设计上设定的全球坐标系(相对于该动作环境的地板面固定的三维坐标系。以后称作从动侧全球坐标系)中观察而得到的三维的向量。
[0175]
在该情况下,实际从动上身反作用力及左右的实际从动手部反作用力各自的力矩更详细而言是绕相对于从动装置1设定的规定的基准点(以后称作从动基准点qs)的力矩。该从动基准点qs能够考虑从动装置1的构造等而适当地在设计上设定。在本实施方式中,主动移动机构52与从动移动机构2具有大致同一或大致相似的形状。
[0176]
于是,例如能够以如下方式设定从动基准点qs,该方式是指从动基准点qs与从动移动机构2之间的位置关系、以及主动装置51中的后述的基准点qm与主动移动机构52之间的位置关系互相成为大致同一关系、或者相似的关系。图11的(a)所示的从动基准点qs例示出在这样的观点下设定的基准点。需要说明的是,在图11的(a)中,省略了机械手10的图示。
[0177]
进行补充说明,优选的是,在进行手部侧双边控制的运算时,事先将左右的实际从动手部反作用力的力矩变换为绕对各个从动手部21l、21r设定的规定的基准点(以后称作从动手部基准点qhs_l、qhs_r)的力矩,并事先将左右的实际主动手部反作用力的力矩变换为绕对各个主动手部81l、81r设定的规定的基准点(以后称作主动手部基准点qhm_l、qhm_r)的力矩。通过该变换,双边控制(bilateral control)的特性更为恰当。
[0178]
在以后的说明中,作为将实际从动上身反作用力的平移力及力矩分别示出的参照附图标记,分别使用
↑
f_sb_act、
↑
m_sb_act。另外,作为将左侧的实际从动手部反作用力的
平移力及力矩分别示出的参照附图标记,使用
↑
f_sh_act_l、
↑
m_sh_act_l,作为将右侧的实际从动手部反作用力的平移力及力矩分别示出的参照附图标记,使用
↑
f_sh_act_r、
↑
m_sh_act_r。
[0179]
而且,将左右的实际从动手部反作用力的合力称作实际从动手部合力,作为将该实际从动手部合力的平移力及力矩分别示出的参照附图标记,使用未附加“l”、“r”的参照附图标记
↑
f_sh_act、
↑
m_sh_act。在该情况下,
↑
f_sh_act=
↑
f_sh_act_l
↑
f_sh_act_r、
↑
m_sh_act=
↑
m_sh_act_l
↑
m_sh_act_r。
[0180]
另外,实际从动上身运动包括在上述从动侧全球坐标系中观察时的从动上身的位置
↑
p_sb_act、平移速度
↑
v_sb_act、姿势角
↑
θ_sb_act及角速度
↑
ω_sb_act。同样地,实际从动手部运动包括在上述从动侧全球坐标系中观察时的各从动手部21的位置
↑
p_sh_act、平移速度
↑
v_sh_act、姿势角
↑
θ_sh_act及角速度
↑
ω_sh_act。
[0181]
需要说明的是,从动上身的位置
↑
p_sb_act是相对于从动上身预先设定(定义)的代表点的位置,例如所述从动基准点qs的位置。另外,在本实施方式中,从动上身的姿势角
↑
θ_sb_act绕上下方向的轴的分量(偏转方向的分量)视作与从动基台3的姿势角绕上下方向的轴的分量(偏转方向的分量)一致。
[0182]
进行补充说明,从从动控制装置41对主操纵控制部94输出的实际从动状态的整体或一部分也可以是在相对于从动装置1设定的本地坐标系(例如后述的从动上身坐标系cs)中观察时的状态量。在该情况下,主操纵控制部94在步骤1中将从从动控制装置41给出的实际从动状态(在本地坐标系中观察时的实际从动状态)变换为在从动侧全球坐标系中观察时的实际从动状态而取得。
[0183]
另外,在本实施方式中,从动上身的运动中绕横向的轴的(俯仰(pitch)方向及侧倾方向的)姿势角及角速度不是控制对象。因此,在步骤1中,主操纵控制部94能够省略取得实际从动上身运动的姿势角
↑
θ_sb_act及角速度
↑
ω_sb_act中的绕横向的轴的姿势角及角速度,并且能够省略取得实际从动上身反作用力的力矩
↑
m_sb_act中的绕横向的轴的力矩。
[0184]
接下来,在步骤2中,主操纵控制部94从主动移动控制部92及主动机械手控制部93取得表示主动装置51的实际的动作状态即实际主动状态的数据。在该实际主动状态中,如图5所示,包括上身支承部65从操纵者p接受的实际的反作用力即实际上身支承部反作用力、上身支承部65的实际的运动即实际上身支承部运动、各主动手部81的实际的运动即实际主动手部运动、各主动手部81从操纵者p的胳膊的前端侧部分接受的实际的反作用力即实际主动手部反作用力。
[0185]
上述实际上身支承部反作用力及左右的实际主动手部反作用力分别由平移力和力矩的组而构成。而且,这些平移力及力矩分别表示为在相对于主动装置51的动作环境任意地在设计上设定的全球坐标系(相对于该动作环境的地板面固定的三维坐标系。以后称作主动侧全球坐标系)中观察时的三维的向量。
[0186]
在该情况下,实际上身支承部反作用力及左右的实际主动手部反作用力各自的力矩更详细而言是绕对主动装置51设定的规定的基准点(以后称作主动基准点qm)的力矩。该主动基准点qm例如能够如图11的(b)所示在所述支轴63的轴心上设定于上身支承部65的左右的两侧部之间的中间点(佩戴了上身支承部65的操纵者p的腰部的中心附近的点)。需要说明的是,在图11的(b)中,省略了主动机械手70的图示。
[0187]
以后,作为将实际上身支承部反作用力的平移力及力矩分别示出的参照附图标记,分别使用
↑
f_mb_act、
↑
m_mb_act。另外,作为将左侧的实际主动手部反作用力的平移力及力矩分别示出的参照附图标记,使用
↑
f_mh_act_l、
↑
m_mh_act_l,作为将右侧的实际主动手部反作用力的平移力及力矩分别示出的参照附图标记,使用
↑
f_mh_act_r、
↑
m_mh_act_r。
[0188]
而且,将左右的实际主动手部反作用力的合力称作实际主动手部合力,作为将实际主动手部合力的平移力及力矩分别示出的参照附图标记,使用未附加“l”、“r”的参照附图标记
↑
f_mh_act、
↑
m_mh_act。在该情况下,
↑
f_mh_act=
↑
f_mh_act_l
↑
f_mh_act_r、
↑
m_mh_act=
↑
m_mh_act_l
↑
m_mh_act_r。
[0189]
另外,实际上身支承部运动包括在上述主动侧全球坐标系中观察时的上身支承部65的位置
↑
p_mb_act、平移速度
↑
v_mb_act、姿势角
↑
θ_mb_act及角速度
↑
ω_mb_act。同样地,实际主动手部运动包括在上述主动侧全球坐标系中观察时的各主动手部81的位置
↑
p_mh_act、平移速度
↑
v_mh_act、姿势角
↑
θ_mh_act及角速度
↑
ω_mh_act。需要说明的是,上身支承部65的位置
↑
p_mb_act是相对于上身支承部65预先设定的代表点的位置、例如所述主动基准点qm的位置。另外,在本实施方式中,上身支承部65的姿势角
↑
θ_mb_act视作与主动基台53的姿势角一致。
[0190]
进行补充说明,从主动移动控制部92及主动机械手控制部93对主操纵控制部94输出的实际主动状态的整体或一部分也可以是在对主动装置50设定的本地坐标系(例如后述的主动上身坐标系cm)中观察时的状态量。在该情况下,主操纵控制部94在步骤2中将从主动移动控制部92或主动机械手控制部93给出的实际从动状态(在本地坐标系中观察时的实际从动状态)变换为在主动侧全球坐标系中观察时的实际主动状态而取得。
[0191]
另外,在本实施方式中,上身支承部65的运动中的绕横向的轴的(俯仰方向及侧倾方向的)姿势角及角速度不是控制对象。因此,在步骤2中,主操纵控制部94能够省略取得实际上身支承部运动的姿势角
↑
θ_mb_act及角速度
↑
ω_mb_act中的绕横向的轴的姿势角及角速度,并且能够省略取得实际上身支承部反作用力的力矩
↑
m_mb_act中的绕横向的轴的力矩。
[0192]
接下来,在步骤3中,主操纵控制部94执行与主动装置51的上身及从动装置1的上身的动作相关的双边控制即上身侧双边控制的处理。该上身侧双边控制的处理如图7的流程图所示执行。
[0193]
在步骤3
‑
1中,主操纵控制部94算出上身反作用力偏差。该上身反作用力偏差在本实施方式中由与平移力相关的上身反作用力偏差即上身反作用力平移力偏差
↑
efb、以及与力矩相关的上身反作用力偏差即上身反作用力力矩偏差
↑
emb构成。
[0194]
而且,上身反作用力平移力偏差
↑
efb例如定义为表示实际主动手部合力的平移力
↑
f_mh_act、实际从动上身反作用力的平移力
↑
f_sb_act及实际从动手部合力的平移力
↑
f_sh_act中的一个以上的平移力与实际上身支承部反作用力的平移力
↑
f_mb_act之间的相互的关系从规定的目标关系偏移的程度(偏离程度)的指标值。
[0195]
同样地上身反作用力力矩偏差
↑
emb例如定义为表示实际主动手部合力的力矩
↑
m_mh_act、实际从动上身反作用力的力矩
↑
m_sb_act及实际从动手部合力的力矩
↑
m_sh_act中的一个以上的力矩与实际上身支承部反作用力的力矩
↑
m_mb_act之间的相互的关系从规定的目标关系偏移的程度(偏离程度)的指标值。
[0196]
在此,在本实施方式中,通过后述的手部侧双边控制,控制左右各自的主动手部81及从动手部21的动作,以使左右各自的实际主动手部反作用力和实际从动手部反作用力分别关于平移力及力矩而互相以规定的比率呈比例关系。在该情况下,实际主动手部合力的平移力
↑
f_mh_act及实际从动手部合力的平移力
↑
f_sh_act中的一方成为另一方的因变量,实际主动手部合力的力矩
↑
m_mh_act及实际从动手部合力的力矩
↑
m_sh_act中的一方成为另一方的因变量。
[0197]
于是,在本实施方式中,将上身反作用力平移力偏差
↑
efb例如作为由实际主动手部合力的平移力
↑
f_mh_act及实际从动手部合力的平移力
↑
f_sh_act中的一方例如
↑
f_mh_act、实际从动上身反作用力的平移力
↑
f_sb_act、以及实际上身支承部反作用力的平移力
↑
f_mb_act所涉及的函数表示的指标值,由下式(1a)定义。
[0198]
同样地将上身反作用力力矩偏差
↑
emb例如作为由实际主动手部合力的力矩
↑
m_mh_act及实际从动手部合力的力矩
↑
m_sh_act中的一方例如
↑
m_mh_act、实际从动上身反作用力的力矩
↑
m_sb_act、以及实际上身支承部反作用力的力矩
↑
m_mb_act所涉及的函数表示的指标值,由下式(1b)定义。需要说明的是,在本说明书中,“*”是指乘号。
[0199]
↑
efb
[0200]
=
↑
f_mb_act ratio_fsb*
↑
f_sb_act
[0201]
ratio_fmh*
↑
f_mh_act
……
(1a)
[0202]
↑
emb
[0203]
=
↑
m_mb_act ratio_msb*
↑
m_sb_act
[0204]
ratio_mmh*
↑
m_mh_act
……
(1b)
[0205]
在此,式(1a)、(1b)的ratio_fsb、ratio_fmh、ratio_msb、ratio_mmh分别是表示
↑
f_sb_act、
↑
f_mh_act、
↑
m_sb_act、
↑
m_mh_act各自相对于操纵者p的回授比的系数,设定为分别预先定出的规定值。该系数也可以是标量及对角矩阵中的任一方。另外,在本实施方式中,式(1a)、(1b)各自右边的第二项的系数ratio_fsb、ratio_msb设定为互为相同的值,第三项的系数ratio_fmh、ratio_mmh设定为互为相同的值。但是,也可以将ratio_fsb、ratio_msb设定为互不相同的值、或者将ratio_fmh、ratio_mmh设定为互不相同的值。
[0206]
需要说明的是,也能够将式(1a)中的ratio_fsb、ratio_fmh一方或双方设定为零,并且将式(1a)中的ratio_msb、ratio_mmh的一方或双方设定为零,有关于此,见后述。因此,在本实施方式中,ratio_fsb≠0、ratio_fmh≠0、ratio_msb≠0、ratio_mmh≠0。
[0207]
在本实施方式中,由式(1a)定义的上身反作用力平移力偏差
↑
efb为零(
↑
f_mb_act=
‑
ratio_fsb*
↑
f_sb_act
‑
ratio_fmh*
↑
f_mh_act)是
↑
f_mb_act、
↑
f_sb_act及
↑
f_mh_act相互的目标关系。另外,由式(1b)定义的上身反作用力力矩偏差
↑
emb为零(
↑
m_mb_act=
‑
ratio_msb*
↑
m_sb_act
‑
ratio_mmh*
↑
m_mh_act)是
↑
m_mb_act、
↑
m_sb_act及
↑
m_mh_act相互的目标关系。
[0208]
而且,在步骤3
‑
1中,主操纵控制部94根据在所述步骤1取得的实际从动上身反作用力(
↑
f_sb_act、
↑
m_sb_act)、在所述步骤2取得的左右的实际主动手部反作用力的合力即实际主动手部合力(
↑
f_mh_act、
↑
m_mh_act)、以及在所述步骤2取得的实际上身支承部反作用力(
↑
f_mb_act、
↑
m_mb_act),按照上述式(1a)、(1b)来算出上身反作用力偏差(
↑
efb、
↑
emb)。
[0209]
需要说明的是,也能够代替实际主动手部合力(
↑
f_mh_act、
↑
m_mh_act)而使用与其成比例的实际从动手部合力(
↑
f_sh_act、
↑
m_sh_act)来算出上身反作用力偏差(
↑
efb、
↑
emb)。
[0210]
接下来,在步骤3
‑
2中,主操纵控制部94算出上身位置姿势偏差。该上身位置姿势偏差由与上身支承部65及从动上身各自的位置相关的上身位置偏差
↑
epb、以及与上身支承部65及从动上身各自的姿势角相关的上身姿势偏差
↑
ethb构成。
[0211]
而且,上身位置偏差
↑
epb定义为表示上身支承部65的位置
↑
p_mb_act与从动上身的位置
↑
p_sb_act之间的相互的关系从规定的目标关系的偏移程度(偏离程度)的指标值。同样地上身姿势偏差
↑
ethb定义为表示上身支承部65的姿势角
↑
θ_mb_act与从动上身的姿势角
↑
θ_sb_act之间的相互的关系从规定的目标关系的偏移程度(偏离程度)的指标值。
[0212]
更具体而言,在本实施方式中,从动上身的位置
↑
p_sb_act和姿势角
↑
θ_sb_act例如分别将上身支承部65的位置
↑
p_mb_act乘以(1/ratio_psb)倍的位置、以及上身支承部65的姿势角
↑
θmb_act乘以(1/ratio_thsb)倍的角度作为目标而被控制。
[0213]
于是,在本实施方式中,作为上身位置偏差
↑
epb及上身姿势偏差
↑
rthb分别使用由下式(2a)、(2b)的右边定义的指标值。
[0214]
↑
epb
[0215]
=
↑
p_mb_act
‑
ratio_psb*
↑
p_sb_act
……
(2a)
[0216]
↑
ethb
[0217]
=
↑
θ_mb_act
‑
ratio_thsb*
↑
θ_sb_act
……
(2b)
[0218]
在此,式(2a)、(2b)的系数ratio_psb、ratio_thsb分别是预先设定的规定值的系数(标量或对角矩阵)。另外,在本实施方式中,ratio_psb、ratio_thsb设定为互为相同的值。但是,也可以将ratio_psb、ratio_thsb设定为互不相同的值。需要说明的是,在本说明书中,在任意的变量a为对角矩阵的情况下,1/a是指a的逆矩阵。例如,在上述系数ratio_psb为对角矩阵的情况下,(1/ratio_psb)是ratio_psb的逆矩阵。
[0219]
在本实施方式中,由式(2a)定义的上身位置偏差
↑
epb为零(
↑
p_mb_act=ratio_psb*
↑
p_sb_act)是
↑
p_mb_act、
↑
p_sb_act相互的目标关系,由式(2b)定义的上身姿势偏差
↑
ethb为零(
↑
θ_mb_act=ratio_thsb*
↑
θ_sb_act)是
↑
θ_mb_act、
↑
θ_sb_act相互的目标关系。
[0220]
而且,在步骤3
‑
2中,主操纵控制部94根据在所述步骤1取得的实际从动上身运动中的位置
↑
p_sb_act及姿势角
↑
θ_sb_act、以及在所述步骤2取得的实际上身支承部运动中的位置
↑
p_mb_act及姿势角
↑
θ_mb_act,按照上述式(2a)、(2b)来算出上身位置姿势偏差(
↑
epb、
↑
ethb)。
[0221]
接下来,在步骤3
‑
3中,主操纵控制部94决定上身支承部65的平移加速度及角加速度各自的目标值即目标上身支承部平移加速度
↑
acc_mb_aim及目标上身支承部角加速度
↑
β_mb_aim、以及从动上身的平移加速度及角加速度各自的目标值即目标从动上身平移加速度
↑
acc_sb_aim及目标从动上身角加速度
↑
β_sb_aim,以使上身反作用力偏差及上身位置姿势偏差收敛为零。
[0222]
在该情况下,更详细而言,目标上身支承部平移加速度
↑
acc_mb_aim及目标从动上身平移加速度
↑
acc_sb_aim被决定为使上身反作用力平移力偏差
↑
efb及上身位置偏差
↑
epb分别收敛为零,目标上身支承部角加速度
↑
β_mb_aim及目标从动上身角加速度
↑
β_sb_aim被
决定为使上身反作用力力矩偏差
↑
emb及上身姿势偏差
↑
ethb分别收敛为零。
[0223]
而且,决定目标上身支承部平移加速度
↑
acc_mb_aim及目标从动上身平移加速度
↑
acc_sb_aim的方法与决定目标上身支承部角加速度
↑
β_mb_aim及目标从动上身角加速度
↑
β_sb_aim的方法互为同样的方法。以下,详细说明决定
↑
acc_mb_aim及
↑
acc_sb_aim的方法。
[0224]
当将表示上身支承部65与操纵者p之间的刚性的系数记作kmb,并将表示从动上身与外界物(除了地板面之外)之间的刚性的系数记作ksb时,能够视作在实际上身支承部反作用力的平移力
↑
f_mb_act
↑
与实际上身支承部运动中的位置
↑
p_mb_act之间近似地下式(3a)的关系成立。同样地能够视作在实际从动上身反作用力的平移力
↑
f_sb_act
↑
与实际从动上身运动中的位置
↑
p_sb_act之间近似地下式(4a)的关系成立。
[0225]
↑
f_mb_act
[0226]
=
‑
kfmb*
↑
p_mb_act
↑
cfmb
……
(3a)
[0227]
↑
f_sb_act
[0228]
=
‑
kfsb*
↑
p_sb_act
↑
cfsb
……
(4a)
[0229]
需要说明的是,系数kfmb、kfsb分别是与所谓的弹簧常数相当的规定值的系数(标量或对角矩阵)。另外,
↑
cfmb、
↑
cfsb分别是常数向量(各分量为某值的常数的向量)。
[0230]
根据所述式(1a)、(3a)、(4a)得到下式(5a)。
[0231]
↑
efb
[0232]
=(
‑
kfmb*
↑
p_mb_act
↑
cfmb)
[0233]
ratio_fsb*(
‑
kfsb*
↑
p_sb_act
↑
cfsb)
[0234]
ratio_fmh*
↑
f_mh_act
[0235]
=
‑
kfmb*
↑
p_mb_act
‑
ratio_fsb*kfsb*
↑
p_sb_act
[0236]
ratio_fmh*
↑
f_mh_act
[0237]
↑
cfmb ratio_fsb*
↑
cfsb
……
(5a)
[0238]
在此,变量
↑
ua、
↑
va分别由下式(6a)、(7a)定义。
[0239]
↑
ua
[0240]
=
‑
kfmb*
↑
p_mb_act
‑
ratio_fsb*kfsb*
↑
p_sb_act
[0241]
……
(6a)
[0242]
↑
va
[0243]
=
↑
p_mb_act
‑
ratio_psb*
↑
p_sb_act
……
(7a)
[0244]
此时,根据所述式(2a)、(5a)、(6a)、(7a)得到下式(8a)、(9a)。
[0245]
↑
efb
[0246]
=
↑
ua ratio_fmh*
↑
f_mh_act
[0247]
↑
cfmb ratio_fsb*
↑
cfsb
……
(8a)
[0248]
↑
epb=
↑
va
……
(9a)
[0249]
另外,为了使上身反作用力平移力偏差
↑
efb收敛为零,该上身反作用力平移力偏差
↑
efb的二阶微分值与满足下式(10a)的关系式的目标值
↑
efb_dotdot_aim一致即可。同样地为了使上身位置偏差
↑
epb收敛为零,该上身位置偏差
↑
epb的二阶微分值与满足下式(11a)的关系式的目标值
↑
epb_dotdot_aim一致即可。
[0250]
↑
efb_dotdot_aim
[0251]
=
‑
kfbp*
↑
efb
‑
kfbv*
↑
efb_dot
[0252]
……
(10a)
[0253]
↑
epb_dotdot_aim
[0254]
=
‑
kpbp*
↑
epb
‑
kpbv*
↑
epb_dot
[0255]
……
(11a)
[0256]
需要说明的是,式(10a)的右边的系数kfbp、kfbv是规定值的增益(标量或对角矩阵),
↑
efb_dot是
↑
efb的一阶微分值(时间上的变化率)。另外,式(11a)的右边的系数kpbp、kpbv是规定值的增益(标量或对角矩阵),
↑
epb_dot是
↑
epb的一阶微分值(时间上的变化率)。
[0257]
进行补充说明,在本说明书中,附加了“_dot”的参照附图标记表示由去除了“_dot”的参照附图标记示出的状态量的一阶微分值(时间上的变化率),附加了“_dotdot”的参照附图标记表示由去除了“_dotdot”的参照附图标记示出的状态量的二阶微分值。
[0258]
另一方面,通过将所述式(8a)、(9a)各自的两边二次微分,从而得到下式(12a)、(13a)。
[0259]
↑
efb_dotdot
[0260]
=
↑
ua_dotdot ratio_fmh*
↑
f_mh_dotdot_act
[0261]
……
(12a)
[0262]
↑
epb_dotdot=
↑
va_dotdot
……
(13a)
[0263]
因此,当将用于使上身反作用力平移力偏差
↑
efb收敛为零的
↑
ua_dotdot的目标值记为
↑
ua_dotdot_aim,并将用于使上身位置偏差
↑
epb收敛为零的
↑
va_dotdot的目标值记为
↑
va_dotdot_aim时,从式(12a)、(13a)得到下式(14a)、(15a)。
[0264]
↑
efb_dotdot_aim
[0265]
=
↑
ua_dotdot_aim ratio_fmh*
↑
f_mh_dotdot_act
[0266]
……
(14a)
[0267]
↑
epb_dotdot_aim=
↑
va_dotdot_aim
[0268]
……
(15a)
[0269]
而且,从所述式(10a)、(11a)、(14a)、(15a)得到下式(16a)、(17a)。
[0270]
↑
ua_dotdot_aim
[0271]
=
‑
kfbp*
↑
efb
‑
kfbv*
↑
efb_dot
[0272]
‑
ratio_fmh*
↑
f_mh_dotdot_act
[0273]
……
(16a)
[0274]
↑
va_dotdot_aim
[0275]
=
‑
kpbp*
↑
epb
‑
kpbv*
↑
epb_dot
[0276]
……
(17a)
[0277]
另外,根据通过将式(6a)、(7a)各自的两边二次微分而得到的关系式,能得到与目标上身支承部平移加速度
↑
acc_mb_aim及目标从动上身平移加速度
↑
acc_sb_aim相关的下式(18a)、(19a)。
[0278]
↑
ua_dotdot_aim
[0279]
=
‑
kfmb*
↑
acc_mb_aim
[0280]
‑
ratio_fsb*kfsb*
↑
acc_sb_aim
[0281]
……
(18a)
[0282]
↑
va_dotdot_aim
[0283]
=
↑
acc_mb_aim
‑
ratio_psb*
↑
acc_sb_aim
[0284]
……
(19a)
[0285]
通过将式(18a)、(19a)作为联立方程式,求
↑
acc_mb_aim及
↑
acc_sb_aim,从而得到下式(20a)、(21a)。
[0286]
↑
acc_mb_aim
[0287]
=
‑
(ratio_psb/(kfmb*ratio_psb ratio_fsb*kfsb))
[0288]
*
↑
ua_dotdot_aim
[0289]
(ratio_fsb*kfsb/(kfmb*ratio_psb
[0290]
ratio_fsb*kfsb))*
↑
va_dotdot_aim
[0291]
……
(20a)
[0292]
↑
acc_sb_aim
[0293]
=
‑
(1/(kfmb*ratio_psb ratio_fsb*kfsb))
[0294]
*
↑
ua_dotdot_aim
[0295]
‑
(kfmb/(kfmb*ratio_psb
[0296]
ratio_fsb*kfsb))*
↑
va_dotdot_aim
[0297]
……
(21a)
[0298]
上述式(16a)、(17a)、(20a)、(21a)是用于决定目标上身支承部平移加速度
↑
acc_mb_aim及目标从动上身平移加速度
↑
acc_sb_aim的式子。在该情况下,根据在步骤3
‑
1求出的上身反作用力平移力偏差
↑
efb、作为其一阶微分值(时间上的变化率)而求出的
↑
efb_dot、作为在所述步骤2取得的左右的实际主动手部反作用力的合力即实际主动手部合力的平移力
↑
f_mh_act的二阶微分值而求出的
↑
f_mh_dotdot_act,并按照式(16a)来算出
↑
ua_dotdot_aim。另外,根据在步骤3
‑
2求出的上身位置偏差
↑
epb、以及作为其一阶微分值(时间上的变化率)而求出的
↑
epb_dot,并按照式(17a)来算出
↑
va_dotdot_aim。
[0299]
而且,根据这些
↑
ua_dotdot_aim、
↑
va_dotdot_aim的算出值,并按照式(20a)、(21a)来算出目标上身支承部平移加速度
↑
acc_mb_aim及目标从动上身平移加速度
↑
acc_sb_aim。由此,决定
↑
acc_mb_aim、
↑
acc_sb_aim,以使上身反作用力平移力偏差
↑
efb及上身位置偏差
↑
epb收敛为零。
[0300]
进行补充说明,根据式(1a)、(2a)、对式(1a)、(2a)各自的两边微分而得到的关系式、以及式(16a)、(17a),能得到下式(22a)、(23a)。
[0301]
↑
ua_dotdot_aim
[0302]
=
‑
kfbp*
↑
efb
‑
kfbv*
↑
efb_dot
[0303]
‑
ratio_fmh*
↑
f_mh_dotdot_act
[0304]
=
‑
kfbp*(
↑
f_mb_act ratio_fsb*
↑
f_sb_act
[0305]
ratio_fmh*
↑
f_mh_act)
[0306]
‑
kfbv*(
↑
f_mb_dot_act ratio_fsb*
↑
f_sb_dot_act
[0307]
ratio_fmh*
↑
f_mh_dot_act)
[0308]
‑
ratio_fmh*
↑
f_mh_dotdot_act
[0309]
……
(22a)
[0310]
↑
va_dotdot_aim
[0311]
=
‑
kpbp*
↑
epb
‑
kpbv*
↑
epb_dot
[0312]
=
‑
kpbp*(
↑
p_mb_act
‑
ratio_psb*
↑
p_sb_act)
[0313]
‑
kpbv*(
↑
p_mb_dot_act
‑
ratio_psb*
↑
p_sb_dot_act)
[0314]
=
‑
kpbp*(
↑
p_mb_act
‑
ratio_psb*
↑
p_sb_act)
[0315]
‑
kpbv*(
↑
v_mb_act
‑
ratio_psb*
↑
v_sb_act)
[0316]
……
(23a)
[0317]
因此,也能够根据在所述步骤2取得的实际上身支承部反作用力的平移力
↑
f_mb_act、在所述步骤2取得的左右的实际主动手部反作用力的合力即实际主动手部合力的平移力
↑
f_mh_act、在所述步骤1取得的实际从动上身反作用力的平移力
↑
f_sb_act的各自、作为它们的一阶微分值(时间上的变化率)而求出的
↑
f_mb_dot_act、
↑
f_mh_dot_act、
↑
f_sb_dot_act、以及作为
↑
f_mh_act的二阶微分值而求出的
↑
f_mh_dotdot_act,并按照式(22a)来算出
↑
ua_dotdot_aim。
[0318]
另外,也能够根据在所述步骤2取得的实际上身支承部运动中的位置
↑
p_mb_act及平移速度
↑
v_mb_act、以及在所述步骤1取得的实际从动上身运动中的位置
↑
p_sb_act及平移速度
↑
v_sb_act,并按照式(23a)来算出
↑
va_dotdot_aim。在这样的情况下,在步骤3
‑
1及3
‑
2的各个步骤中不需要算出上身反作用力平移力偏差
↑
efb和上身位置偏差
↑
epb的处理。
[0319]
而且,也能够通过综合式(16a)、(17a)的组或式(22a)、(23a)的组、以及式(20a)、(21a)的组而得到的关系式(不包含
↑
ua_dotdot_aim、
↑
va_dotdot_aim的关系式),来算出
↑
acc_mb_aim、
↑
acc_sb_aim。
[0320]
与上述同样地也能够得到用于决定目标上身支承部角加速度
↑
β_mb_aim及目标从动上身角加速度
↑
β_sb_aim的关系式。在该情况下,作为与所述式(3a)、(4a)、(6a)、(7a)、(10a)、(11a)分别对应的关系式,分别定义下式(3b)、(4b)、(6b)、(7b)、(10b)、(11b)。
[0321]
↑
m_mb_act
[0322]
=
‑
kmmb*
↑
θ_mb_act
↑
cmmb
[0323]
……
(3b)
[0324]
↑
m_sb_act
[0325]
=
‑
kmsb*
↑
θ_sb_act
↑
cmsb
[0326]
……
(4b)
[0327]
↑
ub
[0328]
=
‑
kmmb*
↑
θ_mb_act
‑
ratio_msb*kmsb*
↑
θ_sb_act
[0329]
……
(6b)
[0330]
↑
vb
[0331]
=
↑
θ_mb_act
‑
ratio_thsb*
↑
θ_sb_act
[0332]
……
(7b)
[0333]
↑
emb_dotdot_aim
[0334]
=
‑
kmbp*
↑
emb
‑
kmbv*
↑
emb_dot
[0335]
……
(10b)
[0336]
↑
ethb_dotdot_aim
[0337]
=
‑
kthbp*
↑
ethb
‑
kthbv*
↑
ethb_dot
[0338]
……
(11b)
[0339]
需要说明的是,式(3b)、(6b)的kmmb及式(4b)、(6b)的系数kmsb分别与式(3a)的系数kfmb、式(4a)的系数kfsb同样地是表示刚性的规定值的系数(标量或对角矩阵),式(3b)的
↑
cmmb及式(4b)的
↑
cmsb分别是常数向量。另外,式(10b)的系数kmbp、kmbv及式(11b)的系数kthbp、kthbv分别是规定值的增益(标量或对角矩阵)。
[0340]
而且,根据这些式(3b)、(4b)、(6b)、(7b)、(10b)、(11b)和所述式(1b)、(2b),能得到与所述式(16a)、(17a)、(20a)、(21a)分别对应的下式(16b)、(17b)、(20b)、(21b)。
[0341]
↑
ub_dotdot_aim
[0342]
=
‑
kmbp*
↑
emb
‑
kmbv*
↑
emb_dot
[0343]
‑
ratio_mmh*
↑
m_mh_dotdot_act
[0344]
……
(16b)
[0345]
↑
vb_dotdot_aim
[0346]
=
‑
kthbp*
↑
ethb
‑
kthbv*
↑
ethb_dot
[0347]
……
(17b)
[0348]
↑
β_mb_aim
[0349]
=
‑
(ratio_thsb/(kmmb*ratio_thsb ratio_msb*kmsb))
[0350]
*
↑
ub_dotdot_aim
[0351]
(ratio_msb*kmsb/(kmmb*ratio_thsb
[0352]
ratio_msb*kmsb))*
↑
vb_dotdot_aim
[0353]
……
(20b)
[0354]
↑
β_sb_aim
[0355]
=
‑
(1/(kmmb*ratio_thsb ratio_msb*kmsb))
[0356]
*
↑
ub_dotdot_aim
[0357]
‑
(kmmb/(kmmb*ratio_thsb ratio_msb*kmsb))
[0358]
*
↑
vb_dotdot_aim
[0359]
……
(21b)
[0360]
上述式(16b)、(17b)、(20b)、(21b)是用于决定目标上身支承部角加速度
↑
β_mb_aim及目标从动上身角加速度
↑
β_sb_aim的式子。在该情况下,根据在步骤3
‑
1求出的上身反作用力力矩偏差
↑
emb、作为其一阶微分值(时间上的变化率)而求出的
↑
emb_dot、以及作为在所述步骤2取得的左右的实际主动手部反作用力的合力即实际主动手部合力的力矩
↑
m_mh_act的二阶微分值而求出的
↑
m_mh_dotdot_act,并按照式(16b)来算出
↑
ub_dotdot_aim。另外,根据在步骤3
‑
2求出的上身姿势偏差
↑
ethb、以及作为其一阶微分值(时间上的变化率)而求出的
↑
ethb_dot,并按照式(17b)来算出
↑
vb_dotdot_aim。
[0361]
而且,根据这些
↑
ub_dotdot_aim、
↑
vb_dotdot_aim的算出值并按照式(20b)、(21b)来算出目标上身支承部角加速度
↑
β_mb_aim及目标从动上身角加速度
↑
β_sb_aim。由此,决定
↑
β_mb_aim、
↑
β_sb_aim,以使上身反作用力力矩偏差
↑
emb和上身姿势偏差
↑
ethb收敛为
零。
[0362]
进行补充说明,根据式(1b)、(2b)、对式(1b)、(2b)各自的两边微分而得到的关系式、以及式(16b)、(17b),能得到下式(22b)、(23b)。
[0363]
↑
ub_dotdot_aim
[0364]
=
‑
kmbp*(
↑
m_mb_act ratio_msb*
↑
m_sb_act
[0365]
ratio_mmh*
↑
m_mh_act)
[0366]
‑
kmbv*(
↑
m_mb_dot_act ratio_msb*
↑
m_sb_dot_act
[0367]
ratio_mmh*
↑
m_mh_dot_act)
[0368]
‑
ratio_mmh*
↑
m_mh_dotdot_act
[0369]
……
(22b)
[0370]
↑
vb_dotdot_aim
[0371]
=
‑
kthbp*(
↑
θ_mb_act
‑
ratio_thsb*
↑
θ_sb_act)
[0372]
‑
kthbv*(
↑
ω_mb_act
‑
ratio_thsb*
↑
ω_sb_act)
[0373]
……
(23b)
[0374]
因此,也能够根据在所述步骤2取得的实际上身支承部反作用力的力矩
↑
m_mb_act、在所述步骤2取得的左右的实际主动手部反作用力的合力即实际主动手部合力的力矩
↑
m_mh_act、在所述步骤1取得的实际从动上身反作用力的力矩
↑
m_sb_act的各自、作为它们的一阶微分值(时间上的变化率)而求出的
↑
m_mb_dot_act、
↑
m_mh_dot_act、
↑
m_sb_dot_act、以及作为
↑
m_mh_act的二阶微分值而求出的
↑
m_mh_dotdot_act,并按照式(22b)来算出
↑
ub_dotdot_aim。
[0375]
另外,也能够根据在所述步骤2取得的实际上身支承部运动中的姿势角
↑
θ_mb_act及角速度
↑
ω_mb_act、以及在所述步骤1取得的实际从动上身运动中的姿势角
↑
θ_sb_act及角速度
↑
ω_sb_act,并按照式(23b)来算出
↑
vb_dotdot_aim。在这样的情况下,在步骤3
‑
1及3
‑
2的各个步骤中不需要算出上身反作用力力矩偏差
↑
emb和上身姿势偏差
↑
ethb的处理。
[0376]
而且,也能够通过综合式(16b)、(17b)的组或式(22b)、(23b)的组、以及式(20b)、(21b)的组而得到的关系式(不包含
↑
ub_dotdot_aim、
↑
vb_dotdot_aim的关系式),来算出
↑
β_mb_aim、
↑
β_sb_aim。
[0377]
需要说明的是,在本实施方式中,上身支承部及从动上身各自的运动中的绕与上下方向正交的方向(横向)的轴的姿势角及角速度不是控制对象。因此,也可以省略
↑
β_mb_aim、
↑
β_sb_aim中的绕横向的轴的角加速度的算出。
[0378]
在本实施方式中,步骤3
‑
3的处理如上述执行。
[0379]
接下来,在步骤3
‑
4中,主操纵控制部94通过对如上述那样决定的目标上身支承部平移加速度
↑
acc_mb_aim、目标上身支承部角加速度
↑
β_mb_aim、目标从动上身平移加速度
↑
acc_sb_aim及目标从动上身角加速度
↑
β_sb_aim分别积分,来决定上身支承部65的目标平移速度即目标上身支承部平移速度
↑
v_mb_aim、上身支承部65的目标角速度即目标上身支承部角速度
↑
ω_mb_aim、从动装置1的上身目标平移速度即目标从动上身平移速度
↑
v_sb_aim、以及从动装置1的上身的目标角速度即目标从动上身角速度
↑
ω_sb_aim。
[0380]
步骤3的上身侧双边控制的处理如以上那样执行。由此,决定作为上身支承部65的目标运动(以后称作目标上身支承部运动)的构成要素的目标上身支承部平移速度
↑
v_mb_
aim及目标上身支承部角速度
↑
ω_mb_aim、以及作为从动上身的目标运动(以后称作目标从动上身运动)的构成要素的目标从动上身平移速度
↑
v_sb_aim及目标从动上身角速度
↑
ω_sb_aim。
[0381]
返回图6,接着,在步骤4中,主操纵控制部94执行与主动机械手70的手部81l、81r及从动机械手10的手部21l、21r的动作相关的双边控制即手部侧双边控制的处理。
[0382]
该手部侧双边控制的处理对左侧的主动手部81l及左侧的从动手部21l的组、以及右侧的主动手部81r及右侧的从动手部21r的组中的各个组中的每个,如图8的流程图所示那样执行。在以后的说明中,例如将与左侧的主动手部81l及从动手部21l的组相关的处理代表性地说明。
[0383]
在步骤4
‑
1中,主操纵控制部94算出手部反作用力偏差。在此,手部反作用力偏差与所述上身反作用力偏差同样地由与平移力相关的手部反作用力偏差即手部反作用力平移力偏差
↑
efh、以及与力矩相关的手部反作用力偏差即手部反作用力力矩偏差
↑
emh构成。
[0384]
而且,手部反作用力平移力偏差
↑
efh定义为表示左侧的实际主动手部反作用力的平移力
↑
f_mh_act_l与左侧的实际从动手部反作用力的平移力
↑
f_sh_act_l之间的相互的关系从规定的目标关系的偏移的程度(偏离程度)的指标值。
[0385]
同样地手部反作用力力矩偏差
↑
emh定义为表示左侧的实际主动手部反作用力的力矩
↑
m_mh_act_l与左侧的实际从动手部反作用力的力矩
↑
m_sh_act_l之间的相互的关系从规定的目标关系的偏移的程度(偏离程度)的指标值。
[0386]
需要说明的是,优选的是,如前述那样,在求取手部反作用力力矩偏差
↑
emh时,左侧的实际主动手部反作用力的力矩
↑
m_mh_act_l事先变换为绕对左侧的主动手部81l设定的规定的基准点qhm_l的力矩,左侧的实际从动手部反作用力的力矩
↑
m_sh_act_l事先变换为绕对左侧的从动手部21l设定的规定的基准点qhs_l的力矩。通过该变换,双边控制的特性更为恰当。
[0387]
在此,在本实施方式中,控制该主动手部81l及从动手部21l的动作,以使左侧的实际主动手部反作用力的平移力
↑
f_mh_act_l及力矩
↑
m_mh_act_l各自与左侧的实际从动手部反作用力的平移力
↑
f_sh_act_l及力矩
↑
m_sh_act_l各自以规定的比率呈比例。
[0388]
于是,在本实施方式中,使手部反作用力平移力偏差
↑
efh例如为由下式(31a)定义的指标值,并使手部反作用力力矩偏差
↑
efh例如为由下式(31b)定义的指标值。
[0389]
↑
efh
[0390]
=
↑
f_mh_act_l ratio_fsh*
↑
f_sh_act_l
[0391]
……
(31a)
[0392]
↑
emh
[0393]
=
↑
m_mh_act_l ratio_msh*
↑
m_sh_act_l
[0394]
……
(31b)
[0395]
在此,式(31a)、(31b)的系数ratio_fsh、ratio_msh分别为预先设定的规定值的系数(标量或对角矩阵)。另外,在本实施方式中,这些系数ratio_fsh、ratio_msh设定为互为相同的值。但是,也能够将ratio_fsh、ratio_msh设定为互不相同的值。
[0396]
在本实施方式中,由式(31a)定义的手部反作用力平移力偏差
↑
efh为零(
↑
f_mh_act_l=
‑
ratio_fsh*
↑
f_sh_act_l)是
↑
f_mh_act_l及
↑
f_sh_act_l相互的目标关系,由式
(31b)定义的手部反作用力力矩偏差
↑
emh为零(
↑
m_mh_act_l=
‑
ratio_msh*
↑
m_sh_act_l)是
↑
m_mh_act_l及
↑
m_sh_act_l相互的目标关系。
[0397]
而且,在步骤4
‑
1中,主操纵控制部94根据在所述步骤1取得的左侧的实际从动手部反作用力(
↑
f_sh_act_l、
↑
m_sh_act_r)、以及在所述步骤2取得的左侧的实际主动手部反作用力(
↑
f_mh_act_l、
↑
m_mh_act_l),并按照上述式(31a)、(31b)来算出手部反作用力偏差(
↑
efh、
↑
emh)。
[0398]
接下来,在步骤4
‑
2中,主操纵控制部94算出手部位置姿势偏差。该手部位置姿势偏差与所述上身位置姿势偏差同样地由与左侧的主动手部81l及从动手部21l各自的位置相关的手部位置偏差
↑
eph、以及与左侧的主动手部81l及从动手部21l各自的姿势(朝向)相关的手部姿势偏差
↑
ethh构成。
[0399]
而且,在本实施方式中,这些手部位置偏差
↑
eph及手部姿势偏差
↑
ethh与所述上身位置姿势偏差(
↑
epb、
↑
ethb)同样地定义。即,从动手部21l的位置
↑
p_sh_act_l和姿势角
↑
θ_sh_act分别将主动手部81l的位置
↑
p_mh_act_l乘以(1/ratio_psh)倍的位置、以及将该主动手部81l的姿势角
↑
θmh_act_l乘以(1/ratio_thsh)倍的角度作为目标而被控制。
[0400]
于是,在本实施方式中,作为手部位置偏差
↑
eph及手部姿势偏差
↑
rthh,分别使用由下式(32a)、(32b)的右边定义的指标值。
[0401]
↑
eph=
↑
p_mh_act_l
‑
ratio_psh*
↑
p_sh_act_l
[0402]
……
(32a)
[0403]
↑
ethh=
↑
θ_mh_act_l
‑
ratio_thsh*
↑
θ_sh_act_l
[0404]
……
(32b)
[0405]
在此,式(32a)、(32b)的系数ratio_psh、ratio_thsh分别是预先设定的规定值的系数(标量或对角矩阵)。另外,在本实施方式中,ratio_psh、ratio_thsh设定为互为相同的值。但是,也能够将ratio_psh、ratio_thsh设定为互不相同的值。
[0406]
在本实施方式中,由式(32a)定义的手部位置偏差
↑
eph为零(
↑
p_mh_act_l=ratio_psh*
↑
p_sh_act_l)是
↑
p_mh_act_l、
↑
p_sh_act_l相互的目标关系,
↑
eph的值表示从该目标关系的偏移程度(偏离程度)。另外,由式(32b)定义的手部姿势偏差
↑
ethh为零(
↑
θ_mh_act_l=ratio_thsh*
↑
θ_sh_act_l)是
↑
θ_mh_act_l、
↑
θ_sh_act_l相互的目标关系,
↑
ethh的值表示从该目标关系的偏移程度(偏离程度)。
[0407]
而且,在步骤4
‑
2中,主操纵控制部94根据在所述步骤1取得的实际从动手部运动中的左侧的从动手部21l的位置
↑
p_sh_act_l及姿势角
↑
θ_sh_act_l、以及在所述步骤2取得的实际主动手部运动中的左侧的主动手部81l的位置
↑
p_mb_act_l及姿势角
↑
θ_mb_act_l,并按照上述式(32a)、(32b)来算出手部位置姿势偏差(
↑
eph、
↑
ethh)。
[0408]
接下来,在步骤4
‑
3中,主操纵控制部94决定主动手部81l的平移加速度及角加速度各自的目标值即目标主动手部平移加速度
↑
acc_mh_aim_l及目标主动手部角加速度
↑
β_mh_aim_l、以及从动手部21l的平移加速度及角加速度各自的目标值即目标从动手部平移加速度
↑
acc_sh_aim_l及目标从动手部角加速度
↑
β_sh_aim_l,以使如上述那样算出的手部反作用力偏差及手部位置姿势偏差收敛为零。
[0409]
在该情况下,更详细而言,目标主动手部平移加速度
↑
acc_mh_aim_l及目标从动手部平移加速度
↑
acc_sh_aim_l决定为使手部反作用力平移力偏差
↑
efh及手部位置偏差
↑
eph
分别收敛为零。另外,目标主动手部角加速度
↑
β_mh_aim_l及目标从动手部角加速度
↑
β_sb_aim_l决定为使手部反作用力力矩偏差
↑
emh及手部姿势偏差
↑
ethh分别收敛为零。
[0410]
而且,决定目标主动手部平移加速度
↑
acc_mh_aim_l及目标从动手部平移加速度
↑
acc_sh_aim_l的方法、以及决定目标主动手部角加速度
↑
β_mh_aim_l及目标从动手部角加速度
↑
β_sh_aim_l的方法基本上在所述上身侧双边控制的处理(步骤3的处理)中,与决定目标上身支承部平移加速度
↑
acc_mb_aim及目标从动上身平移加速度
↑
acc_sb_aim的方法(或者决定目标上身支承部角加速度
↑
β_mb_aim及目标从动上身角加速度
↑
β_sb_aim的方法)同样。
[0411]
以下,简要地说明,关于决定目标主动手部平移加速度
↑
acc_mh_aim_l及目标从动手部平移加速度
↑
acc_sh_aim_l的处理,作为与所述式(3a)、(4a)、(6a)、(7a)、(10a)、(11a)分别对应的关系式,分别定义下式(33a)、(34a)、(36a)、(37a)、(40a)、(41a)。
[0412]
↑
f_mh_act_l=
‑
kfmh*
↑
p_mh_act_l
↑
cfmh
[0413]
……
(33a)
[0414]
↑
f_sh_act_l=
‑
kfsh*
↑
p_sh_act_l
↑
cfsh
[0415]
……
(34a)
[0416]
↑
uha=
‑
kfmh*
↑
p_mh_act_l
[0417]
‑
ratio_fsh*kfsh*
↑
p_sh_act_l
[0418]
……
(36a)
[0419]
↑
vha=
↑
p_mh_act_l
‑
ratio_psh*
↑
p_sh_act_l
[0420]
……
(37a)
[0421]
↑
efh_dotdot_aim
[0422]
=
‑
kfhp*
↑
efh
‑
kfhv*
↑
efh_dot
[0423]
……
(40a)
[0424]
↑
eph_dotdot_aim
[0425]
=
‑
kphp*
↑
eph
‑
kphv*
↑
eph_dot
[0426]
……
(41a)
[0427]
需要说明的是,式(33a)、(36a)的系数kfmh及式(34a)、(36a)的系数kfsh分别与式(3a)的系数kfmb、式(4a)的系数kfsb同样地是表示刚性的规定值的系数(标量或对角矩阵),式(33a)的
↑
cfmh及式(34a)的
↑
cfsh分别是常数向量。另外,式(40a)的系数kfhp、kfhv及式(41a)的系数kphp、kphv分别是规定值的增益(标量或对角矩阵)。
[0428]
而且,根据这些式(33a)、(34a)、(36a)、(37a)、(40a)、(41a)和所述式(31a)、(32a),能得到与所述式(16a)、(17a)、(20a)、(21a)分别对应的下式(46a)、(47a)、(50a)、(51a)。
[0429]
↑
uha_dotdot_aim=
‑
kfhp*
↑
efh
‑
kfhv*
↑
efh_dot
[0430]
……
(46a)
[0431]
↑
vha_dotdot_aim=
‑
kphp*
↑
eph
‑
kphv*
↑
eph_dot
[0432]
……
(47a)
[0433]
↑
acc_mh_aim_l
[0434]
=
‑
(rpsh/(kfmh*ratio_psh ratio_fsh*kfsh))
[0435]
*
↑
uha_dotdot_aim
[0436]
(ratio_fsh*kfsh/(kfmh*ratio_psh
[0437]
ratio_fsh*kfsh))*
↑
vha_dotdot_aim
[0438]
……
(50a)
[0439]
↑
acc_sh_aim
[0440]
=
‑
(1/(kfmh*ratio_psh ratio_fsh*kfsh))
[0441]
*
↑
uha_dotdot_aim
[0442]
‑
(kfmh/(kfmh*ratio_psh
[0443]
ratio_fsh*kfsh))*
↑
vha_dotdot_aim
[0444]
……
(51a)
[0445]
上述式(46a)、(47a)、(50a)、(51a)是用于决定左侧的目标主动手部平移加速度
↑
acc_mh_aim_l及目标从动手部平移加速度
↑
acc_sh_aim的式子。
[0446]
在该情况下,根据在步骤4
‑
1求出的手部反作用力平移力偏差
↑
efh、以及作为其时间上的变化率而求出的
↑
efh_dot,并按照式(46a)来算出
↑
uha_dotdot_aim。另外,根据在步骤4
‑
2中求出的手部位置偏差
↑
eph、以及作为其时间上的变化率而求出的
↑
eph_dot,并按照式(47a)来算出
↑
vha_dotdot_aim。
[0447]
而且,根据这些
↑
uha_dotdot_aim、
↑
vha_dotdot_aim的算出值并按照式(50a)、(51a),来算出左侧的目标主动手部平移加速度
↑
acc_mh_aim_l及目标从动手部平移加速度
↑
acc_sh_aim_l。由此,决定
↑
acc_mh_aim_l、
↑
acc_sh_aim_l,以使手部反作用力平移力偏差
↑
efh和手部位置偏差
↑
eph收敛为零。
[0448]
进行补充说明,根据式(31a)、(32a)、对式(31a)、(32a)各自的两边进行微分而得到的关系式、以及式(46a)、(47a),得到下式(52a)、(53a)。
[0449]
↑
uha_dotdot_aim
[0450]
=
‑
kfhp*
↑
efh
‑
kfhv*
↑
efh_dot
[0451]
=
‑
kfhp*(
↑
f_mh_act_l ratio_fsh*
↑
f_sh_act_l)
[0452]
‑
kfhv*(
↑
f_mh_dot_act_l ratio_fsh*
↑
f_sh_dot_act)
[0453]
……
(52a)
[0454]
↑
vha_dotdot_aim
[0455]
=
‑
kphp*
↑
eph
‑
kphv*
↑
eph_dot
[0456]
=
‑
kphp*(
↑
p_mh_act_l
‑
ratio_psh*
↑
p_sh_act_l)
[0457]
‑
kphv*(
↑
p_mh_dot_act_l
‑
ratio_psh*
↑
p_sh_dot_act_l)
[0458]
=
‑
kphp*(
↑
p_mh_act_l
‑
ratio_psh*
↑
p_sh_act_l)
[0459]
‑
kphv*(
↑
v_mh_act_l
‑
ratio_psh*
↑
v_sh_act_l)
[0460]
……
(53a)
[0461]
因此,也能够根据在所述步骤2取得的左侧的实际主动手部反作用力的平移力
↑
f_mh_act_l、在所述步骤1取得的左侧的实际从动手部反作用力的平移力
↑
f_sh_act_l的各自、以及作为它们的一阶微分值(时间上的变化率)而求出的
↑
f_mh_dot_act_l、
↑
f_sh_dot_act,并按照式(52a)来算出
↑
uha_dotdot_aim。
[0462]
另外,也能够根据在所述步骤2取得的左侧的主动手部运动中的位置
↑
p_mh_act_l
及平移速度
↑
v_mh_act_l、以及在所述步骤1取得的左侧的实际从动手部运动中的位置
↑
p_sh_act_l及平移速度
↑
v_sh_act_l,并按照式(53a)来算出
↑
vha_dotdot_aim。在这样的情况下,在步骤4
‑
1及4
‑
2的各个步骤中不需要算出手部平移力偏差
↑
efh和手部位置偏差
↑
eph的处理。
[0463]
而且,也能够通过综合式(46a)、(47a)的组或式(52a)、(53a)的组、以及式(50a)、(51a)的组而得到的关系式(不包含
↑
uha_dotdot_aim、
↑
vha_dotdot_aim的关系式),来算出
↑
acc_mh_aim_l、
↑
acc_sh_aim_l。
[0464]
另外,关于决定目标主动手部角加速度
↑
β_mh_aim_l及目标从动手部角加速度
↑
β_sh_aim_l的处理,作为与所述式(3b)、(4b)、(6b)、(7b)、(10b)、(11b)分别对应的关系式而分别定义下式(33b)、(34b)、(36b)、(37b)、(40b)、(41b)。
[0465]
↑
m_mh_act_l=
‑
kmmh*
↑
θ_mh_act_l
↑
cmmh
[0466]
……
(33b)
[0467]
↑
m_sh_act_l=
‑
kmsh*
↑
θ_sh_act_l
↑
cmsh
[0468]
……
(34b)
[0469]
↑
uhb=
‑
kmmh*
↑
θ_mh_act_l
[0470]
‑
ratio_msh*kmsh*
↑
θ_sh_act_l
[0471]
……
(36b)
[0472]
↑
vhb=
↑
θ_mh_act_l
‑
ratio_thsh*
↑
θ_sh_act_l
[0473]
……
(37b)
[0474]
↑
emh_dotdot_aim
[0475]
=
‑
kmhp*
↑
emh
‑
kmhv*
↑
emh_dot
[0476]
……
(40b)
[0477]
↑
ethh_dotdot_aim
[0478]
=
‑
kthhp*
↑
ethh
‑
kthhv*
↑
ethh_dot
[0479]
……
(41b)
[0480]
需要说明的是,式(33b)、(36b)的系数kmmh及式(34b)、(36b)的系数kmsh分别与式(3b)的系数kmmb、式(4b)的系数kmsb同样地是表示刚性的规定值的系数(标量或对角矩阵),式(33b)的
↑
cmmh及式(34b)的
↑
cmsh分别是常数向量。另外,式(40b)的系数kmhp、kmhv及式(41b)的系数kthhp、kthhv分别是规定值的增益(标量或对角矩阵)。
[0481]
而且,根据这些式(33b)、(34b)、(36b)、(37b)、(40b)、(41b)和所述式(31b)、(32b),能得到与所述式(16b)、(17b)、(20b)、(21b)分别对应的下式(46b)、(47b)、(50b)、(51b)。
[0482]
↑
uhb_dotdot_aim=
‑
kmhp*
↑
emh
‑
kmhv*
↑
emh_dot
[0483]
……
(46b)
[0484]
↑
vhb_dotdot_aim=
‑
kthhp*
↑
ethh
‑
kthhv*
↑
ethh_dot
[0485]
……
(47b)
[0486]
↑
β_mh_aim_l
[0487]
=
‑
(ratio_thsh/(kmmh*ratio_thsh ratio_msh*kmsh))
[0488]
*
↑
uhb_dotdot_aim
[0489]
(ratio_msh*kmsh/(kmmh*ratio_thsh
[0490]
ratio_msh*kmsh))*
↑
vhb_dotdot_aim
[0491]
……
(50b)
[0492]
↑
β_sh_aim
[0493]
=
‑
(1/(kmmh*ratio_thsh ratio_msh*kmsh))
[0494]
*
↑
uhb_dotdot_aim
[0495]
‑
(kmmh/(kmmh*ratio_thsh ratio_msh*kthsh))
[0496]
*
↑
vhb_dotdot_aim
[0497]
……
(51b)
[0498]
上述式(46b)、(47b)、(50b)、(51b)是用于决定左侧的目标主动手部角加速度
↑
β_mh_aim_l及目标从动手部角加速度
↑
β_sh_aim的式子。
[0499]
在该情况下,根据在步骤4
‑
1求出的手部反作用力力矩偏差
↑
emh、以及作为其时间上的变化率而求出的
↑
emh_dot,并按照式(46b)来算出
↑
uhb_dotdot_aim。另外,根据在步骤4
‑
2求出的手部姿势偏差
↑
ethh、以及作为其时间上的变化率而求出的
↑
ethh_dot,并按照式(47b)来算出
↑
vhb_dotdot_aim。
[0500]
而且,根据这些
↑
uhb_dotdot_aim、
↑
vhb_dotdot_aim的算出值,并按照式(50b)、(51b)来算出左侧的目标主动手部角加速度
↑
β_mh_aim_l及目标从动手部角加速度
↑
β_sh_aim_l。由此,决定
↑
β_mh_aim_l、
↑
β_sh_aim_l,以使手部反作用力力矩偏差
↑
emh和手部姿势偏差
↑
ethh收敛为零。
[0501]
进行补充说明,根据式(31b)、(32b)、对式(31b)、(32b)各自的两边微分而得到的关系式、以及式(46b)、(47b),能得到下式(52b)、(53b)。
[0502]
↑
uhb_dotdot_aim
[0503]
=
‑
kmhp*
↑
emh
‑
kmhv*
↑
emh_dot
[0504]
=
‑
kmhp*(
↑
m_mh_act_l ratio_msh*
↑
m_sh_act_l)
[0505]
‑
kmhv*(
↑
m_mh_dot_act_l ratio_msh*
↑
m_sh_dot_act)
[0506]
……
(52b)
[0507]
↑
vhb_dotdot_aim
[0508]
=
‑
kthhp*
↑
ethh
‑
kthhv*
↑
ethh_dot
[0509]
=
‑
kthhp*(
↑
θ_mh_act_l
‑
ratio_thsh*
↑
θ_sh_act_l)
[0510]
‑
kthhv*(
↑
θ_mh_dot_act_l
‑
ratio_thsh*
↑
θ_sh_dot_act_l)
[0511]
=
‑
kthhp*(
↑
θ_mh_act_l
‑
ratio_thsh*
↑
θ_sh_act_l)
[0512]
‑
kthhv*(
↑
ω_mh_act_l
‑
ratio_thsh*
↑
ω_sh_act_l)
[0513]
……
(53b)
[0514]
因此,也能够根据在所述步骤2取得的左侧的实际主动手部反作用力的力矩
↑
m_mh_act_l、在所述步骤1取得的左侧的实际从动手部反作用力的力矩
↑
m_sh_act_l的各自、以及作为它们的一阶微分值(时间上的变化率)而求出的
↑
m_mh_dot_act_l、
↑
m_sb_dot_act,并按照式(52b)来算出
↑
uhb_dotdot_aim。
[0515]
另外,也能够根据在所述步骤2取得的左侧的主动手部运动中的姿势角
↑
θ_mh_act_l及角速度
↑
ω_mh_act_l、以及在所述步骤1取得的左侧的实际从动手部运动中的姿势
角
↑
θ_sh_act_l及角速度
↑
ω_sh_act_l,并按照式(53b)来算出
↑
vhb_dotdot_aim。在这样的情况下,在步骤4
‑
1及4
‑
2的各个步骤中不需要算出手部力矩力偏差
↑
emh和手部姿势偏差
↑
ethh的处理。
[0516]
而且,也能够通过综合式(46b)、(47b)的组或式(52b)、(53b)的组、以及式(50b)、(51b)的组而得到的关系式(不包含
↑
uhb_dotdot_aim、
↑
vhb_dotdot_aim的关系式),来算出
↑
β_mh_aim_l、
↑
β_sh_aim_l。
[0517]
在本实施方式中,步骤4
‑
3的处理如上述那样执行。
[0518]
接下来,在步骤4
‑
4中,主操纵控制部94通过对如上述那样决定的目标主动手部平移加速度
↑
acc_mh_aim_l、目标主动手部角加速度
↑
β_mh_aim_l、目标从动手部平移加速度
↑
acc_sh_aim及目标从动手部角加速度
↑
β_sh_aim分别进行积分的处理,来决定左侧的主动手部81l的目标平移速度即目标主动手部平移速度
↑
v_mb_aim_l、该主动手部81l的目标角速度即目标主动手部角速度
↑
ω_mh_aim_l、左侧的从动手部21l的目标平移速度即目标从动手部平移速度
↑
v_sh_aim_l、以及该从动手部21l的目标角速度即目标从动手部角速度
↑
ω_sh_aim_l。
[0519]
与左侧的主动手部81l及从动手部21l的组相关的步骤4的手部侧双边控制的处理如以上那样执行。
[0520]
步骤4的手部侧双边控制的处理关于右侧的主动手部81r及右侧的从动手部21r的组也与上述同样地进行。在该情况下,通过将与左侧的主动手部81l及从动手部21l的组相关的上述的说明中的“左侧”、“l”分别置换为“右侧”、“r”,来说明与右侧的主动手部81r及右侧的从动手部21r的组相关的处理。
[0521]
步骤4的手部侧双边控制的处理如以上那样执行。由此,决定作为左右的主动手部81l、81r各自的目标运动(以后称作目标主动手部运动)的构成要素的目标主动手部平移速度
↑
v_mh_aim_l、
↑
v_mh_aim_r及目标主动手部角速度
↑
ω_mh_aim_l、
↑
ω_mh_aim_r,并且决定作为左右的从动手部21l、21r各自的目标运动(以后称作目标从动手部运动)的构成要素的目标从动手部平移速度
↑
v_sh_aim_l、
↑
v_sh_aim_r及目标从动手部角速度
↑
ω_sh_aim_l、
↑
ω_sh_aim_r。
[0522]
返回图6,主操纵控制部94接下来在步骤5中输出主动装置51的目标运动即目标主动运动。该目标主动运动由在步骤3中决定的目标上身支承部运动(
↑
v_mb_aim、
↑
ωmb_aim)和在步骤4中决定的目标主动手部运动(
↑
v_mh_aim_l、
↑
ω_mh_aim_l、
↑
v_mh_aim_r、
↑
ω_mh_aim_r)构成。而且,如图5所示那样,目标上身支承部运动由主动移动控制部92赋予,目标主动手部运动由主动机械手控制部93赋予。
[0523]
而且,在步骤6中,主操纵控制部94输出从动装置1的目标运动即目标从动运动。该目标从动运动由在步骤3中决定的目标从动上身运动(
↑
v_sb_aim、
↑
ωsb_aim)和在步骤4中决定的目标从动手部运动(
↑
v_sh_aim_l、
↑
ω_sh_aim_l、
↑
v_sh_aim_r、
↑
ω_sh_aim_r)来构成。而且,如图2所示那样,目标从动上身运动由从动移动控制部42赋予,目标从动手部运动由从动机械手控制部43赋予。
[0524]
以上是主操纵控制部94的处理。
[0525]
[从动移动控制部的控制处理]
[0526]
接着,参照图9来说明从动控制装置41的从动移动控制部42的控制处理。从动移动
控制部42以规定的控制处理周期逐次执行图9的流程图所示的处理。在步骤10中,从动移动控制部42从主操纵控制部94经由通信装置40、90而取得(接收)目标从动上身运动(
↑
vsb_aim、
↑
ωsb_aim)。
[0527]
而且,从动移动控制部42取得通过从动上身力检测器33的输出而示出的从动上身力检测值、按各从动移动驱动机构5中的每个从动移动驱动机构通过马达旋转检测器27的输出而示出的电动马达5a、5b各自的旋转角的检测值即从动马达旋转角检测值、以及通过从动滑动位移检测器29的输出而示出的滑动构件32的上下方向上位移的检测值即从动滑动位移检测值。需要说明的是,上述从动上身力检测值是在对从动上身力检测器33设定的传感器坐标系中观察时的平移力及力矩的检测值。
[0528]
接下来,在步骤11中,从动移动控制部42根据在步骤10中取得的从动上身力检测值来求取实际从动上身反作用力。具体而言,从动移动控制部42通过将从动上身力检测器33的传感器坐标系中的从动上身力检测值变换为在从动上身坐标系cs中观察时的平移力及力矩的组,从而求取实际从动上身反作用力。
[0529]
在该情况下,上述从动上身坐标系cs是对从动上身设定的本地坐标系,例如是如图1所示那样设定x轴方向、y轴方向、z轴方向的3轴直角坐标系cs。需要说明的是,该从动上身坐标系cs的原点例如设定于所述从动基准点qs(从动上身的代表点)(参照图11的(a))。
[0530]
而且,在步骤11中求取的实际从动上身反作用力的力矩
↑
m_sb_act是绕从动上身坐标系cs的原点(从动基准点qs)的力矩。以后,在步骤11中求取的、在从动上身坐标系cs中观察时的实际从动上身反作用力的平移力的参照附图标记记作
↑
f_sb_local_act,力矩的参照附图标记记作
↑
m_sb_local_act。
[0531]
接下来,在步骤12中,从动移动控制部42使用在步骤10中取得的从动马达旋转角检测值和从动滑动位移检测值,来求取实际从动上身运动。具体而言,首先,从动移动控制部42按各从动移动驱动机构5中的每个从动移动驱动机构,通过求取电动马达5a、5b各自的从动马达旋转角检测值的时间上的变化率的微分处理,来求取作为该电动马达5a、5b各自的旋转轴的实际的旋转速度(角速度)的观测值的实际马达旋转速度。在该情况下,为了抑制从动马达旋转角检测值的高频噪声分量的影响,作为上述微分处理而优选使用伪微分(换言之,不完全微分)的处理。
[0532]
在以后的说明中,作为表示与从动装置1的4个移动接地部4(n)(n=1,2,3,4)分别对应的从动移动驱动机构5的电动马达5a、5b各自的实际马达旋转速度的参照附图标记,分别使用ω_sw_mota_act(n)、ω_sw_motb_act(n)(n=1,2,3,4)。
[0533]
而且,从动移动控制部42按各从动移动接地部4(n)中的每个从动移动接地部,根据电动马达5a、5b各自的实际马达旋转速度ω_sw_mota_act(n)、ω_sw_motb_act(n),并通过下式(61a)、(61b)来算出所述从动上身坐标系cs的x轴方向(前后方向)上的移动接地部4(n)的平移速度v_sw_local_x_act(n)、以及该从动上身坐标系cs的y轴方向(左右方向)上的移动接地部4(n)的平移速度v_sw_local_y_act(n)。
[0534]
v_sw_local_x_act(n)
[0535]
=cswx*(ω_sw_mota_act(n) ω_sw_motb_act(n))
[0536]
……
(61a)
[0537]
v_sw_local_y_act(n)
[0538]
=cswy*(ω_sw_mota_act(n)
‑
ω_sw_motb_act(n))
[0539]
……
(61b)
[0540]
需要说明的是,上述系数cswx、cswy分别是依存于从动移动驱动机构5的构造等而规定的规定值的系数。
[0541]
而且,从动移动控制部42如下式(62a)、(62b)所示那样,求取4个移动接地部4(1)~4(4)各自的x轴方向上的平移速度v_sw_local_x_act(1)~v_sw_local_x_act(4)的平均值作为从动上身坐标系cs的x轴方向上的从动上身的平移速度v_sb_local_x_act,并且求取4个移动接地部4(1)~4(4)各自的y轴方向上的平移速度v_sw_local_y_act(1)~v_sw_local_y_act(4)的平均值作为从动上身坐标系cs的y轴方向上的从动上身的平移速度v_sb_local_y_act。
[0542]
v_sb_local_x_act
[0543]
=(v_sw_local_x_act(1) v_sw_local_x_act(2)
[0544]
v_sw_local_x_act(3) v_sw_local_x_act(4))/4
[0545]
……
(62a)
[0546]
v_sb_local_y_act
[0547]
=(v_sw_local_y_act(1) v_sw_local_y_act(2)
[0548]
v_sw_local_y_act(3) v_sw_local_y_act(4))/4
[0549]
……
(62b)
[0550]
另外,从动移动控制部42通过下式(63)来算出绕从动上身坐标系cs的z轴方向(上下方向)的轴的方向上的从动基台3的角速度ω_sb_local_z_act。
[0551]
ω_sb_local_z_act
[0552]
=(v_sw_local_x_act(1)
‑
v_sw_local_x_act(4))
[0553]
/(2*(lswy(1) lswy(4)))
[0554]
(v_sw_local_x_act(2)
‑
v_sw_local_x_act(3))
[0555]
/(2*(lswy(2) lswy(3)))
[0556]
……
(63)
[0557]
上述式(63)的lswy(1)、lswy(2)、lswy(3)、lswy(4)分别如图11的(a)所示那样是从动基准点qs与从动基台3的左侧前部的移动接地部4(1)、左侧后部的移动接地部4(2)、右侧后部的移动接地部4(3)及右侧前部的移动接地部4(4)各自的接地部分之间的y轴方向(左右方向)的距离。需要说明的是,在该情况下,lswy(1)、lswy(2)、lswy(3)、lswy(4)各自的正负的极性定义为lswy(1)>0、lswy(2)>0、lswy(3)<0、lswy(4)<0。
[0558]
在此,在本实施方式中,从动侧全球坐标系(3轴直角坐标系)的3个坐标轴向(x轴方向、y轴方向、z轴方向)中的z轴方向设定为与从动上身坐标系cs的z轴方向同向(上下方向)。因此,通过上述式(63)算出的角速度ω_sb_local_z_act与在从动侧全球坐标系中观察时的实际从动上身运动的角速度
↑
ω_sb_act中的绕z轴的方向的角速度ω_sb_z_act一致。因此,通过式(63)求取实际从动上身运动的角速度
↑
ω_sb_act中的绕z轴的方向的角速度ωsb_z_act。
[0559]
而且,从动移动控制部42进一步通过对如上述那样的求出的角速度ω_sb_z_act进行积分的处理,来算出在从动侧全球坐标系中观察时的实际从动上身运动的姿势角
↑
θ_
sb_act中的绕z轴的方向的姿势角θ_sb_z_act。
[0560]
需要说明的是,在本实施方式中,省略实际从动上身运动的角速度
↑
ω_sb_act中的、从动侧全球坐标系的绕x轴的方向的角速度、以及绕y轴的方向的角速度的算出(换言之,绕与上下方向正交的方向(横向)的轴的角速度的算出)。这对于实际从动上身运动的姿势角
↑
θ_sb_act也同样。
[0561]
而且,从动移动控制部42将通过所述式(62a)、(62b)而求出的v_sb_local_x_act、v_sb_local_y_act设为2分量的向量(从动上身坐标系cs的xy坐标平面上的二维向量)以改变与如上述那样求出的绕z轴的方向的姿势角θ_sb_z_act(
↑
θ_sb_act的绕z轴的方向的分量)一致的角度的方式,沿着绕z轴的方向旋转变换,由此求取在从动侧全球坐标系中观察时的实际从动上身运动的平移速度
↑
v_sb_act中的除了z轴方向以外的分量(从动侧全球坐标系的x轴方向上的平移速度v_sb_x_act及y轴方向上的平移速度v_sb_y_act)。
[0562]
而且,通过对这些平移速度v_sb_x_ac、v_sb_y_act积分,来求取实际从动上身运动的位置
↑
p_sb_act中的x轴方向上的位置p_sb_x_act和y轴方向上的位置p_sb_y_act。
[0563]
另外,从动移动控制部42根据在步骤10中取得的从动滑动位移检测值,来求取实际从动上身运动的位置
↑
p_sb_act中的z轴方向上的位置p_sb_z_act,而且通过求取p_sb_z_act的时间上的变化率的微分处理,来求取实际从动上身运动的平移速度
↑
v_sb_act中的z轴方向上的平移速度v_sb_z_act。
[0564]
在本实施方式中,通过以上说明的步骤12的处理,来求取实际从动上身运动(位置
↑
p_sb_act、平移速度
↑
v_sb_act、姿势角
↑
θ_sb_act、角速度
↑
ω_sb_act)。进行补充说明,实际从动上身运动中的位置
↑
p_sb_act及姿势角
↑
θ_sb_act也可以为了防止积分误差的累积而基于从动装置1的周围的界标等环境识别信息随时修正。
[0565]
接下来,在步骤13中,从动移动控制部42根据目标从动上身运动,来决定从动移动机构2的各移动接地部4的目标平移速度,并控制与各移动接地部4对应的电动马达5a、5b,以实现该目标平移速度。具体而言,从动移动控制部42通过将由在步骤10取得的目标从动上身运动的平移速度
↑
v_sb_aim中的x轴方向上的平移速度v_sb_x_aim及y轴方向上的平移速度v_sb_y_aim构成的向量(从动侧全球坐标系的xy坐标平面上的二维向量)以变换在步骤10取得的目标从动上身运动的姿势角
↑
θ_sb_aim的绕z轴的方向的分量θ_sb_z_aim的(
‑
1)倍的角度(=
‑
θ_sb_z_aim)的方式,沿着绕z轴的方向旋转变换,由此求取从动上身坐标系cs的x轴方向上的从动上身的目标平移速度v_sb_local_x_aim、以及从动上身坐标系cs的y轴方向上的从动上身的目标平移速度v_sb_local_y_aim。
[0566]
而且,从动移动控制部42通过下式(64a)、(64b),来决定在从动上身坐标系cs中观察时的各移动接地部4(n)(n=1,2,3,4)的x轴方向上的目标平移速度v_sw_local_x_aim(n)和y轴方向上的目标平移速度v_sw_local_y_aim(n),以实现在从动上身坐标系cs中的上述目标平移速度v_sb_local_x_aim、v_sb_local_y_aim、以及在从动侧全球坐标系中观察时的目标从动上身运动的角速度
↑
ω_sb_aim中的绕z轴的方向的分量ω_sb_z_aim。
[0567]
v_sw_local_x_aim(n)
[0568]
=v_sb_local_x_aim
‑
lswy(n)*ω_sb_z_aim
[0569]
……
(64a)
[0570]
v_sw_local_y_aim(n)
[0571]
=v_sb_local_y_aim lswx(n)*ω_sb_z_aim
[0572]
……
(64b)
[0573]
而且,从动移动控制部42按各移动接地部4(n)中的每个移动接地部,通过由所述式(61a)、(61b)得到的下式(65a)、(65b),来算出用于实现上述目标平移速度v_sw_local_x_aim(n)、v_sw_local_y_aim(n)的电动马达5a、5b各自的旋转速度的目标值即目标马达旋转速度ω_sw_mota_aim(n)、ω_sw_motb_aim(n)。
[0574]
ω_sw_mota_aim(n)
[0575]
=(cswy*v_sw_local_x_aim(n) cswx*v_sw_local_y_aim(n))
[0576]
/(2*cswx*cswy)
[0577]
……
(65a)
[0578]
ω_sw_motb_aim(n)
[0579]
=(cswy*v_sw_local_x_aim(n)
‑
cswx*v_sw_local_y_aim(n))
[0580]
/(2*cswx*cswy)
[0581]
……
(65b)
[0582]
接下来,从动移动控制部42按各移动接地部4(n)的每个移动接地部,通过下式(66a)、(66b)来决定用于使电动马达5a、5b各自的实际马达旋转速度ω_sw_mota_act(n)、ω_sw_motb_act(n)追随目标马达旋转速度ω_sw_mota_aim(n)、ω_sw_motb_aim(n)的电动马达5a、5b各自的驱动力(旋转驱动力)的目标值即目标马达驱动力tq_sw_mota_aim(n)、tq_sw_motb_aim(n)。这些目标马达驱动力tq_sw_mota_aim(n)、tq_sw_motb_aim(n)(n=1,2,3,4)是图2所示的目标从动移动驱动力。
[0583]
tq_sw_mota_aim(n)
[0584]
=kv_sw_mota*(ω_sw_mota_aim(n)
‑
ω_sw_mota_act(n))
[0585]
……
(66a)
[0586]
tq_sw_motb_aim(n)
[0587]
=kv_sw_motb*(ω_sw_motb_aim(n)
‑
ω_sw_motb_act(n))
[0588]
……
(66b)
[0589]
需要说明的是,kv_sw_mota、kv_sw_motb是规定值的增益。进行补充说明,式(66a)、(66b)是通过作为反馈控制律的一例的比例律来决定tq_sw_mota_aim(n)、tq_sw_motb_aim(n)的式子,但也可以通过其他的反馈控制律(例如比例
·
微分律等)来决定tq_sw_mota_aim(n)、tq_sw_motb_aim(n)。
[0590]
接下来,从动移动控制部42使与各移动接地部4(n)对应的电动马达5a、5b分别工作,以输出如上述那样决定的目标马达驱动力tq_sw_mota_aim(n)、tq_sw_motb_aim(n)。由此,进行从动移动机构2的移动控制,以实现目标从动上身运动的平移速度
↑
v_sb_aim中的x轴方向上的平移速度v_sb_x_aim及y轴方向上的平移速度v_sb_y_aim。
[0591]
在本实施方式中,根据以上说明的步骤13的处理,作为从动移动机构2的目标从动移动驱动力,与各移动接地部4(n)对应的电动马达5a、5b的目标马达驱动力tq_sw_mota_aim(n)、tq_sw_motb_aim(n)决定为能够实现目标从动上身运动中的除了z轴方向(上下方向)上的平移速度以外的运动。而且,控制与各移动接地部4(n)对应的电动马达5a、5b,以产生该目标马达驱动力tq_sw_mota_aim(n)、tq_sw_moto_aim(n)。由此,进行从动移动机构2
的移动控制,以实现目标从动上身运动中的除了z轴方向(上下方向)上的平移速度以外的运动。
[0592]
接下来,在步骤14中,从动移动控制部42控制从动滑动驱动致动器36,以实现目标从动上身运动的平移速度
↑
v_sb_aim中的z轴方向(上下方向)上的平移速度v_sb_z_aim。具体而言,从动移动控制部42根据在步骤10取得的目标从动运动的平移速度
↑
v_sb_aim中的z轴方向上的平移速度v_sb_z_aim与在步骤12求出的实际从动上身运动的平移速度
↑
v_sb_act中的z轴方向上的平移速度vsb_z_act之间的偏差,通过比例律或比例
·
微分律等反馈控制律,来决定滑动驱动致动器36的目标驱动力。由此,决定滑动驱动致动器36的目标驱动力,以使上述偏差接近零。而且,从动移动控制部42控制滑动驱动致动器36,以产生该目标驱动力。
[0593]
接下来,在步骤15中,从动移动控制部42将在步骤11求出的实际从动上身反作用力(
↑
f_sb_local_act、
↑
m_sb_local_act)、以及在步骤12求出的实际从动上身运动(
↑
v_sb_act、
↑
p_sb_act、
↑
ω_sb_act、
↑
θ_sb_act)向主操纵控制部94输出(发送)。从动移动控制部42的处理如以上那样执行。
[0594]
进行补充说明,在步骤15向主操纵控制部94输出的实际从动上身反作用力(
↑
f_sb_local_act、
↑
m_sb_local_act)是在从动上身坐标系cs中观察时的实际从动上身反作用力,因此在主操纵控制部94中使用从从动移动控制部42输入的实际从动上身反作用力连同从从动移动控制部42输入的实际从动上身运动的位置
↑
p_sb_act及姿势角
↑
θ_sb_act,并将其变换为在从动侧全球坐标系中观察时的实际从动上身反作用力(
↑
f_sb_act、
↑
m_sb_act)。而且,使用该变换后的实际从动上身反作用力来执行所述的处理。
[0595]
但是,将在从动上身坐标系cs中观察时的实际从动上身反作用力变换为在从动侧全球坐标系中观察时的实际从动上身反作用力这一处理,也可以由从动移动控制部42执行。在该情况下,不需要主操纵控制部94中的该变换的处理。
[0596]
[主动移动控制部的控制处理]
[0597]
接着,参照图10来说明主控制装置91的主动移动控制部92的控制处理。需要说明的是,主动移动控制部92的控制处理与所述从动移动控制部42的控制处理同样,因此省略与一部分的处理相关的详细的说明。
[0598]
主动移动控制部92以规定的控制处理周期逐次执行图10的流程图所示的处理。在步骤20中,主动移动控制部92从主操纵控制部94取得目标上身支承部运动(
↑
vmb_aim、
↑
ωmb_aim),并且取得通过主动上身力检测器64的输出而示出的主动上身力检测值、按各主动移动驱动机构55的每个主动移动驱动机构通过马达旋转检测器87的输出而示出的电动马达55a、55b各自的旋转角的检测值即主动马达旋转角检测值、以及通过主动滑动位移检测器89的输出而示出的滑动构件62的上下方向上的位移的检测值即主动滑动位移检测值。需要说明的是,上述主动上身力检测值是在对主动上身力检测器64设定的传感器坐标系中观察时的平移力及力矩的检测值。
[0599]
接下来,在步骤21中,主动移动控制部92根据在步骤20取得的主动上身力检测值来求取实际上身支承部反作用力。具体而言,主动移动控制部92将主动上身力检测器64的传感器坐标系中的主动上身力检测值变换为在主动上身坐标系cm中观察时的平移力及力矩的组,由此求取实际上身支承部反作用力。
[0600]
在该情况下,上述主动上身坐标系cm是对上身支承部65设定的本地坐标系,例如是如图3或图4所示的设定x轴方向、y轴方向、z轴方向的3轴直角坐标系cm。需要说明的是,该主动上身坐标系cm的原点例如设定于所述主动基准点qm(上身支承部65的代表点)(参照图11的(b))。而且,在步骤21求取的实际上身支承部反作用力的力矩是绕主动上身坐标系cm的原点(主动基准点qm)的力矩。以后,将在步骤21求取的、在主动上身坐标系cm中观察时的实际上身支承部反作用力的平移力的参照附图标记记作
↑
f_mb_local_act,将力矩的参照附图标记记作
↑
m_mb_local_act。
[0601]
接下来,在步骤22中,主动移动控制部92使用在步骤20取得的主动马达旋转角检测值和主动滑动位移检测值,来求取实际上身支承部运动。该步骤22的处理与从动移动控制部42所涉及的步骤12的处理同样地进行。
[0602]
在该情况下,通过将与步骤12的处理相关的所述的说明中的“从动”、“从动上身”、“从动装置1”、“从动移动控制部42”、“基台3”、“移动接地部4”、“移动驱动机构5”、“电动马达5a、5b”、“图11的(a)”、“步骤10”分别改称作“主动”、“上身支承部”(或“上身支承部65”)、“主动装置51”、“主动移动控制部92”、“基台53”、“移动接地部54”、“移动驱动机构55”、“电动马达55a、55b”、“图11的(b)”、“步骤20”,并且将参照附图标记的“s”置换为“m”,从而成为步骤22的说明。
[0603]
在本实施方式中,通过所涉及的步骤22的处理,来求取实际上身支承部运动(位置
↑
p_mb_act、平移速度
↑
v_mb_act、姿势角
↑
θ_mb_act、角速度
↑
ω_mb_act)。需要说明的是,在本实施方式中,省略实际上身支承部运动的角速度
↑
ω_sb_act中的、绕主动侧全球坐标系的x轴的方向的角速度和绕y轴的方向的角速度的算出(换言之,绕与上下方向正交的方向(横向)的轴的角速度的算出)。这对于实际上身支承部运动的姿势角
↑
θ_mb_act也同样。
[0604]
进行补充说明,实际上身支承部运动中的位置
↑
p_mb_act及姿势角
↑
θ_mb_act也可以为了防止积分误差的累积而基于主动装置51的周围的界标等环境识别信息随时修正。
[0605]
接下来,在步骤23中,主动移动控制部92根据目标上身支承部运动来决定主动移动机构52的各移动接地部54的目标平移速度,并控制与各移动接地部54对应的电动马达55a、55b,以实现该目标平移速度。该步骤23的处理与从动移动控制部42所涉及的步骤13的处理同样地进行。在该情况下,通过将与步骤13的处理相关的所述的说明中的“从动”等名称与步骤22的情况同样地改称,并且将参照附图标记中的“s”置换为“m”,从而成为步骤23的说明。
[0606]
在本实施方式中,通过所涉及的步骤23的处理,作为主动移动机构52的目标主动移动驱动力,与各移动接地部54(n)对应的电动马达55a、55b的目标马达驱动力tq_mw_mota_aim(n)、tq_mw_motb_aim(n)决定为能够实现目标上身支承部运动中的除了z轴方向(上下方向)上的平移速度以外的运动。而且,控制与各移动接地部54(n)对应的电动马达55a、55b,以产生该目标马达驱动力tq_mw_mota_aim(n)、tq_mw_motb_aim(n)。由此,进行主动移动机构52的移动控制,以实现目标上身支承部运动中的除了z轴方向(上下方向)上的平移速度以外的运动。
[0607]
接下来,在步骤24中,主动移动控制部92控制主动滑动驱动致动器66,以实现目标上身支承部运动的平移速度
↑
v_mb_aim中的z轴方向(上下方向)上的平移速度v_mb_z_aim。具体而言,主动移动控制部92与从动移动控制部42所涉及的步骤14的处理同样地根据目标
上身支承部平移速度
↑
v_mb_aim的z轴方向的分量v_mb_z_aim与在步骤22求出的实际上身支承部运动的平移速度
↑
v_mb_act的z轴方向上的平移速度vmb_z_act之间的偏差来决定滑动驱动致动器66的目标驱动力,以使该偏差接近零。而且,主动移动控制部92控制滑动驱动致动器66,以产生该目标驱动力。
[0608]
接下来,在步骤25中,主动移动控制部92将在步骤21求出的实际上身支承部反作用力(
↑
f_mb_local_act、
↑
m_mb_local_act)和在步骤22求出的实际上身支承部运动(
↑
v_mb_act、
↑
p_mb_act、
↑
ω_mb_act、
↑
θ_mb_act)向主操纵控制部94输出。主动移动控制部92的处理如以上那样执行。
[0609]
进行补充说明,在步骤25向主操纵控制部94输出的实际上身支承部反作用力(
↑
f_mb_local_act、
↑
m_mb_local_act)是在主动上身坐标系cm中观察时的实际上身支承部反作用力,因此在主操纵控制部94中使用从主动移动控制部92输入的实际上身支承部反作用力连同从主动移动控制部92输入的实际上身支承部运动的位置
↑
p_mb_act及姿势角
↑
θ_mb_act,并将其变换为在主动侧全球坐标系中观察时的实际上身支承部反作用力(
↑
f_mb_act、
↑
m_mb_act)。而且,使用该变换后的实际上身支承部反作用力来执行所述的处理。
[0610]
但是,将在主动上身坐标系cm中观察时的实际上身支承部反作用力变换为在主动侧全球坐标系中观察时的实际上身支承部反作用力这一处理,也可以由主动移动控制部92执行。在该情况下,不需要主操纵控制部94中的该变换的处理。
[0611]
[从动机械手控制部的控制处理]
[0612]
接着,参照图12来说明从动机械手控制部43的控制处理。从动机械手控制部43以规定的控制处理周期逐次执行图12的流程图所示的处理。在步骤30中,从动机械手控制部43从主操纵控制部94取得关于左右的从动手部21l、21r的目标从动手部运动(
↑
vsh_aim_l、
↑
ωsh_aim_l、
↑
vsh_aim_r、
↑
ωsh_aim_r),并且取得通过左右的从动手部力检测器22l、22r各自的输出而示出的从动手部力检测值、以及通过从动机械手10的各关节位移检测器28的输出而示出的从动关节位移检测值。需要说明的是,上述从动手部力检测值是在对各从动手部力检测器22设定的传感器坐标系中观察时的平移力及力矩的检测值。
[0613]
接下来,在步骤31中,从动机械手控制部43根据在步骤30取得的左右的从动手部力检测值,来求取左右的实际从动手部反作用力。具体而言,从动机械手控制部43使用在步骤30取得的从动关节位移检测值(从动机械手10的各关节的关节位移检测值),将各从动手部力检测器22的传感器坐标系中的从动手部力检测值变换为在所述从动上身坐标系cs中观察时的平移力及力矩的组,由此求取在从动上身坐标系cs中观察时的实际从动上身反作用力。
[0614]
需要说明的是,在步骤31求取的左右的实际从动手部反作用力各自的力矩是绕从动上身坐标系cs的原点(从动基准点qs)的力矩。
[0615]
以后,将在步骤31求取的、在从动上身坐标系cs中观察时的实际从动手部反作用力的平移力的参照附图标记关于左右的从动手部21l、21r分别记作
↑
f_sh_local_act_l、
↑
f_sh_local_act_r,并将力矩的参照附图标记关于左右的从动手部21l、21r分别记作
↑
m_sh_local_act_l、
↑
m_sh_local_act_r。
[0616]
接下来,在步骤32中,从动机械手控制部43使用在步骤30取得的关节位移检测值,来求取关于左右的从动手部21l、21r的实际从动手部运动。具体而言,从动机械手控制部43
通过运动学运算,关于左右的从动手部21l、21r,分别根据在步骤30取得的从动关节位移检测值来求取实际从动手部运动的位置及姿势角(在从动上身坐标系cs中观察时的位置及姿势角)。
[0617]
而且,从动机械手控制部43关于左右的从动手部21l、21r,分别通过求取所求出的位置及姿势角各自的时间上的变化率的微分处理,来求取实际从动手部运动的平移速度及角速度(在从动上身坐标系cs中观察时的平移速度及角速度)。由此,关于左右的从动手部21l、21r,分别求取在从动上身坐标系cs中观察时的从动手部运动。
[0618]
以后,将在步骤32求取的、在从动上身坐标系cs中观察时的实际从动手部运动的位置、平移速度、姿势角、角速度各自的参照附图标记关于左侧的从动手部21l分别记作
↑
p_sh_local_act_l、
↑
v_sh_local_act_l、
↑
θ_sh_local_act_l、
↑
ω_sh_local_act_l,关于右侧的从动手部21r分别记作
↑
p_sh_local_act_r、
↑
v_sh_local_act_r、
↑
θ_sh_local_act_r、
↑
ω_sh_local_act_r。
[0619]
接下来,在步骤33中,从动机械手控制部43控制从动关节致动器24(从动机械手10的各关节致动器24),以实现在步骤30取得的目标从动手部运动。
[0620]
具体而言,从动机械手控制部43将在步骤30取得的目标从动手部运动(
↑
vsh_aim_l、
↑
ωsh_aim_l、
↑
vsh_aim_r、
↑
ωsh_aim_r)变换为在从动上身坐标系cs中观察时的目标从动手部运动。该变换使用由从动移动控制部42求出的实际从动上身运动的位置
↑
p_sb_aim及姿势角
↑
θ_sb_act来进行。
[0621]
而且,从动机械手控制部43通过逆运动学的运算处理,根据上述变换后的目标从动手部运动来求取各从动关节(从动机械手10的各关节)的位移速度(旋转速度)的目标值即目标从动关节位移速度ωsh_joint_aim(i)。需要说明的是,目标从动关节位移速度的参照附图标记的尾标的括弧内的“i”是指从动机械手10的各关节的识别编号。
[0622]
另外,从动机械手控制部43按从动机械手10的各关节中的每个关节,通过求取在步骤30取得的关节位移检测值的时间上的变化率的微分处理,来求取作为各从动关节的实际的位移速度的观测值的实际从动关节位移速度ωsh_joint_act(i)。
[0623]
而且,从动机械手控制部43根据目标从动关节位移速度ωsh_joint_aim(i)与实际从动关节位移速度ωsh_joint_act(i)之间的偏差,并通过例如下式(70),对各从动关节决定各从动关节的目标驱动力(目标旋转驱动力)即目标从动关节驱动力tq_mh_joint_aim(i)。
[0624]
tq_sh_joint_aim(i)
[0625]
=kv_sh_joint*(ωsh_joint_aim(i)
‑
ωsh_joint_act(i))
[0626]
……
(70)
[0627]
需要说明的是,kv_sh_joint是规定值的增益。进行补充说明,式(70)是通过作为反馈控制律的一例的比例律来决定tq_sh_joint_aim(i)的式子,但也可以通过其他的反馈控制律(例如比例
·
微分律等)来决定tq_sh_joint_aim(i)。
[0628]
而且,从动机械手控制部43使与各从动关节对应的关节致动器24工作,以产生如上述那样决定的目标从动关节驱动力tq_sh_joint_aim(i)。由此,控制从动机械手10的各关节致动器24,以实现目标从动手部运动。步骤33的处理如以上那样执行。
[0629]
接下来,在步骤34中,从动机械手控制部43向主操纵控制部94输出(发送)在步骤
31中关于左右的从动手部21l、21r而分别求出的实际从动手部反作用力(
↑
f_sh_local_act_l、
↑
m_sh_local_act_l、
↑
f_sh_local_act_r、
↑
m_sh_local_act_r)、以及在步骤32中关于左右的从动手部21l、21r而分别求出的实际从动手部运动(
↑
p_sh_local_act_l、
↑
v_sh_local_act_l、
↑
θ_sh_local_act_l、
↑
ω_sh_local_act_l、
↑
p_sh_local_act_r、
↑
v_sh_local_act_r、
↑
θ_sh_local_act_r、
↑
ω_sh_local_act_r)。从动机械手控制部43的处理如以上那样执行。
[0630]
进行补充说明,在步骤34中向主操纵控制部94输出的实际从动手部反作用力(
↑
f_sh_local_act_l、
↑
m_sh_local_act_l、
↑
f_sh_local_act_r、
↑
m_sh_local_act_r)和实际从动手部运动(
↑
p_sh_local_act_l、
↑
v_sh_local_act_l、
↑
θ_sh_local_act_l、
↑
ω_sh_local_act_l、
↑
p_sh_local_act_r、
↑
v_sh_local_act_r、
↑
θ_sh_local_act_r、
↑
ω_sh_local_act_r)是在从动上身坐标系cs中观察时的实际从动手部反作用力及实际从动手部运动。
[0631]
因此,在主操纵控制部94中,使用从所述从动移动控制部42输入的实际从动上身运动的位置
↑
p_sb_act及姿势角
↑
θ_sb_act,将从从动机械手控制部43输入的实际从动上身反作用力及实际从动手部运动分别变换为在从动侧全球坐标系中观察时的实际从动手部反作用力(
↑
f_sh_act_l、
↑
m_sh_act_l、
↑
f_sh_act_r、
↑
m_sh_act_r)和实际从动手部运动(
↑
p_sh_act_l、
↑
v_sh_act_l、
↑
θ_sh_act_l、
↑
ω_sh_act_l、
↑
p_sh_act_r、
↑
v_sh_act_r、
↑
θ_sh_act_r、
↑
ω_sh_act_r)。而且,使用该变换后的实际从动手部反作用力及实际从动手部运动来执行所述的处理(图6的处理)。
[0632]
但是,将在从动上身坐标系cs中观察时的实际从动手部反作用力和实际从动手部运动变换为在从动侧全球坐标系中观察时的实际从动上身反作用力和实际从动手部运动这一处理,也可以由从动机械手控制部43执行。在该情况下,不需要主操纵控制部94中的该变换的处理。需要说明的是,在手部侧双边控制的运算中,优选使用在从动上身坐标系cs中观察时的实际从动手部反作用力和实际从动手部运动。在该情况下,关于主动装置51,也优选使用在主动上身坐标系cm中观察时的实际主动手部反作用力和实际主动手部运动。
[0633]
[主动机械手控制部的控制处理]
[0634]
接着,参照图13来说明主动机械手控制部93的控制处理。主动机械手控制部93以规定的控制处理周期逐次执行图13的流程图所示的处理。在步骤40中,主动机械手控制部93从主操纵控制部94取得关于左右的主动手部81l、81r的目标主动手部运动(
↑
vmh_aim_l、
↑
ωmh_aim_l、
↑
vmh_aim_r、
↑
ωmh_aim_r),并且取得通过左右的主动手部力检测器82l、82r各自的输出而示出的主动手部力检测值、以及通过主动机械手70的各关节位移检测器85的输出而示出的主动关节位移检测值。需要说明的是,上述主动手部力检测值是在对各主动手部力检测器82设定的传感器坐标系中观察时的平移力及力矩的检测值。
[0635]
接下来,在步骤41中,主动机械手控制部93根据在步骤40取得的左右的主动手部力检测值,来求取左右的实际主动手部反作用力。具体而言,主动机械手控制部93使用在步骤40取得的主动关节位移检测值(从动机械手10的各关节的关节位移检测值),将各主动手部力检测器82的传感器坐标系中的主动手部力检测值变换为在所述主动上身坐标系cm中观察时的平移力及力矩的组,由此求取在主动上身坐标系cm中观察时的实际从动上身反作用力。
[0636]
需要说明的是,在步骤41求取的左右的实际主动手部反作用力各自的力矩是绕主动上身坐标系cm的原点(主动基准点qm)的力矩。
[0637]
以后,将在步骤41求取的、在主动上身坐标系cm中观察时的实际主动手部反作用力的平移力的参照附图标记关于左右的主动手部81l、81r分别记作
↑
f_mh_local_act_l、
↑
f_mh_local_act_r,并将力矩的参照附图标记关于左右的主动手部81l、81r分别记作
↑
m_mh_local_act_l、
↑
m_mh_local_act_r。
[0638]
接下来,在步骤42中,主动机械手控制部93使用在步骤40取得的关节位移检测值,来求取关于左右的主动手部81l、81r的实际主动手部运动。具体而言,主动机械手控制部93通过运动学运算,关于左右的主动手部81l、81r分别根据在步骤40取得的主动关节位移检测值来求取实际主动手部运动的位置及姿势角(在主动上身坐标系cm中观察时的位置及姿势角)。而且,主动机械手控制部93关于左右的主动手部81l、81r,分别通过求取所求出的位置及姿势角各自的时间上的变化率的微分处理,来求取实际主动手部运动的平移速度及角速度(在主动上身坐标系cm中观察时的平移速度及角速度)。由此,关于左右的主动手部81l、81r分别求取在主动上身坐标系cm中观察时的主动手部运动。
[0639]
以后,将在步骤42求取的、在主动上身坐标系cm中观察时的实际主动手部运动的位置、平移速度、姿势角、角速度各自的参照附图标记关于左侧的主动手部81l分别记作
↑
p_mh_local_act_l、
↑
v_mh_local_act_l、
↑
θ_mh_local_act_l、
↑
ω_mh_local_act_l,关于右侧的主动手部81r分别记作
↑
p_mh_local_act_r、
↑
v_mh_local_act_r、
↑
θ_mh_local_act_r、
↑
ω_mh_local_act_r。
[0640]
接下来,在步骤43中,主动机械手控制部93控制主动关节致动器84(主动机械手70的各关节致动器84),以实现在步骤40中取得的目标从动手部运动。
[0641]
具体而言,主动机械手控制部93将在步骤40取得的目标主动手部运动(
↑
vmh_aim_l、
↑
ωmh_aim_l、
↑
vmh_aim_r、
↑
ωmh_aim_r)变换为在主动上身坐标系cm中观察时的目标主动手部运动。该变换使用在主动移动控制部92中求出的实际上身支承部运动的位置
↑
p_mb_aim及姿势角
↑
θ_mb_act来进行。
[0642]
而且,主动机械手控制部93通过逆运动学的运算处理,根据上述变换后的目标主动手部运动来求取各主动关节(主动机械手70的各关节)的位移速度(旋转速度)的目标值即目标主动关节位移速度ωmh_joint_aim(j)。需要说明的是,目标主动关节位移速度的尾标的括弧内的“j”是指主动机械手70的各关节的识别编号。
[0643]
另外,主动机械手控制部93按主动机械手70的各关节的每个关节,通过求取在步骤40中取得的关节位移检测值的时间上的变化率的微分处理,来求取作为各主动关节的实际的位移速度的观测值的实际主动关节位移速度ωmh_joint_act(j)。
[0644]
而且,主动机械手控制部93按各主动关节的每个主动关节,通过下式(71)并根据目标主动关节位移速度ωmh_joint_aim(j)与实际主动关节位移速度ωmh_joint_act(j)之间的偏差来决定各主动关节的目标驱动力(目标旋转驱动力)即目标主动关节驱动力tq_mh_joint_aim(i)。
[0645]
tq_mh_joint_aim(i)
[0646]
=kv_mh_joint*(ωmh_joint_aim(i)
‑
ωmh_joint_act(i))
[0647]
……
(71)
[0648]
需要说明的是,kv_mh_joint是规定值的增益。进行补充说明,式(71)是通过作为反馈控制律的一例的比例律来决定tq_mh_joint_aim(i)的式子,但也可以通过其他的反馈控制律(例如比例
·
微分律等)来决定tq_mh_joint_aim(i)。
[0649]
而且,主动机械手控制部93使与各主动关节对应的关节致动器84工作,以产生如上述那样决定的目标主动关节驱动力tq_mh_joint_aim(i)。由此,控制主动机械手70的各关节致动器84,以实现目标主动手部运动。步骤43的处理如以上那样执行。
[0650]
接下来,在步骤44中,主动机械手控制部93向主操纵控制部94输出(发送)在步骤41中关于左右的主动手部81l、81r分别求出的实际主动手部反作用力(
↑
f_mh_local_act_l、
↑
m_mh_local_act_l、
↑
f_mh_local_act_r、
↑
m_mh_local_act_r)和在步骤32中关于左右的从动手部21l、21r分别求出的实际从动手部运动(
↑
p_mh_local_act_l、
↑
v_mh_local_act_l、
↑
θ_mh_local_act_l、
↑
ω_mh_local_act_l、
↑
p_mh_local_act_r、
↑
v_mh_local_act_r、
↑
θ_mh_local_act_r、
↑
ω_mh_local_act_r)。主动机械手控制部93的处理如以上那样执行。
[0651]
进行补充说明,在步骤44向主操纵控制部94输出的实际从动手部反作用力(
↑
f_mh_local_act_l、
↑
m_mh_local_act_l、
↑
f_mh_local_act_r,
↑
m_mh_local_act_r)和实际从动手部运动(
↑
p_mh_local_act_l、
↑
v_mh_local_act_l、
↑
θ_mh_local_act_l、
↑
ω_mh_local_act_l、
↑
p_mh_local_act_r、
↑
v_mh_local_act_r、
↑
θ_mh_local_act_r、
↑
ω_mh_local_act_r)是在主动上身坐标系cm中观察时的实际主动手部反作用力及实际主动手部运动。
[0652]
因此,在主操纵控制部94中,使用从所述主动移动控制部92输入的实际上身支承部运动的位置
↑
p_mb_act及姿势角
↑
θ_mb_act,将从主动机械手控制部93输入的实际上身支承部反作用力及实际上身支承部运动分别变换为在主动侧全球坐标系中观察时的实际主动手部反作用力(
↑
f_mh_act_l、
↑
m_mh_act_l、
↑
f_mh_act_r、
↑
m_mh_act_r)和实际主动手部运动(
↑
p_mh_act_l、
↑
v_mh_act_l、
↑
θ_mh_act_l、
↑
ω_mh_act_l、
↑
p_mh_act_r、
↑
v_mh_act_r、
↑
θ_mh_act_r、
↑
ω_mh_act_r)。而且,使用该变换后的实际主动手部反作用力及实际主动手部运动来执行所述的处理(图6的处理)。
[0653]
但是,将在主动上身坐标系cm中观察时的实际主动手部反作用力和实际主动手部运动变换为在主动侧全球坐标系中观察时的实际主动上身反作用力和实际主动手部运动这一处理,也可以由主动机械手控制部93执行。在该情况下,不需要主操纵控制部94中的该变换的处理。
[0654]
[关于作用效果]
[0655]
根据以上说明的本实施方式,主动装置51构成为通过将其上身支承部65佩戴于上身的腰部的操纵者p在地板面上移动(步行),从而能够与该操纵者p一起在地板面上移动。因此,不需要在操纵者p的各腿佩戴的机构,能够实现简易小型的结构的主动装置51。另外,通过操纵者p移动(步行),从而从动装置1移动,因此操纵者p容易识别自身的移动动作与从动装置1的移动动作之间的对应关系。因此,操纵者p不需要高度熟练,能够容易地进行从动装置1的移动操纵。
[0656]
另外,主动装置51的目标上身支承部运动和目标从动上身运动决定为使由所述式(1a)、(1b)定义的上身反作用力偏差(上身反作用力平移力偏差
↑
efb及上身反作用力力矩
偏差
↑
emb)和由所述式(2a)、(2b)定义的上身位置姿势偏差(上身位置偏差
↑
epb及上身姿势偏差
↑
ethb)收敛为零。
[0657]
因此,例如,在从动上身上未作用因与外界的物体之间的接触等而引起的实际从动上身反作用力、且在主动机械手70上未从操纵者p作用实际主动手部反作用力的状态(换言之,式(1a)、(1b)的
↑
f_sb_act、
↑
f_mh_act、
↑
m_sb_act、
↑
m_mh_act均为零或大致为零的状态)下,决定目标状态支承部运动,以使实际上身支承部反作用力(
↑
f_mb_act、
↑
m_mb_act)能够收敛为零。而且,控制主动移动机构52的电动马达55a、55b和主动升降机构60的滑动驱动致动器66,以实现该目标支承部运动。
[0658]
进而,操纵者p能够在不从佩戴于其腰部的上身支承部65接受或者几乎不受反作用力(其能够包括横向及上下方向上的平移力)的状态下在地板面上移动。因此,操纵者p能够在未佩戴上身支承部65这样的感觉下一边进行移动动作一边进行从动装置1的移动操纵。
[0659]
另外,例如,在从动上身上作用实际从动上身反作用力、且另一方面在主动机械手70上未作用实际主动手部反作用力的状态(换言之,式(1a)、(1b)的
↑
f_mh_act、
↑
m_mh_act均为零或者大致为零的状态)下,决定目标状态支承部运动,以使实际上身支承部反作用力(
↑
f_mb_act、
↑
m_mb_act)收敛为与实际从动上身反作用力(
↑
f_sb_act、
↑
m_sb_act)成比例的值(详细而言,成为
↑
f_mb_act=
‑
ratio_fsb*
↑
f_sb_act、
↑
m_mb_act=
‑
ratio_msb*
↑
m_sb_act)。而且,控制主动移动机构52的电动马达55a、55b和主动升降机构60的滑动驱动致动器66,以实现该目标支承部运动。
[0660]
因此,在从动上身上作用了因与外界的物体之间的接触等而引起的实际从动上身反作用力的情况下,经由上身支承部65而在操纵者p的上身支承部65的佩戴部位(腰部)上作用与实际从动上身反作用力成比例的反作用力(其能够包括横向及上下方向上的平移力)。由此,操纵者p能够在体感上识别在从动上身上作用了实际从动上身反作用力这一情况。另外,在该情况下,操纵者p能够在躯干上识别实际从动上身反作用力的大小的程度、方向。因此,操纵者p能够恰当地采取使从动装置1的移动停止等应对处理。
[0661]
另外,例如,在从动上身上不作用实际从动上身反作用力的状态、在主动机械手70上作用着实际主动手部反作用力的状态(换言之,式(1a)、(1b)的
↑
f_sb_act、
↑
m_sb_act均为零或大致为零的状态)下,决定目标状态支承部运动,以使实际上身支承部反作用力(
↑
f_mb_act、
↑
m_mb_act)收敛为与实际主动手部合力(
↑
f_mh_act、
↑
m_mh_act)成比例的值(详细而言,成为
↑
f_mb_act=
‑
ratio_fmh*
↑
f_mh_act、
↑
m_mb_act=
‑
ratio_mmh*
↑
m_mh_act)。而且,控制主动移动机构52的电动马达55a、55b和主动升降机构60的滑动驱动致动器66,以实现该目标支承部运动。
[0662]
在该情况下,例如,在系数ratio_fmh、ratio_mmh的值设定为ratio_fmh=ratio_mmh=1的情况下,从上身支承部65向操纵者p的上身(腰部)作用抵消主动手部反作用力的反作用力,因此在操纵者p的腿上不作用与主动手部反作用力相应的反作用力(其能够包括横向及上下方向上的平移力)。因此,即使由于从动手部反作用力大等而引起主动手部反作用力大,操纵者p也不会在腿上感到由主动手部反作用力引起的负荷,而能够容易地移动主动机械手70,以移动各从动手部21。
[0663]
另外,在系数ratio_fmh、ratio_mmh的值设定为比“1”小的值的情况下,在操纵者p
的腿上作用与主动手部反作用力成比例的反作用力(其能够包括横向及上下方向上的平移力)。因此,操纵者p能够在腿上识别各从动手部21从作业对象的物体等接受的反作用力的大小、其方向。进而,在各从动手部21从作业对象的物体等接受的反作用力的大小过大、或者该反作用力的方向成为异常的方向的情况等下,能够恰当地采取中止从动机械手10的操纵等应对处理。
[0664]
而且,在从动上身上作用实际从动上身反作用力、并且在主动机械手70上作用有实际主动手部反作用力的状态下,能够一并起到在主动机械手70上未作用实际主动手部反作用力的状态下的上述的作用效果、以及在从动上身上未作用实际从动上身反作用力的状态下的上述的作用效果。
[0665]
另外,在本实施方式中,主动装置51的上身支承部65经由支轴63支承于滑动构件62,以能够绕前后方向(主动上身坐标系cm的x轴方向)的轴心自由旋转,因此操纵者p能够无阻力感地进行使腰部向侧倾方向摆动。因此,操纵者p能够顺利地进行作为移动动作的步行动作。
[0666]
[第二实施方式]
[0667]
接着,说明本发明的第二实施方式。需要说明的是,在本实施方式中,从动装置1及主动装置51的结构与第一实施方式相同。在本实施方式中,主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中,代替通过所述式(1a)、(1b)来设定上身反作用力偏差,例如通过使式(1a)、(1b)中的系数ratio_fsb、ratio_msb、ratio_fmh、ratio_mmh均与零一致的式子、即下式(81a)、(81b)来设定(定义)上身反作用力偏差。
[0668]
↑
efb=
↑
f_mb_act
……
(81a)
[0669]
↑
emb=
↑
m_mb_act
……
(81b)
[0670]
在该情况下,在本实施方式中,主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中,通过将所述第一实施方式中的系数ratio_fsb、ratio_msb、ratio_fmh、ratio_mmh均设定为零的处理,来决定目标上身支承部运动和目标从动上身运动。另外,主操纵控制部94省略在步骤1取得实际从动上身反作用力这一处理。另外,在从动移动控制部42的处理中,省略求取实际从动上身反作用力的处理。其他可以与所述第一实施方式相同。
[0671]
根据所涉及的本实施方式,能够起到与在第一实施方式中关于在从动上身上未作用实际从动上身反作用力、且在主动机械手70上未从操纵者p作用实际主动手部反作用力的状态而说明的效果同样的效果。
[0672]
[第三实施方式]
[0673]
接着,说明本发明的第三实施方式。需要说明的是,在本实施方式中,从动装置1及主动装置51的结构与第一实施方式相同。在本实施方式中,主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中,代替通过所述式(1a)、(1b)来设定上身反作用力偏差,例如通过使式(1a)、(1b)中的系数ratio_fmh、ratio_mmh均与零一致的式子、即通过下式(82a)、(82b)来设定(定义)上身反作用力偏差。
[0674]
↑
efb=
↑
f_mb_act ratio_fsb*
↑
f_sb_act
[0675]
……
(82a)
[0676]
↑
emb=
↑
m_mb_act ratio_msb*
↑
m_sb_act
[0677]
……
(82b)
[0678]
在该情况下,在本实施方式中,主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中,通过将所述第一实施方式中的系数ratio_fmh、ratio_mmh均设定为零的处理,来决定目标上身支承部运动和目标从动上身运动。其他可以与所述第一实施方式相同。
[0679]
根据所涉及的本实施方式,能够起到与在第一实施方式中关于在主动机械手70上未从操纵者p作用实际主动手部反作用力的状态说明的效果同样的效果。
[0680]
[第四实施方式]
[0681]
接着,说明本发明的第四实施方式。需要说明的是,在本实施方式中,从动装置1及主动装置51的结构与第一实施方式相同。在本实施方式中,主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中,代替通过所述式(1a)、(1b)来设定上身反作用力偏差,例如通过使式(1a)、(1b)中的系数ratio_fsb、ratio_msb均与零一致的式子、即下式(83a)、(83b)来设定(定义)上身反作用力偏差。
[0682]
↑
efb=
↑
f_mb_act ratio_fmh*
↑
f_mh_act
[0683]
……
(83a)
[0684]
↑
emb=
↑
m_mb_act ratio_mmh*
↑
m_mh_act
[0685]
……
(83b)
[0686]
在该情况下,在本实施方式中,主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中,通过使所述第一实施方式中的系数ratio_fsb、ratio_msb均设定为零的处理,来决定目标上身支承部运动和目标从动上身运动。另外,主操纵控制部94省略在步骤1取得实际从动上身反作用力这一处理。另外,在从动移动控制部42的处理中,省略求取实际从动上身反作用力的处理。其他可以与所述第一实施方式相同。
[0687]
根据所涉及的本实施方式,能够起到与在第一实施方式中关于在从动上身上未作用实际从动上身反作用力的状态说明的效果同样的效果。
[0688]
[第五实施方式]
[0689]
接着,说明本发明的第五实施方式。需要说明的是,在本实施方式中,从动装置1及主动装置51的结构与第一实施方式相同。在本实施方式中,主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中,关于上身反作用力平移力偏差
↑
efb中的除了上下方向(z轴方向)以外的分量,通过与第一实施方式的所述式(1a)(或第三实施方式的所述式(82a)或第四实施方式的所述式(83a))相同形式的式子来设定,关于上下方向(z轴方向)的分量efb_z,例如通过下式(84a)来设定。
[0690]
需要说明的是,f_mb_z_act是实际上身支承部反作用力的平移力
↑
f_mb_act中的上下方向(z轴方向)上的平移力。cz是为了恒定地减轻操纵者p的腿上的负荷而从上身支承部65向操纵者p作用的上下方向上的平移力的目标值(规定值)。需要说明的是,cz可以是零。
[0691]
efb_z=f_mb_z_act cz
……
(84a)
[0692]
在该情况下,在本实施方式中,主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中求取目标上身支承部平移加速度
↑
acc_mb_aim及目标从动上身平移加速度
↑
acc_sb_aim各自的上下方向(z轴方向)的分量的情况下,通过将所述第一实施方式中的系数ratio_fsb、ratio_msb均设定为零的处理来求取该上下方向上的分量。其他与第一实施方式(或第三实施方式或第四实施方式)相同。
[0693]
根据所涉及的本实施方式,关于实际上身支承部反作用力中的横向的平移力,能够起到与所述第一实施方式(或第三实施方式或第四实施方式)同样的效果。
[0694]
另外,关于实际上身支承部反作用力中的上下方向上的平移力,将cz设定为例如cz=0(或cz≈0)的情况下,控制主动升降机构60的滑动驱动致动器66,以使该上下方向上的平移力为零(或者大致为零)。因此,操纵者能够没有阻力感地进行伴随其步行动作的上身的上下移动。进而,能够顺利地进行用于移动体的移动操纵的移动。另外,在将cz设定为正的规定值、例如作用于操纵者p的重力中的一定比例的值的情况下,操纵者p能够在恒定地减轻相对于重力产生的自身的腿的负荷的状态下移动。进而,能够顺利地进行用于移动体的移动操纵的移动。
[0695]
进行补充说明,也可以是,在所述第一实施方式、第三实施方式及第四实施方式各个实施方式中,关于上身反作用力平移力偏差
↑
efb中的上下方向(z轴方向)的分量efb_z,代替通过所述式(1a)、(82a)、(83c)来决定efb_z,例如通过在式(1a)、(82a)、(83c)中的与efb_z对应的式的右边与上述式(84a)的右边同样地附加“ cz”(cz>0)而得到的式子,来设定(定义)efb_z。
[0696]
即,也可以是,在第一实施方式、第三实施方式及第四实施方式各个实施方式中,通过下式(1a)’、(82a)’、(83c)’中的任意方,来设定(定义)上身反作用力平移力偏差
↑
efb中的上下方向(z轴方向)的分量efb_z。需要说明的是,f_sb_z_act、f_mh_z_act分别是
↑
f_sb_act、
↑
f_mh_act的上下方向(z轴方向)的分量。
[0697]
efb_z=f_mb_z_act ratio_fsb*f_sb_z_act
[0698]
ratio_fmh*f_mh_z_act cz
[0699]
……
(1a)’[0700]
efb_z=f_mb_z_act ratio_fsb*f_sb_z_act cz
[0701]
……
(82a)’[0702]
efb_z=f_mb_z_act ratio_fmh*f_mh_z_act cz
[0703]
……
(83a)’[0704]
在这样的情况下,也与上述的第五实施方式同样,操纵者p能够在恒定地减轻相对于重力产生的自身的腿的负荷的状态移动。
[0705]
[第六实施方式]
[0706]
接着,说明本发明的第六实施方式。在本实施方式中,使从动装置1及主动装置51的一部分的结构与第一实施方式不同。例如,在本实施方式中,省略主动装置51的升降机构60的滑动驱动致动器66,构成升降机构60,以成为滑动构件62相对于支柱61在规定的范围内在上下方向上移动自如的状态(能够自由移动)。
[0707]
另外,在从动装置1中,例如基于从动滑动位移检测器29及主动滑动位移检测器89各自的检测值来对从动滑动驱动致动器36进行位移控制,以使从动滑动构件32的上下方向上的位移追随主动滑动构件62的上下方向上的位移。或者也可以是,在从动装置1中,省略升降机构30,并将从动机械手10安装于支柱31。
[0708]
而且,省略主操纵控制部94在上身侧双边控制的处理(步骤3的处理)中决定目标上身支承部运动及目标从动上身运动中的上下方向上的平移速度这一处理。另外,省略从动移动控制部42在所述步骤12中求取实际从动上身运动中的上下方向(z轴方向)上的平移
速度的处理。
[0709]
而且,从动移动控制部42在步骤14中控制从动滑动驱动致动器36,以如上述那样从动滑动构件32的上下方向上的位移追随主动滑动构件62的上下方向上的位移。需要说明的是,在省略了从动升降机构30的情况下,省略步骤14的处理。其他可以与所述第一实施方式~第四实施方式中的任意实施方式相同。
[0710]
根据所涉及的本实施方式,主动装置51的上身支承部65能够在上下方向上自由移动,因此不需要致动器,就能够使上身支承部65追随操纵者p的上身的上下移动而上下移动。因此,操纵者p能够顺利地进行步行动作等。
[0711]
[第七实施方式]
[0712]
接着,参照图14来说明本发明的第七实施方式。在本实施方式中,如图14所示,在本实施方式中,主动装置51的升降机构60’代替滑动驱动致动器66而具备螺旋弹簧等弹簧68,该弹簧68以压缩状态夹装于在支柱61固定的台座构件67与滑动构件62之间。由此,上身支承部65通过弹簧68的弹性力而向上方施力,并且能够弹性地上下移动。在该情况下,弹簧68的弹性力可以是能够抑制上身支承部65及滑动构件62的下降的程度的弹性力。其他可以与所述第六实施方式相同。
[0713]
根据所涉及的本实施方式,能够减轻或消除在佩戴了上身支承部65的操纵者p的上身上作用上身支承部65、支轴63、上身力检测器64及滑动构件62的重量。或者,能够从上身支承部65向操纵者p作用减轻操纵者p的腿相对于作用于该操纵者p的重力的负担的辅助力(朝上的平移力)。需要说明的是,也可以代替在主动装置51上如上述那样具备弹簧68,通过在第一实施方式说明的升降机构60的滑动驱动致动器66,根据滑动构件62的上下方向上的位移(换言之,上身支承部65的上下方向上的位移),产生与弹簧68的弹性力同样的驱动力。
[0714]
[第八实施方式]
[0715]
接着,参照图15来说明本发明的第八实施方式。根据所述第一实施方式,主动装置51的上身支承部65经由支轴63安装于滑动构件62,以成为在侧倾方向(绕前后方向的轴的方向)旋转自如的状态(能够在侧倾方向上自由旋转)。与此相对,在本实施方式中,如图15所示,上身支承部65安装于滑动构件62,以成为不仅在侧倾方向上而且在俯仰方向(绕左右方向的轴的方向)上旋转自如的状态(能够在侧倾方向及俯仰方向上自由旋转)。
[0716]
更具体而言,在本实施方式中,上身支承部65’具备:半圆弧形状(或u字形状)的外侧构件65a,其经由支轴63安装于滑动构件62,以能够在侧倾方向上自由旋转;以及半圆弧形状(或u字形状)的内侧构件65b,其配置于所述外侧构件65a的内侧,内侧构件65b的两端部分别经由具有左右方向的轴心的支轴65c而轴支于外侧构件65a的各端部。
[0717]
由此,内侧构件65b能够相对于外侧构件65a绕支轴65c的轴心在俯仰方向上自由旋转。换言之,内侧构件65b通过与所谓的万向接头机构同样的机构安装为能够相对于滑动构件62在侧倾方向及俯仰方向上自由旋转。而且,在所涉及的结构的上身支承部65’中,内侧构件65b相当于第一实施方式中的上身支承部65,从操纵者p的上身(例如腰部)的背面侧沿着操纵者p的上身(例如腰部)佩戴于操纵者p的上身(例如腰部)。其他的事项可以与所述第一实施方式~第七实施方式中的任意实施方式相同。
[0718]
根据所涉及的本实施方式,上身支承部65’相对于操纵者p的上身(腰部)的佩戴部
即内侧构件65b以能够在侧倾方向及俯仰方向上自由旋转的方式支承于滑动构件62,因此操纵者p能够无阻力感地进行使腰部在侧倾方向及俯仰方向上摆动。因此,操纵者p能够更顺利地进行作为移动动作的步行动作。需要说明的是,在第八实施方式中,也可以省略支轴63,以将上身支承部65’在侧倾方向上固定。
[0719]
[其他的实施方式]
[0720]
本发明并不限定于以上说明的实施方式,也能够进一步采用其他的实施方式。例如在所述各实施方式中,作为本发明的上身支承部驱动机构,例示了具备能够与操纵者p一起在地板面上移动的主动移动机构52和主动升降机构60的机构。但是,本发明的上身支承部驱动机构例如也可以是图16所例示的结构。
[0721]
在该例子中,主动装置51’(操纵装置)具备与第一实施方式同样的结构的升降机构60、上身支承部65及机械手70,并且具备在操纵者p(省略图示)移动的环境的建筑物的顶棚部(省略图示)设置的移动机构100,在该移动机构100支承有升降机构60的支柱61(换言之,上身支承部65经由升降机构60安装于移动机构100)。
[0722]
在该情况下,移动机构100具备:一对第一可动部102、102,它们能够沿着固定于顶棚的一对平行的导轨机构101、101通过未图示的致动器的驱动力而在前后方向(图示的主动上身坐标系cm的x轴方向)上移动;导轨机构103,其架设于第一可动部102、102之间,以能够与这些第一可动部102、102一体移动;第二可动部104,其能够沿着导轨机构103通过未图示的致动器的驱动力而在左右方向(主动上身坐标系cm的y轴方向)上移动;上侧板状构件105,其从该第二可动部104向前方延伸设置;以及下侧板状构件107,其配置于该上侧板状构件105的下侧,并经由致动器106安装于板状构件105,以能够通过该致动器106(例如电动马达)相对于该上侧板状构件105绕上下方向的轴心(绕主动上身坐标系cm的z轴的方向)而旋转。
[0723]
而且,上身支承部65的中心附近位于致动器106的旋转轴心的大致正下方,升降机构60的支柱61的上端部固定于下侧板状构件107。需要说明的是,在本实施方式中,由上述移动机构100和升降机构60来实现本发明的上身支承部驱动机构。另外,上身支承部也可以是所述第八实施方式说明的上身支承部65’。
[0724]
在所涉及的主动装置51’中,升降机构60的支柱61通过移动机构100的动作而能够沿横向(与上下方向正交的方向)移动,并且能够绕致动器106的轴心(偏转(yaw)方向)旋转。因此,操纵者p与第一实施方式同样地能够在地板面上移动。而且,通过移动机构100的未图示的致动器和致动器106的工作控制,与第一实施方式(或第二实施方式~第八实施方式中的任意方)同样地能够控制上身支承部反作用力。
[0725]
另外,在所述各实施方式中,例示了在主动装置51、51’中具备从动机械手10的操纵用的主动机械手70的情况。但是,也可以是,通过例如操纵者p所持的遥控器、智能手机等便携终端而能够进行从动机械手10的操纵。在该情况下,不需要主动机械手70及其控制处理。
[0726]
另外,本发明的上身支承部驱动机构例如也能够采用图17所例示的结构。在该例子中,主动装置51”(操纵装置)具备与所述第一实施方式相同的结构的上身支承部65、以及在将该上身支承部65佩戴于上身(腰部)的操纵者p的移动环境的周围配置的多个电动马达110。各电动马达110例如安装于在地板面上立起设置的支柱111上。
[0727]
而且,在各电动马达110的旋转轴上装配有能够通过该电动马达110而旋转驱动的滑轮112。而且,卷绕于与各电动马达110对应的滑轮112的线材113从该滑轮112引出,该引出的线材113的前端部连结于上身支承部65。
[0728]
在所涉及的主动装置51”中,由多个电动马达110和线材113来实现本发明的上身支承部驱动。而且,在该主动装置51”中,通过各电动马达110的工作控制,操纵者p能够在地板面上移动,并且能够与第一实施方式(或第二实施方式~第八实施方式中的任意实施方式)同样地控制其移动时的上身支承部反作用力。需要说明的是,也可以代替电动马达110而使用液压马达等致动器。另外,上身支承部也可以是在所述第八实施方式中说明的上身支承部65’。
[0729]
另外,在所述第一实施方式~第八实施方式中,主动装置51(操纵装置)的移动机构52具备所述的移动接地部54,但本发明的操纵装置中的上身支承部驱动机构的移动机构也可以是其他的构造的移动机构、例如腿式的移动机构。
[0730]
另外,也可以是,本发明中的移动体的移动机构也是与所述的从动移动机构2不同的构造,例如移动体能够自主稳定地移动即可,该移动体的移动机构也可以是腿式的移动机构。而且,本发明中的移动体也可以是假想的(虚拟的)移动体。
[0731]
另外,在所述第一实施方式~第八实施方式中,例示了不进行主动装置51(操纵装置)的上身支承部65(或65’)和从动装置1的从动上身的侧倾方向及俯仰方向的姿势的控制的情况,但也能够进行上身支承部65(或65’)及从动上身的侧倾方向及俯仰方向的姿势的控制。
[0732]
另外,检测获知与主动装置51(操纵装置)及从动装置1(移动体)各自的移动相关的运动状态(实际上身支承部运动及实际从动上身运动)的方法不限定于在所述第一实施方式说明的方法。例如,也可以在主动装置51(操纵装置)及从动装置1(移动体1)分别搭载惯性传感器,并使用该惯性传感器来检测获知实际上身支承部运动及实际从动上身运动。或者,例如也可以使用动作捕捉的技术根据主动装置51及从动装置1各自的拍摄影像来检测获知实际上身支承部运动及实际从动上身运动。
[0733]
另外,在所述第一实施方式~第八实施方式中,为了决定作为本发明中的移动体的移动控制用指令值的所述目标从动上身运动,通过所述式(21a)(或通过使式(21a)的系数ratio_fsb为零的式子)而决定了目标从动上身平移加速度
↑
acc_sb_aim。在该情况下,式(21a)的右边的
↑
va_dotdot_aim由所述式(17a)决定,因此是上身位置偏差
↑
epb及其时间上的变化率
↑
epb_dot的函数。另外,
↑
epb由所述式(2a)设定,因此
↑
epb及
↑
epb_dot分别是上身支承部65的位置
↑
p_mb_act、速度
↑
v_mb_act的函数。
[0734]
因此,在所述第一实施方式~第八实施方式中,所述目标从动上身运动中的目标从动上身平移加速度
↑
acc_sb_aim决定为上身支承部65的位置
↑
p_mb_act(移动位置)及速度
↑
v_mb_act(移动速度)的观测值的函数。但是,例如通过将式(17a)中的系数kpbv设定为零,能够将目标从动上身平移加速度
↑
acc_sb_aim决定为上身支承部65的位置
↑
p_mb_act的观测值的函数,或者将式(17a)中的系数kpbp设定为零,从而也能够将目标从动上身平移加速度
↑
acc_sb_aim决定为上身支承部65的速度
↑
v_mb_act的观测值的函数。
[0735]
另外,在所述第一实施方式~第八实施方式中,为了控制所述上身支承部反作用力,使用了由主动上身力检测器64检测的上身支承部力检测值,但是例如也能够检测操纵
者p的佩戴部(腰部)相对于上身支承部65(或上身支承部65’的内侧构件65b)的相对位移,并根据该检测值来控制上身支承部反作用力。
[0736]
例如,在上身支承部65(或上身支承部65’的内侧构件65b)的内侧,事先在操纵者p的腰部卷缠带状的反射板,并且事先将检测该反射板与上身支承部65(或上身支承部65’的内侧构件65b)之间的距离的距离传感器(间隙传感器)设置于上身支承部65(或内侧构件65b)的周向的多个部位。
[0737]
在该情况下,由各距离传感器检测的距离相当于操纵者p的佩戴部(腰部)相对于上身支承部65(或内侧构件65b)的相对位移的观测值。而且,该距离与由上身支承部65(或内侧构件65b)和操纵者p的佩戴部(腰部)之间的衬垫等弹性构件产生的弹性力成比例。
[0738]
因此,操纵者p的佩戴部(腰部)相对于上身支承部65(或内侧构件65b)的相对位移的观测值(上述距离的检测值)与上身支承部65(或内侧构件65b)从操纵者p接受的实际的上身支承部反作用力对应。因此,代替上身支承部反作用力的观测值,使用操纵者p的佩戴部(腰部)相对于上身支承部65(或内侧构件65b)的相对位移的观测值,也与所述第一实施方式~第八实施方式同样地能够控制上身支承部反作用力。
[0739]
另外,本发明的操纵装置也能够不具备上身支承部驱动机构。例如,也可以在所述第一实施方式的主动装置51的主动基台53上代替所述移动接地部54而安装能够在地板面上在任意的方向上自由移动的多个万向轮脚轮,从而主动基台53经由该万向轮脚轮而能够在地板面上自由移动。
[0740]
另外,在所述第一实施方式~第八实施方式中,将主操纵控制部94设置于主控制装置91,但是可以设置于从动控制装置41。或者,也可以是,在主控制装置91和从动控制装置41这双方设置能够执行相同的处理的主操纵控制部94,能够由主控制装置91和从动控制装置41分别各自决定主动上身支承部运动和从动上身支承部运动。在这样的情况下,能够补偿主控制装置91与从动控制装置41之间的通信时间的影响。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。