1.本发明涉及焊接领域,具体涉及一种异形回转体的处理方法及生产装置。
背景技术:
2.对于回转体之间的刚性焊接,特别是异形回转体之间的刚性焊接而言,激光焊接作为一种高效清洁的连接法而得到广泛的应用。激光焊接可有不同的焊接方式,例如轮廓焊接、同步焊接、准同步焊接等。图1a及图1b为典型的回转体的轮廓焊接的示意图,其中待焊接的回转体1的焊接轮廓10为圆形,激光镜头2用于将激光束施加至回转体1的焊接轮廓10上以进行焊接。对于回转体1而言,由于其焊接轮廓10为圆形,通过回转体1的匀速旋转就可以得到均匀的焊缝。
3.但是,对于图2a所示的异形回转体1’而言,由于其焊接轮廓10’为非圆形,通过异形回转体1’的匀速转动则难以获得均匀的焊缝。这是因为,激光镜头2在焊接过程中始终保持静止,当异形回转体1’绕所述焊接轮廓10’的回转中心做匀速转动时,所述焊接轮廓10’上各点的线速度不相等,且当所述焊接轮廓10’上的点在转动至激光镜头2的工作区时,各点到激光镜头2的距离以及激光束的入射角度也不相等(如图2b所示),由此导致焊接不均匀。此外,对于异形回转体的旋转表面喷涂操作亦存在相同的问题。
技术实现要素:
4.本发明的目的在于提供一种异形回转体的处理方法及装置,其可以有效提高操作轮廓为非圆形的异形回转体的焊接或喷涂均匀性。
5.为实现上述目的,本发明提供的一种异形回转体的处理方法,用于利用一生产装置对异形回转体进行焊接或喷涂处理,且所述生产装置具有施加机构,所述异形回转体具有一操作轮廓,所述操作轮廓具有一回转中心,所述施加机构用于将目标物施加于所述操作轮廓上,所述处理方法包括:
6.步骤s1:规划一运动方案;
7.步骤s2:执行焊接或喷涂处理,包括:
8.驱使所述异形回转体和所述施加机构按照所述运动方案运动,使得所述操作轮廓上的任意一点经过所述施加机构的工作区而成为目标位点时,所述目标位点的线速度、所述目标位点到所述施加机构的距离、以及所述目标物施加至所述目标位点的角度皆保持恒定;其中,所述运动方案包括所述异形回转体绕所述回转中心的旋转运动,以及所述异形回转体和所述施加机构的相对移动;
9.同时,利用所述施加机构将所述目标物施加至所述操作轮廓上的所述目标位点,以进行焊接或喷涂处理。
10.可选地,所述规划运动方案的过程包括:
11.步骤s11:规划第一运动方案,所述第一运动方案包括同时执行的如下步骤:
12.令所述操作轮廓绕所述回转中心沿第一方向做旋转运动;
13.令所述回转中心绕预定位点沿所述第一方向做旋转运动;
14.步骤s12:在软件上按照所述第一运动方案对所述操作轮廓做模拟运动,得到所述回转中心相对于所述施加机构的运动轨迹;
15.步骤s13:规划第二运动方案,所述第二运动方案包括在所述生产装置上执行的如下步骤:
16.第一子运动方案,包括:驱使所述异形回转体绕所述回转中心沿所述第一方向做旋转运动,且所述异形回转体绕所述回转中心的旋转速度与所述第一运动方案中所述操作轮廓绕所述回转中心的旋转速度相同;
17.第二子运动方案,包括:驱使所述异形回转体和所述施加机构做相对移动,以使所述回转中心按照所述运动轨迹相对于所述施加机构运动。
18.可选地,所述施加机构设置在所述异形回转体的上方或下方,且在所述第二子运动方案中,驱使所述异形回转体和所述施加机构做相对移动的步骤包括:
19.驱使所述异形回转体沿水平方向移动,同时驱使所述施加机构沿竖向方向移动。
20.可选地,所述操作轮廓包括多个依次连接的圆弧,并依据所述圆弧的数量、每个所述圆弧的半径、以及每个所述圆弧的圆心角确定所述第一运动方案。
21.可选地,所述操作轮廓具有相互垂直的第一轴和第二轴,所述第一轴和所述第二轴皆经过所述回转中心,且所述第一轴平行于所述操作轮廓的最小外接矩形的一条边;
22.在规划所述第一运动方案之前,还包括在所述生产装置上调整所述异形回转体的位置,以使所述第一轴平行于所述施加机构的轴线。
23.可选地,所述第一轴与所述施加机构的轴线重合。
24.可选地,所述操作轮廓包括按照顺时针方向依次首尾相连的第一圆弧、第二圆弧、第三圆弧及第四圆弧;其中,所述第一圆弧和所述第三圆弧分布在所述第二轴的两侧,所述第二圆弧和所述第四圆弧分布在所述第一轴的两侧;所述第一圆弧的圆心与所述第三圆弧的圆心皆位于所述第一轴上;按照顺时针方向,所述第一圆弧的圆心角被所述第一轴划分为第一子圆心角和第二子圆心角,所述第一子圆心角的角度为第一角度,所述第二子圆心角的角度为第二角度,所述第二圆弧的圆心角的角度为第三角度,所述第三圆弧的圆心角的角度为第四角度,所述第四圆弧的圆心角的角度为第五角度;
25.其中,所述第一运动方案包括依次执行的如下步骤:
26.步骤s111:令所述回转中心绕所述第一圆弧的圆心沿所述第一方向以第一角速度旋转,同时令所述操作轮廓绕所述回转中心沿所述第一方向以所述第一角速度旋转,所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为所述第一角度;
27.步骤s112:令所述回转中心绕所述第四圆弧的圆心沿所述第一方向以第二角速度旋转,同时令所述操作轮廓绕所述回转中心沿所述第一方向以所述第二角速度旋转,所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为所述第五角度;
28.步骤s113:令所述回转中心绕所述第三圆弧的圆心沿所述第一方向以第三角速度旋转,同时令所述操作轮廓绕所述回转中心沿所述第一方向以所述第三角速度旋转,所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为所述第四角度;
29.步骤s114:令所述回转中心绕所述第二圆弧的圆心沿所述第一方向以第四角速度旋转,同时令所述操作轮廓绕所述回转中心沿所述第一方向以所述第四角速度旋转,所述
回转中心及所述操作轮廓的旋转角度皆为所述第三角度;
30.步骤s115:令所述回转中心绕所述第一圆弧的圆心沿所述第一方向以所述第一角速度旋转,同时令所述操作轮廓绕所述回转中心沿所述第一方向以所述第一角速度旋转,所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为所述第二角度;
31.其中,所述第一圆弧的半径与所述第一角速度的乘积、所述第四圆弧的半径与所述第二角速度的乘积、所述第三圆弧的半径与所述第三角速度的乘积,以及所述第二圆弧的半径与所述第四角速度的乘积相等。
32.可选地,所述第一子运动方案还包括依次执行的以下步骤:
33.步骤s131:驱使所述异形回转体绕所述回转中心沿所述第一方向以所述第一角速度旋转,旋转的角度为所述第一角度;
34.步骤s132:驱使所述异形回转体绕所述回转中心沿所述第一方向以所述第二角速度旋转,旋转的角度为所述第五角度;
35.步骤s133:驱使所述异形回转体绕所述回转中心沿所述第一方向以所述第三角速度旋转,旋转的角度为所述第四角度;
36.步骤s134:驱使所述异形回转体绕所述回转中心沿所述第一方向以所述第四角速度旋转,旋转的角度为所述第三角度;
37.步骤s135:驱使所述异形回转体绕所述回转中心沿所述第一方向以所述第一角速度旋转,旋转的角度为所述第二角度。
38.可选地,当所述操作轮廓为非中心对称图形时,通过以下方法确定所述回转中心:
39.确定所述操作轮廓的最小外接矩形,所述最小外接矩形具有相邻的第一边和第二边;
40.在所述第一边的延伸方向上,确定所述操作轮廓上距离最大的两点之间的连线,并在所述第二边的延伸方向上,确定所述操作轮廓上距离最大的两点之间的连线;
41.将两条连线的交点确定为所述回转中心。
42.为实现上述目的,本发明还提供了一种生产装置,用于实施如前任一项所述的异形回转体的处理方法,包括安装座、施加机构、控制单元及驱动机构,所述控制单元与所述驱动机构通信连接;其中,
43.所述安装座用于安装所述异形回转体;
44.所述施加机构用于将目标物施加至所述异形回转体的操作轮廓上;
45.所述控制单元用于规划运动方案,并控制所述驱动机构驱使所述异形回转体和所述施加机构按照所述运动方案做相对运动,以及控制所述驱动机构驱动所述异形回转体绕所述回转中心做旋转运动。
46.可选地,所述运动方案包括同时执行的第一子运动方案和第二子运动方案;所述第一子运动方案包括驱使所述异形回转体绕所述回转中心沿第一方向做旋转运动;所述第二子运动方案包括驱使所述异形回转体和所述施加机构做相对运动,以及驱使所述回转中心按照预设的运动轨迹相对于所述施加机构运动。
47.可选地,所述施加机构设置在所述异形回转体的上方或下方,所述第二子运动方案包括同时执行的所述异形回转体沿水平方向的移动和所述施加机构沿竖直方向的移动;
48.其中,所述驱动机构包括第一子驱动机构、第二子驱动机构和第三子驱动机构;所
述第一子驱动机构用于驱动所述安装座旋转以带动所述异形回转体绕所述回转中心做旋转运动;所述第二子驱动机构用于驱动所述安装座沿水平方向移动;所述第三子驱动机构用于驱动所述施加机构沿竖直方向移动。
49.可选地,所述第一子驱动机构、所述第二子驱动机构和所述第三子驱动机构中的至少一个为伺服电机。
50.与现有技术相比,本发明的异形回转体的处理方法及生产装置具有如下优点:
51.所述生产装置用于实现所述异形回转体的处理方法,所述生产装置具有施加机构,所述异形回转体具有一操作轮廓,所述操作轮廓具有一回转中心,所述施加机构用于将目标物施加于所述操作轮廓上,所述处理方法包括:规划一运动方案;执行焊接或喷涂处理,包括:
52.驱使所述异形回转体和所述施加机构按照所述运动方案运动,使得所述操作轮廓上的任意一点经过所述施加机构的工作区而成为所述目标位点时,所述目标位点的线速度、所述目标位点到所述施加机构的距离、以及所述目标物施加至所述目标位点的角度皆保持恒定;其中,所述运动方案包括所述异形回转体绕所述回转中心的旋转运动,以及所述异形回转体和所述施加机构的相对移动;同时,利用所述施加机构将所述目标物施加至所述操作轮廓上的所述目标位点,以进行焊接或喷涂处理。通过对异形回转体和施加机构的运动进行设计,使得在生产装置上对所述异形回转体执行焊接或喷涂处理时,所述操作轮廓上任意一点成为目标位点时,目标位点的线速度及其到施加机构的距离,以及目标物施加至所述操作轮廓上的角度皆保持恒定,达到提高焊接或喷涂均匀性的目的。
附图说明
53.图1a是现有技术中对回转体进行激光焊接的示意图;
54.图1b是图1a所示回转体的a-a剖视图;
55.图2a是一异形回转体的操作轮廓的示意图;
56.图2b是现有技术中,对图2a所示的异形回转体进行激光焊接时,操作轮廓的旋转示意图;
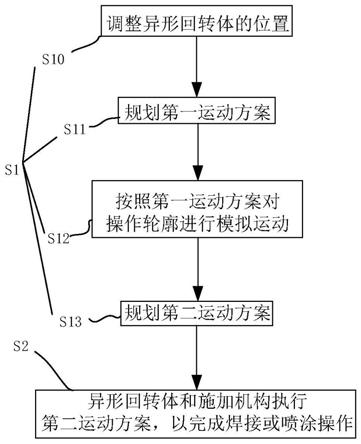
57.图3是本发明根据一实施例所提供的异形回转体的处理方法的流程图;
58.图4是本发明根据实施例一所提供的异形回转体的处理方法中,对异形回转体的操作轮廓的分解示意图,本实施例中的异形回转体的操作轮廓为回转中心对称图形;
59.图5是本发明根据实施例一所提供的异形回转体的处理方法中,对异形回转体的操作轮廓进行模拟运动时的示意图;
60.图6是本发明根据实施例二所提供的异形回转体的处理方法中,对异形回转体的操作轮廓进行模拟运动后所得的回转中心的轨迹示意图,本实施例中操作轮廓为轴对称图形;
61.图7是本发明根据实施例三所提供的异形回转体的处理方法中,对异形回转体的操作轮廓进行模拟运动后所得的回转中心的轨迹示意图,本实施例中操作轮廓为非对称图形;
62.图8a是本发明根据一实施例所提供的生产装置的整体框架示意图;
63.图8b是本发明根据一实施例所提供的生产装置的结构示意图。
具体实施方式
64.为使本发明的目的、优点和特征更加清楚,以下结合附图对本发明作进一步详细说明。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
65.如在本说明书中所使用的,单数形式“一”、“一个”以及“该”包括复数对象,复数对象“多个”包括两个以上的对象,除非内容另外明确指出外。如在本说明书中所使用的,术语“或”是以包括“和/或”的含义而进行使用的,除非内容另外明确指出外,以及术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可以是机械连接,也可以是电连接。可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。附图中相同或相似的附图标记代表相同或相似的部件。
66.如背景技术,对于异性回转体的非圆形的焊接轮廓而言,其利用自身的匀速旋转运动进行激光焊接时,焊接质量不均匀。具体地,请参考图2b,所述焊接轮廓10’为椭圆形,且所述焊接轮廓的回转中心o0到所述激光镜头2’的距离为h,点a到所述焊接轮廓的回转中心o0的距离为r,点b到所述焊接轮廓的回转中心的距离为r
c
,点c到所述焊接轮廓的回转中心的距离为r
d
,且r、r
c
、r
d
不相等。所述焊接轮廓匀速旋转(旋转速度为ω)以使所述焊接轮廓上不同的点例如点a、点b、点c旋转至激光镜头2’的工作区时,点a到所述激光镜头的距离为h-r,点a的线速度为ω*r,点b到所述激光镜头2’的距离为h-r
c
,点a的线速度为ω*r
c
,点c到所述激光镜头2’的距离为h-r
d
,点a的线速度为ω*r
d
。由此,点a、点b及点c的线速度,以及点a、点b及点c到激光镜头2’的距离皆不相等。同时,激光束与点a、点b及点c处的切线所形成的夹角也不相等。由此,该椭圆形的焊接轮廓在焊接完成后形成的焊缝不均匀,导致异形回转体的焊接质量不佳。而异形回转体的喷涂操作与上述焊接操作类似,因此,亦由于同样的原因存在喷涂不均匀的问题。
67.有鉴于此,本发明提供一种异形回转体的处理方法,该方法可有效改善具有异形回转体的焊接或喷涂均匀性。应知晓,所述“异形”是指回转体垂直于回转轴线的截面即横截面为非圆形图形。
68.本发明提供的一种异形回转体的处理方法,用于利用一生产装置对异形回转体进行焊接或喷涂处理。所述生产装置具有施加机构,所述异形回转体的横截面的外轮廓为所述异形回转体的操作轮廓,所述施加机构用于将目标物施加至所述操作轮廓上。所述操作轮廓具有一回转中心。如图3所示,所述异形回转体的处理方法包括:
69.步骤s1:规划一运动方案。
70.步骤s2:执行焊接或喷涂处理,包括:驱使所述异形回转体和所述施加机构按照所述运动方案运动,以使所述操作轮廓上的任意一点经过所述施加机构的工作区而成为目标位点时,所述目标位点的线速度、所述目标位点到所述施加机构的距离、以及所述目标物施加至所述目标位点的角度皆保持恒定;其中,所述运动方案包括所述异形回转体绕所述回转中心的旋转运动,以及所述异形回转体和所述施加机构之间的相对移动。
71.同时,利用所述施加机构将所述目标物施加至所述操作轮廓上的所述目标位点,以进行焊接或喷涂处理。
72.其中,所述异形回转体绕所述回转中心做旋转运动,及所述异形回转体和所述实际机构之间做相对运动是同时进行的。
73.一般地,本领域技术人员可通过计算机软件例如各类运动模拟软件进行所述运动方案的规划,这对于本领域技术人员而言是可以习知的内容。此外,本领域技术人员可理解,在对异形回转体进行焊接操作时,所述施加机构为激光镜头,施加机构的工作区例如是激光镜头的焦点,所述目标物为激光束。在进行喷涂操作时,所述施加机构为喷枪,所述施加机构的工作区为喷枪的喷嘴所正对的位置,所述目标物为胶、漆或其他待喷涂的物质。
74.请继续参考图3,在一个示范性的实施例中,所述规划运动方案的过程包括:
75.步骤s11:规划第一运动方案,所述第一运动方案包括同时执行的如下步骤:
76.令所述操作轮廓绕所述回转中心沿第一方向做旋转运动;
77.令所述回转中心绕预定位点沿所述第一方向做旋转运动;
78.步骤s12:在软件上按照所述第一运动方案对所述操作轮廓做模拟运动,得到所述回转中心相对于所述施加机构的运动轨迹;
79.步骤s13:规划第二运动方案,所述第二运动方案包括在所述生产装置上执行的如下步骤:
80.第一子运动方案,包括:驱使所述异形回转体绕所述回转中心沿所述第一方向做旋转运动,且所述异形回转体绕所述回转中心的旋转速度与所述第一运动方案中所述操作轮廓绕所述回转中心的旋转速度相同;
81.第二子运动方案,包括:驱使所述异形回转体和所述施加机构做相对移动,以使所述回转中心按照所述运动轨迹相对于所述施加机构运动。
82.即,在执行焊接或喷涂处理时,所述异形回转体和所述施加机构执行所述第二运动方案。
83.应知晓,所述第一方向是顺时针方向或逆时针方向,本文的实施例中以所述第一方向为顺时针方向为例进行介绍,但本领域技术人员能够修改本文中的描述,以将其应用于第一方向为逆时针方向时的情况。所述预定位点在所述第一方案中并不是一个固定不变的点,其根据实际情况改变,但都是人为设定的点。
84.还应知晓的是,本实施例中所述的第一运动方案仅能在软件上执行,而无法在实际生产中执行。因此,还需要利用所述第一运动方案及通过模拟运动而得到的所述回转中心的所述运动轨迹来设计可在所述生产装置上执行的第二运动方案,从而在执行焊接或喷涂工艺时,所述异形回转体和所述施加机构可按照所述第二运动方案运动。但在其他替代性的实施例中,若通过软件规划的第一运动方案可以直接在所述生产装置上执行,则无需继续规划第二运动方案,此时在执行焊接或喷涂处理时,所述异形回转体和所述施加机构直接执行所述第一运动方案即可。
85.通常情况下,在所述生产装置中,所述施加机构设置于所述异形回转体的上方或下方。因此,所述第二子运动方案的一种可选方式为所述异形回转体同时做水平向运动和竖向运动。所述第二子运动方案的另一种可选方式为所述异形回转体做水平向运动,同时所述施加机构做竖向运动。所述第二子运动方案的再一种可选方式为所述异形回转体做竖向运动,同时所述施加机构做水平向运动。对此,本发明实施例不作限制。但在一个优选实施例中,从便于控制,以及简化所述生产装置的结构的角度考虑,所述第二子运动方案包括
同时执行的所述异形回转体的水平向运动和所述施加机构的竖向运动。可理解,所述异形回转体的水平向运动的速度,以及所述施加机构的竖向运动的速度根据实际需要进行设计,只要其确保所述回转中心相对于所述施加机构按照所述运动轨迹移动即可。应知晓,以上所述的“同时执行”是指相应的运动同时开始、同时结束。
86.所述异形回转体具有相互垂直的第一轴和第二轴,所述第一轴和所述第二轴皆经过所述回转中心,且所述第一轴平行于所述操作轮廓的最小外接矩形的一条边。在规划所述运动方案之前,所述异形回转体的处理方法还包括:步骤s10:调整所述异形回转体的位置,以使所述第一轴平行于所述施加机构的轴线。优选所述第一轴与所述实际机构的轴线重合。此处,若对所述异形回转体进行焊接操作,所述施加机构的轴线是指激光镜头的轴线,若对所述异形回转体进行喷涂操作,所述实际机构的轴线则是指喷枪之喷嘴的轴线。调整所述异形回转体的位置,以使所述异形回转体的第一轴与所述施加机构的轴线重合,可方便所述运动方案的规划,且对于焊接操作而言,有利于提高激光束的能量利用率,减少浪费。
87.若所述异形回转体的操作轮廓是中心对称图形,则所述回转中心为所述操作轮廓的对称中心,所述第一轴和所述第二轴可根据所述对称中心及所述操作轮廓的最小外接矩形确定。若所述异形回转体的操作轮廓是非中心对称图形,则所述操作轮廓的对称中心及第一轴和第二轴通过如下方法确定:确定所述操作轮廓的最小外接矩形,所述最小外接矩形具有相邻的第一边和第二边。在所述第一边的延伸方向上,确定所述操作轮廓上距离最大的两点之间的连线,并在所述第二边的延伸方向上,确定所述操作轮廓上距离最大的两点之间的连线。将两条连线的交点确定为所述回转中心,且两条连线分别为所述第一轴和所述第二轴。
88.所述异形回转体的操作轮廓是由多个依次连接的圆弧构成。通常,每个所述圆弧皆为外凸的圆弧,且相邻两个圆弧相切设置,以使所述操作轮廓为平滑的曲线结构。本领域技术人员可根据所述操作轮廓中所述圆弧的数量、每个所述圆弧的半径,以及每个所述圆弧的圆心角规划所述第一运动方案。具体地,所述圆弧的数量可用于规划所述预定位点的数量及位置,所述圆弧的半径可用于规划所述焊接轮廓旋转时的角速度,所述圆弧的圆心角可用于确定所述回转中心绕一个所述预定位点旋转的旋转角度。
89.接着,本文将结合附图对所述异形回转体的处理方法做详细说明。以下实施例中,以所述操作轮廓包括四条依次首尾相连的圆弧为例进行说明,但应理解,其并不能对本发明构成限制。本领域技术人员可对以下方案进行相应修改,以使其适用于所述操作轮廓由三条、五条或更多条圆弧连接组成时的情况。
90.实施例一
91.如图4所示,本实施例中的操作轮廓为回转中心对称图形,其包括四条依次首尾相连的圆弧,分别为第一圆弧11、第二圆弧12、第三圆弧13及第四圆弧14。其中,所述第一圆弧11和所述第三圆弧13关于所述第二轴l2对称设置,所述第二圆弧12和所述第四圆弧14关于所述第一轴l1对称设置。所述操作轮廓的回转中心为o,所述第一圆弧11的圆心为o1,所述第二圆弧12的圆心为o2,所述第三圆弧13的圆心为o3,所述第四圆弧14的圆心为o4,且所述第一圆弧11的圆心o1和所述第三圆弧13的圆心o3皆位于所述第一轴l1上。所述第一圆弧11及所述第三圆弧13的半径为r1,圆心角为α,所述第二圆弧12及所述第四圆弧14的半径为r2,圆
心角为β。在模拟运动开始前,所述第一轴l1与所述施加机构(图中未示出)的轴线重合,此时所述操作轮廓的位置为图5中实线所示的s。
92.所述第一运动方案包括:
93.首先,所述回转中心o绕所述第一圆弧11的圆心o1以第一角速度ω1做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第一角速度ω1做顺时针旋转。所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为α/2,此时所述操作轮廓的位置为图6中虚线所示的s’。此过程中所述回转中心o的轨迹为a1。
94.接着,所述回转中心o绕所述第四圆弧14的圆心o4以第二角速度ω2做顺时针旋转,所述操作轮廓绕所述回转中心o以所述第二角速度ω2做顺时针旋转。所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为β。此时,所述操作轮廓为图5中虚线所示的s”。此过程中,所述回转中心o的轨迹为a2。
95.接着,所述回转中心o绕所述第三圆弧13的圆心o3以所述第三角速度ω3做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第三角速度ω1做顺时针旋转。所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为α/2。此时,所述操作轮廓回到图5中实线所示的s。此过程中,所述回转中心的轨迹为a3。
96.接着,所述回转中心o绕所述第三圆弧13的圆心o3以第三角速度ω4做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第四角速度ω4做顺时针旋转。所述回转中心o的旋转角度及所述操作轮廓的旋转角度皆为α/2。此时,所述操作轮廓回到图5中虚线所示的s’。此过程中,所述回转中心的轨迹为a1。
97.接着,所述回转中心o绕所述第二圆弧12的圆心o2以第四角速度ω4做顺时针旋转,所述操作轮廓绕所述回转中心o以所述第四角速度ω4做顺时针旋转。所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为β。此时,所述操作轮廓为图5中虚线所示的s”。此过程中,所述回转中心o的轨迹为a2。
98.最后,所述回转中心绕所述第一圆弧11的圆心o1以第一角速度ω1做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第一角速度ω1做顺时针旋转。所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为α/2,此时所述操作轮廓的位置为图5中实线所示的s。此过程中所述回转中心o的轨迹为a3。
99.在以上过程中,通过对所述第一角速度ω1、第二角速度ω2、第三角速度ω3、第四角速度ω4进行合理的设置,以使所述操作轮廓上的各点的线速度相等。本实施例中,所述操作轮廓为回转中心对称图形,因而所述第一角速度ω1和所述第三角速度ω3相等,所述第二角速度ω2和所述第四角速度ω4相等,且ω1*r1=ω3*r2,以使所述操作轮廓上各点的线速度相等。
100.当所述控制单元按照所述第一运动方案对所述操作轮廓进行模拟运动时,得到所述回转中心的运动轨迹为a
1-a
2-a
3-a
1-a
2-a3。
101.实际生产过程中,所述异形回转体不可能实现上述第一运动方案,因而可通过将所述回转中心相对于所述施加机构的运动分解为所述异形回转体的水平向运动和所述施加机构的竖向移动。故而,所述第二运动方案包括同时执行的第一子运动方案和第二子运动方案。
102.所述第一子运动方案即为所述异形回转体绕所述回转中心做旋转运动,具体包
括:
103.首先,所述异形回转体以所述第一角速度ω1做顺时针旋转,旋转的角度为α/2。
104.接着,所述异形回转体以所述第二角速度ω2做顺时针旋转,旋转的角度为β。
105.接着,所述异形回转体以所述第三角速度ω3做顺时针旋转,旋转的角度为α。
106.接着,所述异形回转体以所述第四角速度ω4做顺时针旋转,旋转的角度为β。
107.最后,所述异形回转体以所述第一角速度ω1做顺时针旋转,旋转的角度为α/2。
108.所述第二子运动方案包括所述异形回转体的水平向运动和所述施加机构的竖向运动,且当所述异形回转体和所述施加机构执行所述第二子运动方案时,所述回转中心相对于所述施加机构沿a
1-a
2-a
3-a
1-a
2-a3运动。
109.实施例二
110.如图6所示,本实施例中,所述操作轮廓为轴对称图形,并包括依次首尾连接的第一圆弧11、第二圆弧12、第三圆弧13及第四圆弧14,所述第一圆弧11和所述第三圆弧13分布在第二轴l2的两侧,所述第二圆弧12和所述第四圆弧14对称地分布在第一轴l1的两侧。所述操作轮廓的回转中心为o,所述第一圆弧11的圆心为o1,半径为r1,圆心角为α,所述第二圆弧12的圆心为o2,半径为r2,圆心角为β,所述第三圆弧13的圆心为o3,半径为r3,圆心角为λ,所述第四圆弧14的圆心为o4,半径为r2,圆心角为β,且所述第一圆弧11的圆心o1和所述第三圆弧13的圆心o3皆位于所述第一轴上。在模拟运动开始前,所述第一轴l1与所述施加机构(图中未示出)的轴线重合。
111.所述第一运动方案包括:
112.首先,所述回转中心o绕所述第一圆弧11的圆心o1以第一角速度ω1做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第一角速度ω1做顺时针旋转,所述回转中心o的旋转角度及所述操作轮廓的旋转角度皆为α/2。
113.接着,所述回转中心o绕所述第四圆弧14的圆心o4以第二角速度ω2做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第二角速度ω2做顺时针旋转,所述回转中心o的旋转角度及所述操作轮廓的旋转角度皆为β。
114.接着,所述回转中心o绕所述第三圆弧13的圆心o3以第三角速度ω3做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第三角速度ω3做顺时针旋转,所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为γ。
115.接着,所述回转中心o绕所述第二圆弧12的圆心o2以第四角速度ω4做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第四角速度ω2做顺时针旋转,所述回转中心o及所述操作轮廓的旋转角度皆为β。
116.最后,所述回转中心o绕所述第一圆弧11的圆心o1以所述第一角速度ω1做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第一角速度ω1做顺时针旋转,所述回转中心的旋转角度及所述操作轮廓的旋转角度皆为α/2。
117.本实施例中,所述操作轮廓为所述第二圆弧12与所述第四圆弧14对称设置,因而所述第二角速度ω2和所述第四角速度ω4相等,且ω1*r1=ω2*r2=ω3*r3。
118.按照上述第一运动方案对所述操作轮廓进行模拟运动后,得到所述回转中心o的运动轨迹如图7中p所示。
119.类似于实施例一,本实施例中所述第二运动方案包括同时执行的第一子运动方案
和第二子运动方案。其中,所述第一子运动方案包括:
120.首先,所述异形回转体绕所述回转中心o以所述第一角速度ω1做顺时针转动旋转,旋转的角度为α/2;
121.接着,所述异形回转体绕所述回转中心o以所述第二角速度ω2做顺时针旋转,旋转的角度为β;
122.接着,所述异形回转体绕所述回转中心o以所述第三角速度ω3做顺时针旋转,旋转的角度为γ;
123.接着,所述异形回转体绕所述回转中心o以所述第四角速度ω4旋转,旋转的角度为β;
124.最后,所述异形回转体绕所述回转中心o以所述第一角速度ω1旋转,旋转的角度为α/2。
125.所述第二子运动方案包括所述异形回转体的水平向运动,以及所述施加机构的竖向运动。当所述异形回转体和所述施加机构执行所述第二子运动方案时,所述回转中心相对于所述施加机构沿所述运动轨迹p移动。
126.实施例三
127.本实施例中,如图7所示,所述操作轮廓为非对称图形。所述操作轮廓包括依次首尾相连的第一圆弧11、第二圆弧12、第三圆弧13及第四圆弧14。其中,所述第一圆弧11和所述第三圆弧13分布在第二轴l2的两侧,所述第二圆弧12和所述第四圆弧14分布在第一轴l1的两侧。所述操作轮廓的回转中心为o,所述第一圆弧11的圆心为o1,半径为r1,圆心角为α,所述第二圆弧12的圆心为o2,半径为r2,圆心角为β,所述第三圆弧13的圆心为o3,半径为r3,圆心角为γ,所述第四圆弧14的圆心为o4,半径为r4,圆心角为θ。所述第一轴l1经过所述第一圆弧11的圆心o1和所述第三圆弧13的圆心o3,按照顺时针方向,圆心角α被所述第一轴划分为角α1和角α2。在模拟运动开始之前,所述第一轴l1与所述施加机构(图中未示出)的轴线重合。
128.所述第一运动方案包括如下步骤:
129.首先,所述回转中心o绕所述第一圆弧11的圆心o1以第一角速度ω1做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第一角速度ω1做顺时针旋转,所述回转中心o的旋转角度及所述操作轮廓的旋转角度皆为α1;
130.接着,所述回转中心o绕所述第四圆弧14的圆心o4以第二角速度ω2做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第二角速度ω2做顺时针旋转,所述回转中心o的旋转角度及所述操作轮廓的旋转角度皆为θ;
131.接着,所述回转中心o绕所述第三圆弧13的圆心o3以第三角速度ω3做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第三角速度ω3做顺时针旋转,所述回转中心o的旋转角度及所述操作轮廓的旋转角度皆为γ;
132.接着,所述回转中心o绕所述第二圆弧12的圆心o2以第四角速度ω4做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第四角速度ω4做顺时针旋转,所述回转中心o及所述操作轮廓的旋转角度皆为β;
133.最后,所述回转中心o绕所述第一圆弧11的圆心o1以所述第一角速度ω1做顺时针旋转,同时所述操作轮廓绕所述回转中心o以所述第一角速度ω1做顺时针旋转,所述回转
中心o的旋转角度及所述操作轮廓的旋转角度皆为α2。
134.其中,ω1*r1=ω2*r2=ω3*r3=ω4*r4。
135.按照上述第一运动方案对所述操作轮廓做模拟运动后,得到所述回转中心o的运动轨迹如图8中q所示。
136.类似于实施例一及实施例二,本实施例中所述第二运动方案包括同时执行的第一子运动方案和第二子运动方案。其中,所述第一子运动方案包括:
137.首先,所述异形回转体绕所述回转中心o以所述第一角速度ω1做顺时针旋转,旋转的角度为α1;
138.接着,所述异形回转体绕所述回转中心o以所述第二角速度ω2做顺时针旋转,旋转的角度为θ;
139.接着,所述异形回转体绕所述回转中心o以所述第三角速度ω3做顺时针旋转,旋转的角度为γ;
140.接着,所述异形回转体绕所述回转中心o以所述第四角速度ω4做顺时针旋转,旋转的角度为β;
141.最后,所述异形回转体绕所述回转中心o以所述第一角速度ω1做顺时针旋转,旋转的角度为α2。
142.所述第二子运动方案包括所述异形回转体的水平向运动,以及所述施加机构的竖向运动。当所述异形回转体和所述施加机构执行所述第二子运动方案时,所述回转中心相对于所述施加机构沿所述运动轨迹q移动。
143.进一步地,如图8a及图8b所示,本发明实施例还提供了一种生产装置,以用于执行所述异形回转体的处理方法,所述生产装置包括安装座100、施加机构200、控制单元300及驱动机构400。所述控制机构300与所述驱动机构400通信连接。其中,所述安装座100用于安装所述异形回转体。所述施加机构200用于将目标物施加至所述异形回转体的所述操作轮廓上。所述控制单元300用于规划所述运动方案,并控制所述驱动机构驱使所述异形回转体和所述施加机构200做相对运动,以及控制所述异形回转体绕所述回转中心做旋转运动。
144.可理解,当对所述异形回转体进行焊接操作例如激光焊接时,所述生产装置为激光焊接装置,所述施加机构200为激光镜头,所述目标物为激光束。当对所述异形回转体进行喷涂操作时,所述生产装置为喷涂装置,所述施加机构200为喷枪,所述目标物为漆、胶或其他待喷涂物。
145.进一步地,所述运动方案包括同时执行的第一子运动方案和第二子运动方案;所述第一子运动方案包括驱使所述异形回转体绕所述回转中心沿第一方向做旋转运动;所述第二子运动方案包括驱使所述异形回转体和所述施加机构200做相对运动,以及驱使所述回转中心按照预设的运动轨迹相对于所述施加机构200运动。
146.所述施加机构200设置于所述异形回转体的上方或下方,所述第二子运动方案包括同时执行的所述异形回转体沿水平向的移动和所述施加机构200沿竖向的移动。基于此,所述生产装置的所述驱动机构400包括第一子驱动机构410、第二子驱动机构420及第三子驱动机构430。其中,所述第一子驱动机构410与所述安装座100连接,并用于驱动所述安装座100旋转,以带动所述异形回转体绕所述回转中心做旋转运动。所述第二子驱动机构420与所述安装座100连接,并用于驱动所述安装座100做水平向运动以带动所述异形回转体做
水平向运动。所述第三子驱动机构430与所述施加机构200连接,并用于驱动所述施加机构200做竖向运动。
147.较佳地,所述第一子驱动机构410、所述第二子驱动机构420及所述第三子驱动机构430皆为伺服电机,以提高运动精度。
148.虽然本发明披露如上,但并不局限于此。本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

