1.本实用新型具体涉及教育培训设备技术领域,具体为一种双臂机器人教育实训台。
背景技术:
2.当前机器人教育实训台所使用的是单臂机器人,这样的机器人只适应于特定的产品和工作环境,并且依赖于所提供的专用设备和工夹具。一般地,单臂机器人只适合于刚性工件的操作,并受制于环境;且在处理一些需要双臂配合任务时,工作效率低下或是完全不能完成。随着现代工业的发展和科学技术的进步,对于许多任务而言单臂操作是不够的。
3.在现有技术中,双臂机器人教育实训台逐渐取代单臂机器人作为教育实训台,双臂机器人可以通过双手同时操作,完成更为复杂的操作。然而,在完成更为复杂的操作时,传统的夹持方式定位较为不便,并且若夹持力度较大,则容易导致夹伤工件;而夹持力度较小,则容易在操作时打滑。
技术实现要素:
4.本实用新型的目的在于针对现有技术的不足之处,提供一种双臂机器人教育实训台,以达到灵敏度高、信息采集度较佳的目的。
5.为实现上述目的,本实用新型提供如下技术方案:一种双臂机器人教育实训台,包括实训台本体,所述实训台本体上设置有双臂机器人,还包括:
6.两个夹持机构,两个所述夹持机构分别与双臂机器人的双臂固定连接设置,所述夹持机构包括卡爪,所述卡爪上开设有多个凹槽,且凹槽内转动连接有位移传感器,所述卡爪靠近位移传感器的侧壁滑动连接有夹块,且夹块的一端固定连接有第一压缩弹簧,所述第一压缩弹簧远离夹块的一端与卡爪固定连接设置,所述卡爪上设置有用于辅助夹持机构定位工件的定位组件。
7.作为优选的,所述定位组件包括导向块,所述导向块卡爪固定连接设置,所述导向块的侧壁开设有导向槽,且导向块靠近导向槽的侧壁开设有通孔,所述通孔通过软管连通有真空泵,且通孔内滑动连接有吸吊管。
8.作为优选的,所述吸吊管包括滑套,且滑套与通孔的内壁滑动连接设置,所述滑套远离导向块的一端固定连接连接管,且连接管远离滑套的一端固定连接有喇叭口,所述导向块靠近通孔的侧壁开设有容纳喇叭口的让位槽。
9.作为优选的,所述喇叭口为橡胶材质。
10.作为优选的,所述卡爪包括主体和爪体,所述导向块与主体固定连接设置,且导向块位于两个爪体之间设置,所述夹块位于爪体上设置。
11.作为优选的,所述夹块靠近卡爪的侧壁为平面,且夹块远离卡爪的一面开设有防滑槽。
12.作为优选的,所述让位槽内固定连接有第二压缩弹簧,且第二压缩弹簧与喇叭口
相抵设置。
13.作为优选的,所述卡爪的侧壁开设有两条滑槽,所述夹块的侧壁固定连接有滑块,且滑块与滑槽滑动连接设置
14.与现有技术相比,该实用新型的有益效果是:
15.1、该种双臂机器人教育实训台,通过设置夹持机构,可以利用夹块对工件进行夹持,并且在发生打滑时,由于夹块与卡爪的摩擦力小于夹块与工件的摩擦力,所以夹块与卡爪相对位移,并且利用位移传感器感应打滑距离,从而修正加工坐标,并且可以提醒用户提高夹持力,继续出现打滑的情况。
16.2、该种双臂机器人教育实训台,通过设置定位装置,可以通过吸吊管配合真空泵利用负压带动工件移动,并配合导向块调整工件位置,从而实现在夹持工件的同时进行精准定位,极大的方便了用户的操作,提高实训效果。
附图说明
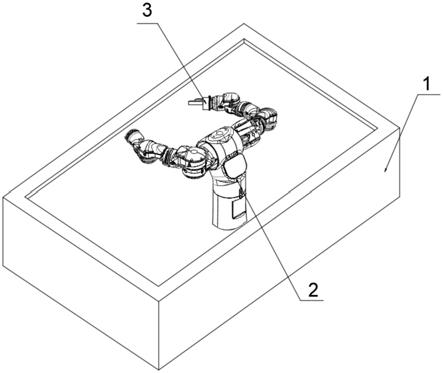
17.图1为本实用新型的整体结构示意图;
18.图2为本实用新型中卡爪的侧视结构示意图;
19.图3为本实用新型中卡爪的局部结构示意图;
20.图4为图2中a处的剖视结构示意图;
21.图5为图2中b处的剖视结构示意图;
22.图中:1、实训台本体;2、双臂机器人;3、卡爪;4、位移传感器;5、夹块;6、第一压缩弹簧;7、导向块;8、通孔;9、吸吊管;91、滑套;92、连接管;93、喇叭口;94、让位槽;31、主体;32、爪体;10、第二压缩弹簧;11、滑槽。
具体实施方式
23.下面结合实施例对本发明做进一步的描述。
24.以下实施例用于说明本发明,但不能用来限制本发明的保护范围。实施例中的条件可以根据具体条件做进一步的调整,在本发明的构思前提下对本发明的方法简单改进都属于本发明要求保护的范围。
25.请参阅图1
‑
5,本实用新型提供一种双臂机器人教育实训台,包括实训台本体1,所述实训台本体1上设置有双臂机器人2,还包括:
26.两个夹持机构,两个所述夹持机构分别与双臂机器人2的双臂固定连接设置,所述夹持机构包括卡爪3,所述卡爪3上开设有多个凹槽,且凹槽内转动连接有位移传感器4,位移传感器4与双臂机器人2电性连接设置,所述卡爪3靠近位移传感器4的侧壁滑动连接有夹块5,且夹块5的一端固定连接有第一压缩弹簧6,所述第一压缩弹簧6远离夹块5的一端与卡爪3固定连接设置,在卡爪3夹持工件时,两个与卡爪3的两个爪体32滑动连接的夹块5对工件进行夹持,而在双臂机器人2运行时,当工件遇到较大的阻力时,由于夹块5与爪体32的摩擦力小于夹块5与工件的摩擦力,这时夹块5与爪体32相对移动,这时位移传感器4将夹块5的位移距离传导至双臂机器人2的控制器中,从而修正加工坐标,并且双臂机器人2可以控制卡爪3增大夹持力,另一方面,通过设置夹块5可以避免工件打滑时,工件与夹具摩擦导致工具划伤损坏,通过设置第一压缩弹簧6,可以在夹块5滑动后,在夹块5松开工件时。
27.所述定位组件包括导向块7,所述导向块7卡爪3固定连接设置,所述导向块7的侧壁开设有导向槽,且导向块7靠近导向槽的侧壁开设有通孔8,所述通孔8通过软管连通有真空泵(图中未示出,真空泵为现有公知技术),且通孔8内滑动连接有吸吊管9,在用户使用卡爪3夹持工件时,双臂机器人2带动卡爪3靠近工件,这时吸吊管9率先靠近工件,在喇叭口93与工件相抵后启动真空泵,在喇叭口93吸取工件,并且随着真空泵的运行,吸吊管9在负压的作用下向通孔8滑动,工件与导向块7相抵,并在导向块7的带动下调整位置,从而做到精准定位,然后在定位完成后,卡爪3夹紧工件。
28.作为本实用新型的进一步方案,所述吸吊管9包括滑套91,且滑套91与通孔8的内壁滑动连接设置,所述滑套91远离导向块7的一端固定连接连接管92,且连接管92远离滑套91的一端固定连接有喇叭口93,所述导向块7靠近通孔8的侧壁开设有容纳喇叭口93的让位槽94,滑套91与通孔8的内壁为过盈配合。
29.作为本实用新型的进一步方案,所述喇叭口93为橡胶材质,橡胶材质的较为柔软,一方面可以提高吸吊管9与工件之间的密封性,保证吸吊效果,另一方面,在工件沿着导向槽位移时,喇叭口93可以通过变形的方式,避免干涉工件位移。
30.作为本实用新型的进一步方案,所述卡爪3包括主体31和爪体32,所述导向块7与主体31固定连接设置,且导向块7位于两个爪体32之间设置,所述夹块5位于爪体32上设置,卡爪3为现有公知技术,其工作原理和具体结构本文不再赘述。
31.作为本实用新型的进一步方案,所述夹块5靠近卡爪3的侧壁为平面,且夹块5远离卡爪3的一面开设有防滑槽,该种设计使夹块5与卡爪3的摩擦力小于夹块5与工件的摩擦力。
32.作为本实用新型的进一步方案,所述让位槽94内固定连接有第二压缩弹簧10,且第二压缩弹簧10与喇叭口93相抵设置,通过设置第二压缩弹簧10,可以避免由于滑套91与通孔8之间的摩擦力过大,导致吸吊管9无法伸出。
33.作为优选的,所述卡爪32的侧壁开设有两条滑槽11,所述夹块5的侧壁固定连接有滑块,且滑块与滑槽11滑动连接设置,通过设置两条滑槽11,可以提高夹块5滑动时的稳定性并控制夹块5的滑动轨迹。
34.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。