1.本实用新型教学考核领域,尤其涉及一种用于教学的协作机器人智能水吧。
背景技术:
2.目前机器人在多个领域扮演了重要的角色,如自动化的生产或自动餐饮,机器人的操作编程人员的需求急剧增加,因此对从事机器人行业的人员进行技能培训与考核十分重要,但在现有技术中相关的教学设备较为匮乏,且现有的对技术人员的培训往往应用在工业生产这一场景中,机器人应用场景单一,无法适用于自动餐饮的场景。
技术实现要素:
3.(一)要解决的技术问题
4.本实用新型提供了一种用于教学的协作机器人智能水吧,旨在解决现有技术中对技术人员的培训无法适用于自动餐饮的问题。
5.(二)技术方案
6.为了解决上述问题,本实用新型提供了一种用于教学的协作机器人智能水吧,所述用于教学的协作机器人智能水吧包括吧台、饮水机和设置在所述吧台的一侧的第一机械臂;
7.所述吧台包括水平设置的工作面板,所述饮水机设置在所述工作面板上,所述工作面板开设有矩形孔,所述矩形孔的下方设置有用于存放托盘的顶升板,所述托盘能够在所述顶升板的作用下向上运动至所述工作面板的上方;所述工作面板上还设置有u型缺口和推送板,所述u型缺口和所述推送板分别位于所述矩形孔的相对两侧,所述推送板能够将所述托盘推送至所述u型缺口的上方;
8.所述第一机械臂的末端设置有末端工具,所述吧台上设置有视觉相机,所述视觉相机位于所述工作面板的上方,且所述视觉相机的镜头朝向所述工作面板,所述末端工具能够抓取茶杯至所述饮水机处接水,并将所述茶杯放置在所述托盘上。
9.优选地,所述吧台上固定安装有顶升控制电机,所述顶升控制电机的输出轴与丝杆连接,所述顶升板上设置有与所述丝杆配合的内螺纹孔,所述顶升板能够在所述丝杆的作用下在竖直方向上往复运动。
10.优选地,所述工作面板上还设置有用于存放所述末端工具的工装架,所述末端工具包括柔性夹爪工具和裱花笔。
11.优选地,所述工作面板上还设置有模拟蛋糕,所述第一机械臂的末端能够通过安装所述裱花笔在所述模拟蛋糕上进行模拟裱花。
12.优选地,所述用于教学的协作机器人智能水吧还包括送餐机器人,所述送餐机器人包括移动平台和设置在移动平台上的第二机械臂,所述第二机械臂的末端安装有机械手,所述移动平台能够运动至所述吧台的一侧,且所述机械手能够从所述u型缺口处夹紧所述托盘。
13.优选地,所述饮水机上设置有多个出水口和用于控制所述出水口的按钮,所述出水口与所述按钮对应。
14.优选地,所述出水口中包括咖啡出口,所述吧台上还设置有多个用于存放咖啡的咖啡杯。
15.优选地,所述用于教学的协作机器人智能水吧还包括自动售卖机,所述自动售卖机安装在所述工作面板上,所述第一机械臂能够通过所述末端工具夹取所述自动售卖机中的物品并将所述自动售卖机中的物品放置在所述托盘上。
16.优选地,所述用于教学的协作机器人智能水吧还包括菜单切换组件,所述菜单切换组件包括切换控制电机和至少三块显示板,所述显示板依次连接形成棱柱,所述棱柱转动安装在所述吧台上,且所述棱柱位于所述工作面板的上方,所述切换控制电机固定安装在所述吧台上,且所述切换控制电机的输出轴与所述棱柱固定连接。
17.(三)有益效果
18.本实用新型通过在吧台的一侧设置第一机械臂,在第一机械臂的末端设置末端工具,同时还在吧台上设置茶杯、茶罐和饮水机,使得本实用新型能够利用机械臂完成制作茶品的工艺。在工作面板的下方设置托盘,且托盘能够在顶升板的作用下运动至工作面板的上方,在工作面板靠近托盘的一侧设置推送板,使得推送板能够将托盘推送至u型缺口处,已达到自动上餐的工艺,进而完成餐饮制作与上餐的模拟教学和考核。
附图说明
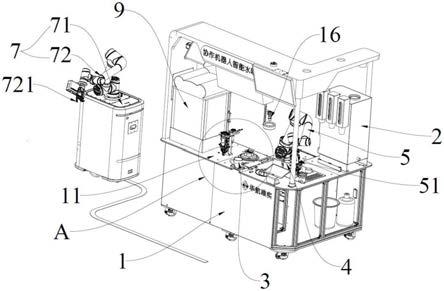
19.图1为本实用新型一种用于教学的协作机器人智能水吧的结构示意图;
20.图2为图1在a处的放大图;
21.图3为本实用新型一种用于教学的协作机器人智能水吧另一视角的结构示意图;
22.图4为图3在b处的放大图;
23.图5为实施例1中一种用于教学的协作机器人智能水吧的结构示意图。
24.【附图标记说明】
25.1:吧台;11:工作面板;110:矩形孔;111:u型缺口;12:顶升板;121:顶升控制电机;122:丝杆;13:推送板;131:推送气缸;14:工装架;15:模拟蛋糕;16:视觉相机;17:菜单切换组件;171:显示板;172:切换控制电机。
26.2:饮水机;3:茶杯;4:茶罐;5:第一机械臂;51:末端工具;511:柔性夹爪工具;512:裱花笔;6:托盘;7:送餐机器人;71:移动平台;72:第二机械臂;721:机械手;8:咖啡杯;9:自动售卖机。
具体实施方式
27.为了更好的解释本实用新型,以便于理解,下面结合附图,通过具体实施方式,对本实用新型作详细描述。
28.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
29.另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理
解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
30.在本实用新型中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
31.如图1至图4所示,本实用新型提供了一种用于教学的协作机器人智能水吧,其中用于教学的协作机器人智能水吧包括吧台1、饮水机2、茶杯3、茶罐4和设置在吧台1一侧的第一机械臂5,在优选的实施方案中,第一机械臂5可以为六轴机械臂,六轴机械臂应用广泛,且能够在一定空间中完成复杂的运动,便于后续的教学模拟。吧台1包括水平设置的工作面板11,饮水机2、茶杯3和茶罐4均设置在工作面板11上,工作面板11开设有矩形孔110,矩形孔110的下方设置有用于存放托盘6的顶升板12,托盘6能够在顶升板12的作用下向上运动至工作面板11的上方;工作面板11上还设置有u型缺口111和推送板13,u型缺口111和推送板13分别位于矩形孔110的相对两侧,推送板13能够将托盘6推送至u型缺口111的上方。第一机械臂5的末端设置有末端工具51,吧台1上设置有视觉相机16,视觉相机16位于工作面板11的上方,且视觉相机16的镜头朝向工作面板11,第一机械臂5能够与视觉相机16进行通信,视觉相机16能够对第一机械臂5的运动进行反馈,使得第一机械臂5能够在视觉相机16所感知的范围内精确运动,进而精确的夹取相关物品,末端工具51能够抓取茶杯3至饮水机2处接水,并将茶杯3放置在托盘6上。在更加具体的实施例中,用于教学的协作机器人智能水吧还包括设置在工作面板11上的下单平板,其中下单平板能够与第一机械臂5通信,当有人在下单平板上下了订单后,根据订单的信息,第一机械臂5能够通过末端工具51进行对应的工作。例如当订单为茶品时,第一机械臂5会通过末端工具51夹取茶罐4中适量的茶叶至茶杯3,然后夹取茶杯3至饮水机2处取水,再将茶杯3放置在托盘6上,最后茶杯3随托盘6被推送板13推送至u型缺口111处,完成订单。具体的茶品制作工艺还能够根据教学需要进行调加。进一步地,如图2和图4所示,吧台1上固定安装有顶升控制电机121,顶升控制电机121的输出轴与丝杆122连接,顶升板12上设置有与丝杆122配合的内螺纹孔,顶升板12能够在丝杆122的作用下在竖直方向上往复运动,使得托盘6运动至工作面板11的上方,当没有订单时,顶升控制电机121通过丝杆122带动顶升板12沿竖直方向向下运动,使得托盘6位于工作面板11的下方;当有订单时,顶升控制电机121通过丝杆122带动顶升板12沿竖直方向向上顶升,使得托盘6运动至工作面板11的上方,使得托盘6用于盛放茶杯3,方便客户取单,其中,顶升控制电机121可以为伺服电机,将伺服电机设置在工作面板11的下方,保持了工作面板11的整洁,提高了空间利用率,同时还训练了学员对于伺服电机的控制,便于后续开展与伺服电机的控制相关的考核与教学。推送板13的一侧固定安装有推送气缸131,推送气缸131的活塞杆的一端固定在吧台1上。推送板13能够将位于工作面板11上方的托盘6推送至u型缺口111处,以便于后续的送餐工艺流程。
32.更进一步地,工作面板11上还设置有用于存放末端工具51的工装架14,末端工具51包括柔性夹爪工具511和裱花笔512。具体地,工作面板11上还设置有模拟蛋糕15,第一机
械臂5的末端能够通过安装裱花笔512在模拟蛋糕15上进行模拟裱花。第一机械臂5的末端能够安装柔性夹爪工具511实现对茶杯3、茶叶等物品的夹取,第一机械臂5的末端还可以安装裱花笔512,实现在模拟蛋糕15上模拟裱花。
33.另一方面,用于教学的协作机器人智能水吧还包括送餐机器人7,送餐机器人7包括移动平台71和设置在移动平台71上的第二机械臂72,第二机械臂72的末端安装有机械手721,移动平台71能够运动至吧台1的一侧,且机械手721能够从u型缺口111处夹紧托盘6,u型缺口111的设置使得机械手721能够更加方便的夹取托盘6。其中,第二机械臂7同样可以为六轴机械臂。移动平台71可以为agv小车,agv小车能够沿规定的导航路径行驶,从而实现第二机械臂72能够完成自动取餐和自动送餐的效果,达到送餐机器人7和第一机械臂5之间的协作工作,服务场景更复杂,可以完成更加复杂的教学与考核。
34.在优选的实施方案中,饮水机2上设置有多个出水口和用于控制出水口的按钮,出水口与按钮对应。其中,出水口中包括咖啡出口,吧台1上还设置有多个用于存放咖啡的咖啡杯8,对应的在视觉相机16的下方还放置有多块方糖,其中第一机械臂5能够与视觉相机16进行通信,在优选的实施方案中,裱花笔512上设置有吸盘,第一机械臂5能够在末端设置裱花笔512,并通过裱花笔512上的吸盘将方糖吸取并转运至咖啡杯8中,实现咖啡的加糖操作,丰富了教学与考核内容,在此实施例中裱花笔512不仅能够进行模拟裱花的工作,还能通过自身携带的吸盘完成对咖啡糖的吸取,实现一种工具的多用途使用。
35.此外,用于教学的协作机器人智能水吧还包括自动售卖机9,自动售卖机9安装在工作面板11上,第一机械臂5能够通过末端工具51夹取自动售卖机9中的物品并将自动售卖机9中的物品放置在托盘6上。通过设置自动售卖机9,丰富了第一机械臂5的功能,使得本实用新型用于教学的协作机器人智能水吧能够适用于更多的场景,教学内容丰富。
36.最后,实施例1:如图5所示,用于教学的协作机器人智能水吧还包括菜单切换组件17,菜单切换组件17包括切换控制电机172和至少三块显示板171,显示板171依次连接形成棱柱,棱柱转动安装在吧台上,且棱柱位于工作面板的上方,切换控制电机172固定安装在吧台上,且切换控制电机172的输出轴与棱柱固定连接。在本实施例中若显示板171为三块,则显示板171依次连接形成三棱柱,三棱柱的每个侧面就为一块显示板171,显示板171上用于显示菜单,通过切换控制电机172带动三棱柱旋转即可将每块显示板171上的内容循环显示,且切换控制电机172可以为步进电机,这样既能够训练学员对于步进电机的控制,又能够贴合实际生活,达到循环显示的效果,使得教学和生活实际场景相结合。同样的道理,显示板还可以为四块、五块或者更多。
37.需要理解的是,以上对本实用新型的具体实施例进行的描述只是为了说明本实用新型的技术路线和特点,其目的在于让本领域内的技术人员能够了解本实用新型的内容并据以实施,但本实用新型并不限于上述特定实施方式。凡是在本实用新型权利要求的范围内做出的各种变化或修饰,都应涵盖在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。