1.本技术涉及矿山生产安全教学技术领域,具体公开了一种虚拟智能矿山教学平台。
背景技术:
2.虚拟智能矿山系统指的是以真实的矿井、油气生产场所等为原型,运用 vr技术搭建一座全方面领先的虚拟智能矿山,它集“采、掘、机、运、通”等各方信息为一体,同时实现可视化空间融合与交互,对真实矿井及相关现象进行统一认知、表达与虚拟化仿真再现,实现在统一的时间与空间参照下,通过三维可视化表达获取异质、异构、多维、动态的矿井生产数据,并在其中进行教学工作,以此来提高遇险学员快速反应、避灾逃生的技能,从而在灾害发生时最大程度减少人员伤亡,该系统对遇险人员的紧急逃生及快速自救具有重要的意义。
3.在使用虚拟智能矿山系统进行教学工作时,学员往往借助vr眼镜在虚拟智能矿山显示屏前,身临其境的完成教学工作,目前学员往往是在地平面进行学习,但是在这样的环境中学习学员往往会感觉在观看电影,没有真实的体验,这样的情况往往记忆点不勾深刻,学习效果比较低,因此,发明人有鉴于此,提供了一种虚拟智能矿山教学平台,以便解决上述问题。
技术实现要素:
4.本实用新型的目的在于解决在利用虚拟智能矿山系统进行安全教学时,学员学习效果较低的问题。
5.为了达到上述目的,本实用新型的基础方案提供一种虚拟智能矿山教学平台,包括基座以及设置在基座内的功能板,基座内底面均布固接有若干支撑套,支撑套内均滑动设有支杆,支撑杆的自由端与功能板的内顶面转动连接,功能板上表面设有传送带以及控制传送带转动的第一电机,基座内底面设有第二电机,第二电机上同轴连接有丝杆,功能板下表面转动设有与丝杆螺纹连接的调节套;
6.基座一侧设有导向轨,导向轨内滑动设有导向杆,导向杆的自由端转动设有移动轮,导向杆内设有用于控制移动轮的第三电机,导向杆上安装有显示屏,第二电机位于导向轨一侧;
7.还包括pcl控制器,plc控制器分别与第一电机、第二电机以及第三电机电连接,plc控制器还与虚拟智能矿山系统电连接。
8.本基础方案的原理及效果在于:
9.1、在需要使用虚拟智能矿山系统进行学习时,需要先佩戴好vr眼镜,然后站在传送带上进行,打开显示屏,便可进行模拟矿山工作,学习各种工作技能以及应急逃生技能。
10.2、在进行学习时,plc控制器可根据此时的学习环境,调整不同的运行状态;其中第一电机控制传送带的运行速率,控制学习者的步伐,真实模拟在矿井内的运动情况;第二
电机控制丝杆与调节套之间的相对距离,以此来控制功能板的倾斜角度,能具体模拟出在矿山内是进行爬坡运动、水平运动以及下坡运动;第三电机工作,带动移动轮转动,此时便可控制显示屏与学员之间的具体距离,增加动态体验效果,能更真实磨练矿井内部的效果。
11.与现有技术相比,本平台不仅可以为学员提供正常的视觉模拟学习,同时也在学习过程模拟出矿井内的真实情况,提高了学员的体感体验,增加了学员的学习记忆点,有效提高了学员的学效果。
12.进一步,所述导向杆上固接有伸缩套,伸缩套内滑动设有伸缩杆,显示屏安装在伸缩杆的自由端,伸缩套一侧设有用于锁紧伸缩杆的锁紧件。根据不同的学员,利用伸缩套以及伸缩杆来调整显示屏的具体高度,提高了实用范围。
13.进一步,所述基座背离导向轨一侧设有辅助楼梯。辅助楼梯便于学员能正常踏入本装置。
14.进一步,所述基座表面固接有防摔栏。防摔栏能有效保护学员在学习过程中从本平台上摔倒。
15.进一步,所述基座下表面设有防胶垫。防胶垫能增大基座的摩擦系数,防止其在使用时与地面产生滑动。
16.进一步,所述锁紧件为蝴蝶螺钉。蝴蝶螺钉能方便学员调整伸缩杆。
附图说明
17.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
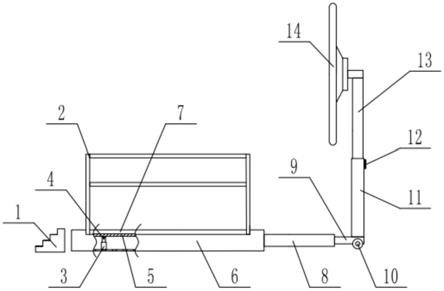
18.图1示出了本技术实施例提出的一种虚拟智能矿山教学平台的正视图;
19.图2示出了本技术实施例提出的一种虚拟智能矿山教学平台的局部俯视图;
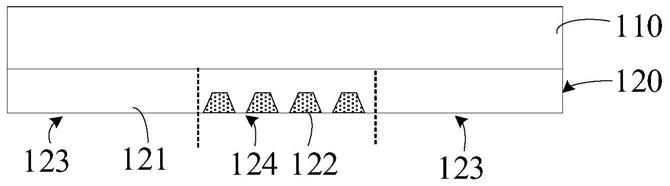
20.图3示出了本技术实施例提出的一种虚拟智能矿山教学平台中基座的俯剖视图;
21.图4示出了本技术实施例提出的一种虚拟智能矿山教学平台中支撑套的局部放大图。
具体实施方式
22.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
23.下面通过具体实施方式进一步详细的说明:
24.说明书附图中的附图标记包括:辅助楼梯1、防摔栏2、支撑套3、支杆 4、功能板5、基座6、传送带7、导向轨8、导向杆9、移动轮10、伸缩套 11、蝴蝶螺钉12、伸缩杆13、显示屏14、第二电机15、丝杆16。
25.一种虚拟智能矿山教学平台,实施例如图3所示,基座6内焊接了四个支撑套3,基座6右侧还安装了一个第二电机15,第二电机15通过联轴器与一个丝杆16同轴连接,如图4
所示,支撑套3内均滑动设置了一个支杆4,支杆4的上端均与功能板5的下表面转动连接,功能板5下表面还转动设置了一个与丝杆16螺纹连接的调节套。
26.如图1和图2所示,基座6表面固接有防摔栏2,基座6左侧放置了一个辅助楼梯1,如图1所示基座6下表面设有防胶垫,功能板5上表面设置了一个传送带7以及一个控制传送带7转动的第一电机,基座6右侧壁焊接了一个导向轨8,导向杆9滑动设置在导向轨8内内,导向杆9的右端安装了一组移动轮 10,导向杆9内设有用于控制移动轮10的第三电机,导向杆9右端上表面焊接了一个伸缩套11,伸缩杆13滑动设置在伸缩套11内,显示屏14通过显示屏14安装支架以及若干螺钉安装在伸缩杆13的顶端,伸缩套11右侧螺纹连接了一个用于锁紧伸缩杆13的锁紧件,锁紧件为蝴蝶螺钉12,pcl控制器,plc 控制器分别与第一电机、第二电机15以及第三电机电连接,plc控制器还与虚拟智能矿山系统电连接。
27.使用时,将第一电机、第二电机15、第三电机以及显示屏14连接好电源,然后便可投入使用。
28.学员通过辅助楼梯1踏传送带7,把一根安全带一端系在自己腰间,安全带的另一端系在防护栏上,带上vr眼镜,开启显示屏14,开启虚拟智能矿山系,开始进行模拟学习。
29.在学习过程中,第一电机控制传送带7的运行速率,控制学习者的步伐,真实模拟在矿井内的运动情况;第二电机15控制丝杆16与调节套之间的相对距离,以此来控制功能板5的倾斜角度,能具体模拟出在矿山内是进行爬坡运动、水平运动以及下坡运动;第三电机工作,带动移动轮10转动,此时便可控制显示屏14与学员之间的具体距离,增加动态体验效果,能更真实磨练矿井内部的效果。
30.本实用新型不仅可以为学员提供正常的视觉模拟学习,同时也在学习过程模拟出矿井内的真实情况,提高了学员的体感体验,增加了学员的学习记忆点,有效提高了学员的学效果。
31.最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不驱使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。