1.本发明涉及对风力涡轮机噪声进行掩蔽的方法、以及相关联的风力涡轮机系统。
背景技术:
2.在us8287228中公开了一种用于控制由风力涡轮机生成的噪声的幅度调制的方法。该方法包括:确定由风力涡轮机生成的涡轮机声波的声音特性;并且基于所述声音特性生成加性声波,从而产生峰
‑
峰幅度小于所述涡轮机声波的峰
‑
峰幅度并且平均声压电平大于涡轮机声波的平均声压电平的合成声波。加性声波的平均声压电平小于涡轮机声波的平均声压电平。
3.us8287228的方法的问题在于,如果涡轮机声波与加性声波之间的相位差不接近180度,则可能会产生相长干涉,这导致合成声波的峰
‑
峰幅度太高。这可能是由于确定涡轮机声波的相位时的误差(例如,由于来自另一声源的干扰)而发生的。涡轮机声波与加性声波之间的相位差也可能随位置的不同而变化,在某些位置为180
°
,而在其它位置则不是180
°
。
技术实现要素:
4.本发明的第一方面提供一种对来自风力涡轮机的风力涡轮机噪声进行掩蔽的方法,该方法包括:生成掩蔽噪声以产生合成噪声,该合成噪声的调制深度小于风力涡轮机噪声的调制深度并且该合成噪声的平均电平大于风力涡轮机噪声的平均电平。掩蔽噪声是具有基本恒定电平的未调制的掩蔽噪声,或者是相对于风力涡轮机噪声进行了相移并且调制深度小于风力涡轮机噪声的调制深度的经幅度调制的掩蔽噪声。
5.本发明的第二方面提供一种风力涡轮机系统,该风力涡轮机系统包括:风力涡轮机,该风力涡轮机被配置成生成风力涡轮机噪声;以及噪声生成器,该噪声生成器被配置成生成掩蔽噪声以产生合成噪声,该合成噪声的调制深度小于风力涡轮机噪声的调制深度和该合成噪声的平均电平大于风力涡轮机噪声的平均电平。噪声生成器被配置成将掩蔽噪声生成为具有基本恒定电平的未调制的掩蔽噪声,或者生成相对于风力涡轮机噪声进行了相移并且调制深度小于风力涡轮机噪声的调制深度的经幅度调制的掩蔽噪声。
6.本发明认识到,生成具有为零或相对低的调制深度(小于风力涡轮机噪声的调制深度)的掩蔽噪声使得不太可能引起相长干涉。
7.本文所述的各种噪声信号的调制深度和电平可以以db(a)或声压电平的等效单位为单位。即,合成噪声的调制深度可以小于风力涡轮机噪声的以db(a)或者声压电平的等效单位为单位的调制深度。类似地,合成噪声的平均电平可以大于风力涡轮机噪声的以db(a)或声压电平的等效单位为单位的平均电平。掩蔽噪声可以是具有以db(a)或者声压电平的等效单位为单位的基本恒定电平的未调制的掩蔽噪声。经幅度调制的掩蔽噪声的调制深度可以小于风力涡轮机噪声的以db(a)或者声压电平的等效单位为单位的调制深度。
8.可选地,掩蔽噪声是具有基本恒定电平的未调制的掩蔽噪声。这是有利的,因为它
不需要测量风力涡轮机噪声的相位,并且最小化或完全避免相长干涉的风险。
9.另选地,掩蔽噪声可以是相对于风力涡轮机噪声进行了相移并且调制深度小于风力涡轮机噪声的调制深度的经幅度调制的掩蔽噪声。该装置的优点是,与未调制的掩蔽噪声相比,可以通过平均电平的较低增加来实现调制深度的给定减小。
10.未调制的掩蔽噪声可能不始终具有基本恒定电平,而是可能具有变化以适应风速变化的电平。例如,未调制的掩蔽噪声在恒定风速的时间期间可以具有基本恒定电平,但是其电平可以在其它时间上下变化以适应风速的变化。
11.可选地,风力涡轮机噪声在一系列两个或更多个调制周期内被幅度调制,并且掩蔽噪声是在该一系列两个或更多个调制周期内具有基本恒定电平的未调制的掩蔽噪声。
12.可选地,风力涡轮机噪声在一系列波峰和波谷内被幅度调制,并且掩蔽噪声的平均电平大于风力涡轮机噪声的波谷。
13.可选地,掩蔽噪声的平均电平大于或等于风力涡轮机噪声的平均电平。
14.可选地,该方法还包括测量直接或间接指示风力涡轮机噪声的调制深度的参数;以及根据该参数控制掩蔽噪声的平均电平。
15.可选地,掩蔽噪声的平均电平根据该参数被控制,使得掩蔽噪声的平均电平大于或等于风力涡轮机噪声的平均电平。
16.该参数可以直接指示风力涡轮机噪声的调制深度
‑
例如,可以从直接测量风力涡轮机噪声的噪声计获得该参数。另选地,该参数可以间接地指示风力涡轮机噪声的调制深度
‑
例如,该参数可以是风速或者诸如功率或转子速度之类的风力涡轮机运行参数。在这种情况下,可以基于风速或风力涡轮机运行参数来估计风力涡轮机噪声的调制深度,例如使用查找表。
17.可选地,合成噪声具有小于或等于3db(a)的调制深度。
18.可选地,合成噪声具有大于2db(a)的调制深度。
19.可选地,合成噪声的平均电平比风力涡轮机噪声的平均电平大至少2db(a)或3db(a)。
20.可选地,掩蔽噪声是由扬声器生成的。
21.可选地,合成噪声在接收器处的调制深度小于风力涡轮机噪声在接收器处的调制深度,并且合成噪声在接收器处的平均电平大于风力涡轮机噪声在接收器处的平均电平。
22.可选地,掩蔽噪声是具有基本恒定电平的未调制的掩蔽噪声,或者是在接收器处相对于风力涡轮机噪声进行了相移并且在接收器处的调制深度小于风力涡轮机噪声在接收器处的调制深度的经幅度调制的掩蔽噪声。
23.可选地,掩蔽噪声由诸如扬声器的声音生成设备生成,并且掩蔽噪声是在声音生成设备处具有基本恒定电平的未调制的掩蔽噪声。在这种情况下,由于气象传输变化和来自接收器周围的对象的反射,未调制的掩蔽噪声在接收器处的电平可能会稍微变化,但是任何此类变化都将趋向于也影响风力涡轮机噪声,因此掩蔽效果不会受很大影响。
24.本发明的另一方面提供一种对来自风力涡轮机的风力涡轮机噪声进行掩蔽的方法,该方法包括:生成掩蔽噪声以产生合成噪声,该合成噪声的调制深度小于风力涡轮机噪声的调制深度和该合成噪声的平均电平大于风力涡轮机噪声的平均电平,其中,掩蔽噪声的平均电平大于风力涡轮机噪声的平均电平。
附图说明
25.现在将参考附图描述本发明的实施方式,其中:
26.图1示出了风力涡轮机系统;
27.图2是示出用于对来自风力涡轮机的风力涡轮机噪声进行掩蔽的装置的框图;
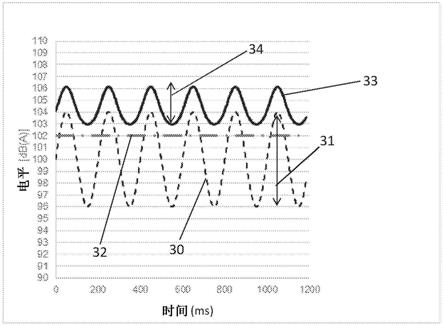
28.图3是示出在接收器处测量的风力涡轮机噪声、未调制的掩蔽噪声和合成噪声的声压电平的图表;以及
29.图4是示出在接收器处测量的风力涡轮机噪声、经幅度调制的掩蔽噪声和合成噪声的声压电平的图表。
具体实施方式
30.图1示出了包括水平轴风力涡轮机1的风力涡轮机系统。风力涡轮机1包括支撑机舱3的塔架2,转子4被安装至机舱3。转子4包括从中心轮毂5径向延伸的多个风力涡轮机叶片6。在该示例中,转子包括三个叶片6。
31.图2示出了用于对来自风力涡轮机1的风力涡轮机噪声进行掩蔽的装置。图2中的元件中的一些元件安装在风力涡轮机1上或附近,如图1所示。涡轮控制器20从传感器21接收一个或更多个测量信号,并且计算发送到计算单元25的一个或更多个相关联的参数。传感器21可以包括:安装在机舱3上的风传感器;测量风力涡轮机生成的功率的功率传感器;和/或测量转子4的速度的转子速度传感器。被发送到计算单元25的相关联的参数可以是风速(例如,以m/s为单位);或风力涡轮机的运行参数,诸如,功率(例如,以w为单位)或转子速度(例如,以每分钟的转数或每秒的弧度为单位)。
32.涡轮控制器20将参数传递到计算单元25,该计算单元25确定合适的掩蔽噪声信号,该掩蔽噪声信号被发送到掩蔽噪声生成器22。掩蔽噪声生成器22基于掩蔽噪声信号来生成放大器驱动信号,该放大器驱动信号被输入到放大器23中。放大器23基于掩蔽噪声信号利用扬声器驱动信号来驱动扬声器24。
33.涡轮机控制器20、计算单元25和掩蔽噪声生成器22可以是计算机或任何其它电子设备。涡轮机控制器20、计算单元25和掩蔽噪声生成器22可以被实现在不同的电子设备或相同的电子设备中。
34.元件20至25可以如图1所示安装到风力涡轮机1,或者与其唯一地关联。因此,例如,涡轮机控制器20、计算单元25、掩蔽噪声生成器22和放大器23可以被容纳在机舱3中、在塔架2中或与塔架2的基部相邻。在图1中示出了元件20至25的示例性位置,但是其它位置也是可能的。
35.风力涡轮机1可以是风电场中的风力涡轮机的集合中的一个。在这种情况下,风电场可以具有风电场控制器26,风电场控制器26从与风力涡轮机1相关联的传感器21以及与风电场中的其它风力涡轮机相关联的传感器接收测量信号。在这种情况下,可以通过风电场控制器26而不是涡轮机控制器20将参数输入到计算单元25。
36.扬声器24可以位于图1所示的各种位置,包括在地面上
‑
距塔架基部的最佳高度和距离
‑
如图1所示。扬声器的其它定位选项也是可能的,包括:机舱的上方或顶部,如在24a处所示;机舱下方或从机舱悬挂,如在24b处所示;机舱内部
‑
通过开口进行辐射或可能作为使用机舱壁作为噪声辐射表面的致动器,如在24c处所示;在塔架上的任何高度上,如在24d处
所示;或在塔架内部
‑
可能作为使用塔架壁作为噪声辐射表面的致动器
‑
如在24e处所示。
37.优选地,扬声器24是全向的,以使得它在所有方位角上近似均等地辐射声音。
38.图3是示出在图1所示的接收器29(诸如,声音计)处测得的以db(a)为单位的声压电平的图表,该接收器29被定位在诸如风电场的边界或邻近所有物的边界的合适位置处。
39.风力涡轮机1生成在接收器29处的经幅度调制的风力涡轮机噪声30,该经幅度调制的风力涡轮机噪声是由叶片6的旋转引起的,并且可以被听到为“嗖嗖”的声音。风力涡轮机噪声30的平均电平以及风力涡轮机噪声30的幅度调制的频率和调制深度将取决于叶片6的旋转速率以及诸如叶片的俯仰角、风向等的空气动力学因素。在该示例中,风力涡轮机噪声的幅度调制的频率约为5hz。
40.规则不仅考虑了接收器29处的风力涡轮机噪声30的平均电平,而且还考虑了其峰
‑
峰高度方面的调制深度。例如,如果调制深度大于3db(a),则可能会产生损失。该损失被表示为6db(a)的损失。因此,该规则将6db(a)的损失添加至平均电平,并且如果总和超过阈值,则认为风力涡轮机噪声高于法定限制。
41.为了减小风力涡轮机噪声30的调制深度,扬声器24可以被驱动以在接收器29处产生未调制的掩蔽噪声32,如图3所示。风力涡轮机噪声30和掩蔽噪声32相加地组合,以产生在接收器29处的合成噪声33。
42.以下表1列出了图3的各个噪声信号在接收器29处的平均声压电平和调制深度。
43.表1
[0044] 平均电平(db(a))调制深度(db(a))风力涡轮机噪声1008未调制的掩蔽噪声1020合成噪声104.53
[0045]
合成噪声33在接收器29处可以具有调制深度(3db(a)),如图3中的峰
‑
峰高度34所示,该调制深度小于风力涡轮机噪声在接收器处的调制深度(8db(a)),如峰
‑
峰高度31所示。合成噪声33在接收器29处还可以具有平均电平(104.5db(a)),该平均电平大于风力涡轮机噪声的平均电平(100db(a))。
[0046]
未调制的掩蔽噪声32的平均电平由计算单元25和掩蔽噪声生成器22控制,以确保合成噪声33在接收器29处的调制深度34被减小到期望电平,例如如图3所示的3db(a)。该控制可以通过以下方法来实现。
[0047]
传感器21提供输出,该输出间接地指示风力涡轮机噪声30在接收器29处的平均电平和调制深度,并且可以被分析以推断出这些特性。因此,例如,传感器21可以包括安装在机舱3上的风传感器。较高的风速将导致具有较高平均电平和调制深度的风力涡轮机噪声。这些参数之间的关系可以由传感器21和接收器29测量,然后存储在查找表中,因此对于给定风速,查找表输出风力涡轮机噪声30在接收器29处的估计平均电平和调制深度。类似原理可以用于基于测量风力涡轮机生成的功率的功率传感器或测量转子4的速度的转子速度传感器的输出来估计风力涡轮机噪声30在接收器29处的平均电平和调制深度31。
[0048]
掩蔽噪声生成器22分析从涡轮控制器20接收的参数,基于这些参数估计风力涡轮机噪声30在接收器29处的平均电平和调制深度31,并且相应地设置掩蔽噪声32的平均电平,使得合成噪声33的调制深度34被减小到可接受电平。
[0049]
在图3的示例中,未调制的掩蔽噪声32的平均电平(102db(a))被设置成比风力涡轮机噪声30的平均电平(100db(a))大2db(a)。这确保了将合成噪声33的调制深度34减小到3db(a),以避免在规定下的损失。
[0050]
合成噪声33的平均电平(104.5db(a))比风力涡轮机噪声30的平均电平(100db(a))大4.5db(a),但是这小于在调制深度没有从8db(a)降低到3db(a)时产生的6db(a)的损失。
[0051]
另选地,如果合成噪声33的较高调制深度34是可接受的,则未调制的掩蔽噪声32的平均电平可以被设置成等于或小于风力涡轮机噪声30的平均电平。
[0052]
如果未调制的掩蔽噪声32的平均电平与图3相比降低,那么通常它会保持大于风轮机噪声30的波谷处的电平,换句话说,在本示例中大于96db(a)。
[0053]
未调制的掩蔽噪声32的平均电平与图3相比也可能增加。这将增加合成噪声的平均电平,但也将其调制深度降低到3db(a)以下。
[0054]
由计算单元25输出的掩蔽噪声信号具有以db(a)为单位的基本恒定电平,输入到扬声器24的扬声器驱动信号和在扬声器24处的掩蔽噪声的以db(a)为单位的声压电平也是如此。因此,如图3所示,未调制的掩蔽噪声32在接收器29处测量的电平可以是基本恒定的,尽管由于测量误差、反射或其它伪影,在接收器29处测量的未调制的掩蔽噪声32的电平可以稍微变化(例如,1db(a)至2db(a))。1db(a)量级的变化可能是由气象传输变化引起的,而2db(a)量级的变化可能是由于接收器29周围的对象的反射引起的。这种反射很可能也会以相同的程度影响经幅度调制的风力涡轮机噪声30,因此在接收器处的风力涡轮机噪声30与在接收器处的掩蔽噪声32之间的相对差值不会改变,并且掩蔽效果不会受很大影响。无论如何,在接收器29处测量的未调制的掩蔽噪声32的电平的任何小变化都将小于风力涡轮机噪声30在接收器处的调制深度31。
[0055]
风力涡轮机噪声30在一系列调制周期内被幅度调制,在图3中示出了五个完整的调制周期。在图3所示的一系列调制周期中,未调制的掩蔽噪声32具有102db(a)的基本恒定电平,但是其电平可以在随后的时间缓慢增大或减小以适应风速的变化。
[0056]
风的变化将引起未调制的掩蔽噪声32在接收器29处的电平的相关变化。这样的变化将在几分钟的时间尺度上发生,而在幅度调制的较短时间尺度上,未调制的掩蔽噪声32在接收器29处的电平可以被认为是准静态的。换句话说,在例如经幅度调制的风力涡轮机噪声的两个调制周期(在图3的情况下约为0.4秒)的时间尺度内,未调制的掩蔽噪声32在接收器29处的电平可能仅有最小变化(不大于0.1db(a))。
[0057]
图4是示出在另选实施方式中在接收器29处测量的以db(a)为单位的声压电平的图表。在这种情况下,掩蔽噪声是经幅度调制的掩蔽噪声32a,该经幅度调制的掩蔽噪声32a相对于风力涡轮机噪声30进行了相移并且具有如峰
‑
峰高度35所示的调制深度。
[0058]
以下表2列出了图4的各个噪声信号在接收器29处的平均声压电平和调制深度。
[0059]
表2
[0060] 平均电平(db(a))调制深度(db(a))风力涡轮机噪声1008经调制的掩蔽噪声1014合成噪声103.83.2
[0061]
合成噪声33具有调制深度(3.2db(a))(如图4中的峰
‑
峰高度34a所示),该调制深度小于风力涡轮机噪声30的调制深度(8db(a))(如峰
‑
峰高度31所示的)。合成噪声33还具有大于风力涡轮机噪声的平均电平(100db(a))的平均电平(103.8db(a))。
[0062]
经调制的掩蔽噪声32a具有相对低的调制深度(4db(a))(如图4中的峰
‑
峰高度35所示),小于风力涡轮机噪声30的调制深度(8db(a))。经调制的掩蔽噪声32a的相对低调制深度确保了任何相长干涉都保持相对低。而且,经调制的掩蔽噪声32a的相对低调制深度35使得其对相移的不准确不敏感。理想地,经调制的掩蔽噪声32a相对于风力涡轮机噪声30相移180
°
,换句话说,噪声信号为精确反相。图4示出了经调制的掩蔽噪声32a,其不处于与风力涡轮机噪声30精确反相的相位(而是相移了125
°
),但是其将合成噪声33a的调制深度34a减小到可接受电平。
[0063]
使用图4的经幅度调制的掩蔽噪声32a的优点是,与图3所示的未调制的掩蔽噪声相比,可以通过平均电平的较低增加来实现调制深度的给定减小。
[0064]
掩蔽噪声32或32a可以是宽带白噪声,但是更优选地,其仅跨越与风力涡轮机噪声30的频率范围匹配的有限频率范围。例如,掩蔽噪声32或32a可以被限制在100hz至400hz或200hz至500hz的频率范围内。这使得最小化必须产生的声音能量的量。
[0065]
尽管上面已经参考一个或更多个优选实施方式描述了本发明,但是一个实施方式的特征可以应用于其它实施方式,并且应当理解,可以在不脱离所附权利要求限定的本发明的范围的情况下进行各种改变或修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

