1.本公开属于轨道机器人控制技术领域,尤其涉及一种轨道机器人语音交互装置及方法。
背景技术:
2.本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
3.语音识别技术经过数十年的发展,已经从实验室走向市场并崭露头角,其识别算法和识别效果越来越完善,用户的体验也越来越好。伴随着计算机技术语音识别进入了更广阔的领域,如工业、家电、消费电子产品等,大大提高的技术的灵活性和多样性。
4.市面上很多电子产品配有语音识别功能,如通过手机的麦克风来控制设备运行,但这种方式成本极高,而且由于手机麦克风特性只适合靠近说话,无法实现有效的远距离语音识别;另外有的产品虽然对特定和非特定人声均可识别,但是非特定人声需要大量训练,或需要大容量本地存储装置,或需要联网至云台进行算法处理,且识别算法与逻辑实现困难,无法规避硬件成本高、无平台网络环境、训练成本高等。
5.电力线缆是电能输送的大动脉,也是电力部门的重要资产,其运行状态关系着生产安全和生活质量,所以必须采用必要的手段对电缆进行监控,防患未然。由于很多高压电缆采用地线隧道形式走线,电缆隧道十分狭长,常规的人力巡检费时费力,所以现在很多隧道都采用轨道机器人的方式来巡检线缆,这种方式效率更高更可靠。
6.轨道机器人布置于专用轨道上,用户可以通过无线方式来对机器人进行控制,但由于隧道内环境一般较为恶劣,无线通信质量不佳,还需要人员必须手持电脑来操作;另一方面机器人故障停机可能恰好发生在距地面较高的地段,在无电脑设备的情况下通过人员使机器人故障脱离危险而麻烦。
技术实现要素:
7.为克服上述现有技术的不足,本公开提供了一种轨道机器人语音交互装置,能够提高隧道现场调测的便捷性。
8.为实现上述目的,本公开的一个或多个实施例提供了如下技术方案:
9.第一方面,公开了一种轨道机器人语音交互装置,包括:
10.主控模块、语音识别模块及语音合成模块;
11.所述语音识别模块基于设置完成的关键词列表给出与语音口令匹配程度最高的结果;
12.所述语音合成模块对所述语音识别模块识别出的结果进行合成;
13.所述主控模块处理来自语音合成模块的语音请求,对语音合成模块进行控制,使其产生相应的语句,并将语音请求结果提交给轨道机器人。
14.进一步的技术方案,所述语音识别模块采用非特定人声asr识别技术,不需要进行
特定人声的训练。
15.进一步的技术方案,所述语音识别模块具有本地离线识别功能,无需联网和云平台参与计算。
16.进一步的技术方案,所述轨道机器人语音交互装置安装于轨道巡检机器人腹部位置,在轨道巡检机器人的麦克风和喇叭位置均开有过音孔,便于声音的传递。
17.进一步的技术方案,所述语音识别模块带有硬件滤波降噪功能,对麦克风和环境的底噪进行过滤,只保留有效的人声信号。
18.进一步的技术方案,还包括语音播报模块,用于播报机器人的运行状态信息、环境物理量信息,并对语音输入进行应答,实现了的人机交互功能。
19.进一步的技术方案,所述语音识别模块需要先通过唤醒口令唤醒。
20.进一步的技术方案,所述主控模块采取状态机过滤的方式对识别结果进行过滤,只提取出符合机器人当前状态的识别结果。
21.第二方面,公开了一种轨道机器人语音交互方法,包括:
22.基于设置完成的关键词列表给出与语音口令匹配程度最高的结果;
23.对识别出的结果进行合成;
24.处理来自合成的语音请求,使产生相应的语句,并将语音请求结果提交给轨道机器人。
25.第三方面,公开了一种轨道机器人,安装有上述一种轨道机器人语音交互装置。
26.以上一个或多个技术方案存在以下有益效果:
27.为提高语音识别的识别距离和降低误识别率,本公开技术方案在硬件上采用高质量高灵敏度低噪声的麦克风,在电路前级对麦克风输出的模拟信号进行带通滤波,降低了环境底噪对语音识别效果的影响。
28.该电路前级为滤波电路,该电路输出信号作为语音识别模块的输入信号。
29.为降低语音识别的误触发率,本公开技术方案在语音识别模块软件上采用唤醒口令 应用词汇的方式,用户必须先通过唤醒口令唤醒语音识别模块。另外还采取主控模块状态机过滤的方式对识别结果进行过滤,根据机器人当前状态,将异常状态剔除,只保留可允许的操作指令,只提取出符合机器人当前状态的识别结果,进一步提高了系统安全性。
30.通过本发明的实施,可以使用户方便灵活、随时随地的操作轨道机器人,大大提高了隧道现场调测的便捷性。
31.本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
32.构成本公开的一部分的说明书附图用来提供对本公开的进一步理解,本公开的示意性实施例及其说明用于解释本公开,并不构成对本公开的不当限定。
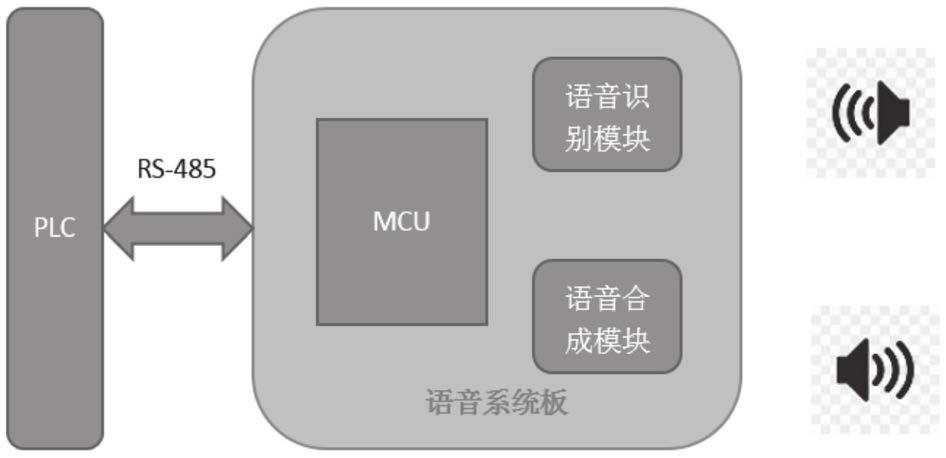
33.图1为本公开实施例装置框图。
具体实施方式
34.应该指出,以下详细说明都是示例性的,旨在对本公开提供进一步的说明。除非另
有指明,本文使用的所有技术和科学术语具有与本公开所属技术领域的普通技术人员通常理解的相同含义。
35.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本公开的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
36.在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。
37.实施例一
38.本实施例公开了一种轨道机器人语音交互装置,参见附图1所述,由主控mcu、语音识别模块、语音合成模块组成。
39.主控mcu负责处理来自语音合成模块的语音请求,并将语音请求结果提交给机器人的plc通信单元;主控mcu可以对语音合成模块进行控制,使其产生相应的语句。在该实施例中,语音合成模块只播报语音,相当于执行器。
40.语音识别模块采用非特定人声asr识别技术,不需要对模块进行特定人声的训练,使用者只要会说普通话即可;语音识别模块具有本地离线识别功能,无需联网和云平台参与计算,用户可以根据实际应用自由的设置好关键词列表,识别模块根据设定的关键词列表来给出与语音口令匹配程度(打分制)最高的结果。
41.关键词列表中包括的关键词,例如可以为:电池状态、温湿度、气体浓度、当前位置、当前速度、异常检测、接头温度、开前灯、关前灯、开后灯、关后灯、执行自检、开始巡检、停止巡检。
42.语音播报模块相当于一个执行器,与主控模块通过串口相连接,其作用是播报机器人的运行状态信息、环境物理量信息,并可以对语音输入进行应答,生动的实现了的人机交互功能。
43.该装置无需进行特定人声训练,无需连接云平台,直接可以实现本地非特定人声语音识别功能,可以使用户方便灵活、随时随地的操作轨道机器人,大大提高了隧道现场调测的便捷性。
44.该装置可以使用户方便灵活、随时随地的操作轨道机器人。
45.该装置安装于轨道巡检机器人腹部位置,在麦克风和喇叭位置均开有过音孔,便于声音的传递。装置采用高灵敏度低噪声麦克风,增加对远距离声音的识别效果,语音识别模块带有硬件滤波降噪功能,可以对麦克风和环境的底噪进行过滤,只保留有效的人声信号。
46.实施例二
47.本实施例的目的是提供
48.一种轨道机器人语音交互方法如下:
49.1.语音系统上电后,语音播报模块会自动播报提示信息,提醒用户系统已经准备好。
50.2.用户输入唤醒口令,语音播报模块应答收到。
51.3.用户输入应用词汇,根据识别结果机器人执行相关操作,语音播报模块播报相关结果。
52.4.30s内无语音输入超时退出,语音识别模块进入休眠状态。
53.为提高语音识别的识别距离和降低误识别率,系统在硬件上采用高质量高灵敏度低噪声的麦克风,在电路前级对麦克风输出的模拟信号进行带通滤波,降低了环境底噪对语音识别效果的影响。
54.为降低语音识别的误触发率,系统在软件上采用唤醒口令 应用词汇的方式,用户必须先通过唤醒口令唤醒语音识别模块。另外还采取状态机过滤的方式对识别结果进行过滤,只提取出符合机器人当前状态的识别结果,进一步提高了系统安全性。
55.本领域技术人员应该明白,上述本公开的各模块或各步骤可以用通用的计算机装置来实现,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在存储装置中由计算装置来执行,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。本公开不限制于任何特定的硬件和软件的结合。
56.以上所述仅为本公开的优选实施例而已,并不用于限制本公开,对于本领域的技术人员来说,本公开可以有各种更改和变化。凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
57.上述虽然结合附图对本公开的具体实施方式进行了描述,但并非对本公开保护范围的限制,所属领域技术人员应该明白,在本公开的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本公开的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

