1.本公开涉及电动车辆的再生制动控制装置。
背景技术:
2.日本特开2005
‑
253157公开了通过利用车轮的旋转能量来驱动发电机而进行制动的再生制动控制装置。在该再生制动控制装置中,根据由路面摩擦系数推定机构推定的路面摩擦系数,使再生制动的开始时点的减速度的上升斜度变化。在路面摩擦系数小的路面(低μ路)中,减小再生制动开始时点的减速度的上升斜度,使制动初期的减速度平缓地增大。由此,抑制制动转矩急剧增大而以低的减速度产生滑移的情况,在实现比较高的减速度之前避免滑移产生。
技术实现要素:
3.日本特开2005
‑
253157公开的再生制动装置在低μ路上,减小再生制动开始时点的减速度的上升斜度,因此能抑制滑移的产生,但是与路面摩擦系数大的路面(高μ路)上的再生制动时相比,驾驶者感觉到的减速感变小,可能会给驾驶者带来违和感。
4.本公开的目的在于提供一种在低μ路上能抑制滑移的产生并且对低μ路与高μ路上的减速感的变化难以产生违和感的电动车辆的再生制动控制装置。
5.本公开的电动车辆的再生制动装置是具备行驶用的旋转电机的电动车辆的再生制动控制装置,具备:路面摩擦系数取得部,所述路面摩擦系数取得部取得路面摩擦系数;及再生转矩控制部,所述再生转矩控制部在电动车辆的减速时控制旋转电机的再生转矩。再生转矩控制部构成为,在路面摩擦系数取得部取得的路面摩擦系数小的情况下,与路面摩擦系数大的情况相比,减小再生转矩,并增大再生开始时的再生转矩的上升斜度。
6.根据该结构,再生转矩控制部在路面摩擦系数取得部取得的路面摩擦系数小的情况下,与路面摩擦系数大的情况相比,减小再生转矩,并增大再生开始时的再生转矩的上升斜度。在路面摩擦系数小(低μ路)的情况下,与路面摩擦系数大(高μ路)的情况相比,减速时的再生转矩减小,因此能够抑制低μ路上的滑移的产生。而且,在低μ路上,即使减小减速时的再生转矩,由于增大再生开始时的再生转矩的上升斜度,因此电动车辆的减速度的上升也变快,能够增大驾驶者感觉到的减速感,能够抑制低μ路与高μ路的减速感的变化,能够难以感觉到违和感。
7.再生转矩控制部可以构成为,控制再生转矩的上升斜度及再生转矩的大小,以使基于再生转矩的电动车辆的减速度的最大值在路面摩擦系数小时与路面摩擦系数大时为相同的值。
8.根据该结构,由于控制再生转矩的上升斜度及再生转矩的大小,以使基于再生转矩的电动车辆的减速度的最大值在路面摩擦系数小时与路面摩擦系数大时为相同的值,因此能够进一步抑制驾驶者感觉到的低μ路与高μ路的减速感的变化。
9.电动车辆可以是具备内燃机的混合动力车辆,电动车辆构成为,在规定的状态下,
在电动车辆的减速时,不执行旋转电机的再生,而是使用内燃机的阻力产生的制动力来进行减速。上述的再生转矩控制部可以构成为,控制再生转矩的上升斜度及再生转矩的大小,以使基于再生转矩的电动车辆的减速度的最大值成为未进行旋转电机的再生时的电动车辆的减速度的最大值。
10.根据该结构,由混合动力车构成的电动车辆在减速时不执行旋转电机的再生的情况下,通过内燃机的阻力产生的制动力(发动机制动器)使电动车辆减速。并且,控制再生转矩的上升斜度及再生转矩的大小,以使基于再生转矩的电动车辆的减速度的最大值无论路面摩擦系数如何都成为基于发动机制动器的减速度的最大值,因此能够进一步抑制驾驶者感觉到的低μ路与高μ路的减速感的变化,并且也能够抑制与未进行基于再生转矩的减速的情况下感觉到的减速感的差异。
11.路面摩擦系数取得部可以在外部空气温度低时,推定为路面摩擦系数小。例如,在外部空气温度低至路面冻结那样的情况下,推定为路面摩擦系数小(低μ路)。
12.根据该结构,能够比较简便地取得路面摩擦系数。电动车辆可以为后轮驱动。
13.在车辆的减速时,通常前轮载荷增加而后轮载荷减少。因此,在电动车辆为后轮驱动的情况下,由于基于再生转矩的减速而使后轮成为容易抱死的倾向,但是通过将上述各结构应用于后轮驱动的电动车辆,能恰当地抑制基于再生转矩的后轮的抱死。
14.根据本公开,能够提供一种在低μ路上能抑制滑移的产生,并且对于低μ路与高μ路上的减速感的变化难以产生违和感的电动车辆的再生制动控制装置。
附图说明
15.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,附图中相似的数字表示相似的元件,其中:
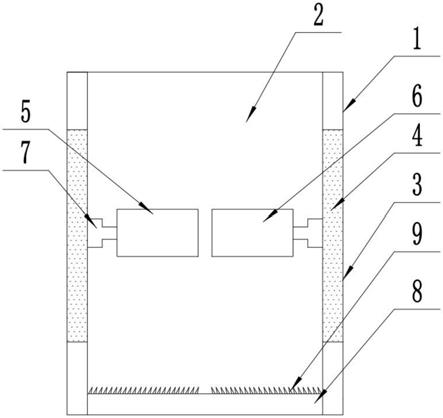
16.图1是具备本实施方式的再生制动控制装置的电动车辆1的整体结构图。
17.图2是本实施方式的hv
‑
ecu100的功能框图。
18.图3是表示用于算出mg60的再生转矩的映射的图。
19.图4是表示通过hv
‑
ecu100的再生转矩控制部102处理的顺序的流程图。
20.图5是表示电动车辆1的减速时的减速度的图。
21.图6是说明变形例的电动车辆200的图。
具体实施方式
22.以下,关于本公开的实施方式,参照附图进行详细说明。需要说明的是,对图中相同或相当部分标注同一附图标记而不重复其说明。
23.图1是表示具备本实施方式的制动控制装置的电动车辆1的整体结构的图。电动车辆1是具备内燃机10的混合动力车辆。电动车辆1具备内燃机10、变矩器20、自动变速器30。
24.内燃机10例如是火花点火式内燃机或压缩引燃式内燃机,内燃机10的输出轴与变矩器20的输入轴连接。变矩器20是带有锁止离合器的变矩器,具备未图示的泵叶轮、涡轮转子、定子及锁止离合器。在与变矩器20的输入轴连接的泵叶轮和与变矩器20的输出轴连接的涡轮转子之间进行转矩放大,将内燃机10的输出向自动变速器30传递。变矩器20的锁止离合器(未图示)被控制成卡合状态、释放状态、滑移(半卡合)状态中的任一状态。当锁止离
合器成为卡合状态时,变矩器20的输入轴与输出轴成为直接连结状态,输入轴与输出轴一体旋转。
25.变矩器20的输出轴与自动变速器30的输入轴连接。自动变速器30是行星齿轮式的多级自动变速器,通过控制多个摩擦卡合元件的卡合及释放的组合来实现各变速级。自动变速器30的输出轴经由传动轴连接于差动齿轮40。差动齿轮40经由驱动轴连接于作为驱动轮的后轮50。电动车辆1是将从内燃机10输出的输出转矩(驱动转矩)经由变矩器20、自动变速器30及差动齿轮40向后轮50传递的后轮驱动车。
26.电动车辆1具备电动发电机(以下称为“mg”。)60。mg60是旋转电机,例如是在转子埋入有永久磁铁的ipm(interior permanent magnet,内嵌永久磁铁)同步电动机。mg60的输出轴(转子轴)经由带61连接于内燃机10的曲轴。在mg60作为电动机进行动作时,mg60的输出转矩经由内燃机10的曲轴,对作为驱动轮的后轮50进行驱动。而且,当经由内燃机10的曲轴来驱动mg60时,mg60作为发电机而工作。
27.pcu(power control unit,电源控制单元)70将从蓄电装置80接受的直流电力转换成用于驱动mg60的交流电力。而且,pcu70将由mg60发电的交流电力转换成对蓄电装置80进行充电用的直流电力。pcu70例如包括逆变器和将向逆变器供给的直流电压升压为蓄电装置80的电压以上的转换器而构成。
28.蓄电装置80是能够再充电的直流电源,例如包括锂离子电池或镍氢电池等二次电池而构成。例如,可以使用48v的锂离子电池作为蓄电装置80。蓄电装置80接受mg60发电的电力而被充电。并且,蓄电装置80将其蓄积的电力向pcu70供给,来驱动mg60。
29.在蓄电装置80设有监视单元81。监视单元81包括分别检测蓄电装置80的电压、输入输出电流及温度的电压传感器、电流传感器及温度传感器(均未图示)。监视单元81将各传感器的检测值(蓄电装置80的电压、输入输出电流及温度)向bat
‑
ecu110输出。
30.电动车辆1具备e/g
‑
ecu(electronic control unit,电子控制单元)90、hv
‑
ecu100、bat
‑
ecu110、加速器开度传感器120、外部空气温度传感器130、以及各种传感器140。各ecu包括未图示的cpu(central processing unit,中央处理单元)、存储器及输入输出缓存,进行来自各种传感器等的信号的输入、向各设备的控制信号的输出,并进行各设备的控制。
31.bat
‑
ecu110基于从监视单元81输出的各传感器的检测值,算出蓄电装置80的soc(state of charge,荷电状态),向hv
‑
ecu100输出。hv
‑
ecu100将用于控制内燃机10及变矩器20的指令向e/g
‑
ecu90输出,并将用于控制mg60的指令向pcu70输出。需要说明的是,hv
‑
ecu100相当于本公开中的“再生制动控制装置”。
32.e/g
‑
ecu90基于hv
‑
ecu100的指令,控制内燃机10的输出,并控制变矩器20的锁止离合器的卡合状态(滑移状态)。pcu70按照hv
‑
ecu100的指令被控制,由此mg60被控制成动力运转状态(驱动状态)或再生状态(发电状态)。
33.加速器开度传感器120检测加速踏板的踏入量。需要说明的是,也可以取代加速器开度传感器120而是检测内燃机10的节气门开度的节气门开度传感器。外部空气温度传感器130检测电动车辆1的周围的外部空气温度。而且,各种传感器140包括检测车速的车速传感器、检测制动踏板的踏入量的制动传感器等。
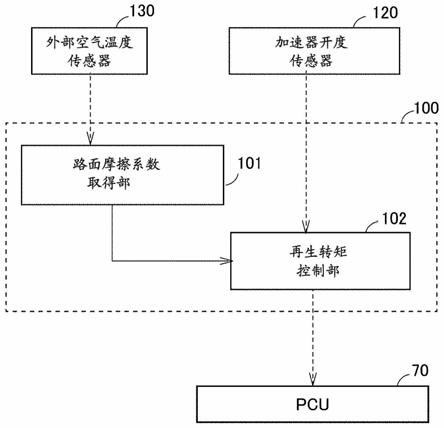
34.图2是本实施方式的hv
‑
ecu100的功能框图。hv
‑
ecu100具备路面摩擦系数取得部
101和再生转矩控制部102。这些结构可以通过软件处理实现,也可以通过硬件(电路)实现。
35.路面摩擦系数取得部101基于外部空气温度传感器130检测到的外部空气温度,推定并取得路面摩擦系数(路面μ)。具体而言,路面摩擦系数取得部101在外部空气温度低至路面冻结那样的情况下(例如,外部空气温度为2℃以下的情况下),推定为路面摩擦系数小(低μ路)。而且,路面摩擦系数取得部101在外部空气温度未低至路面冻结那样的情况下(例如,外部空气温度超过2℃的情况下),推定为路面摩擦系数大(高μ路)。
36.再生转矩控制部102在车辆的行驶中(例如,车速为规定值以上),在通过加速器开度传感器120检测到的加速器开度为0时,即,加速踏板未被踏入的情况下,判定为电动车辆1为减速中,算出mg60的再生转矩。图3是用于算出mg60的再生转矩的映射,再生转矩控制部102基于图3的映射,算出mg60的再生转矩。
37.在图3中,纵轴为再生转矩的大小,横轴为从再生开始时(减速开始时)起的时间。在图3中,a表示低μ路中的再生转矩a,d表示高μ路中的再生转矩d。低μ路中的再生转矩a的再生开始时的上升斜度比高μ路中的再生转矩d的再生开始时的上升斜度大。而且,低μ路中的再生转矩a的大小比高μ路中的再生转矩d小。通过再生转矩控制部102算出的再生转矩作为指令值向pcu70输出。pcu70以mg60的再生转矩与指令值一致的方式驱动mg60。
38.图4是表示通过hv
‑
ecu100的再生转矩控制部102处理的顺序的流程图。在电动车辆1的行驶中(例如,车速为规定值以上),每隔规定期间反复执行图4所示的流程图。首先,在步骤(以下,将步骤简称为“s”)1中,判断加速器开度是否为0。在加速器开度不为0的情况下,作出否定判断,结束本次的处理。在加速器开度不为0的情况下,由于不是减速中,因此根据电动车辆1的行驶状态而使mg60动力运转,将内燃机10的输出转矩与mg60的输出转矩相加,驱动作为驱动轮的后轮50。
39.当加速器开度成为0时,判断为开始减速,在s1中作出肯定判断,进入s2。在s2中,判断是否能够进行基于mg60的再生。具体而言,判断蓄电装置80的soc是否超过规定值α。在蓄电装置80的soc超过规定值α的情况下,如果向蓄电装置80进行充电,则可能会成为过充电,因此判断为基于mg60的再生困难。在s2中,如果判断为蓄电装置80的soc超过规定值α,则进入s3。需要说明的是,在s2中作出肯定判断的状态相当于本公开中的“规定的状态”。而且,在蓄电装置80的温度超过上限值的情况或mg60的温度超过上限值的情况下,s2也可以作出肯定判断(判断为基于mg60的再生困难)。
40.在s3中,将mg60的再生转矩设为0,进入s4。在s4中,执行减速时锁止离合器控制,控制变矩器20的锁止离合器。在本实施方式中,减速时锁止离合器控制是如下控制:在减速的初期将锁止离合器设为直接连结状态,使发动机制动器工作并维持内燃机10的旋转速度高的状态,扩大减速时的燃油中断区域,实现燃料利用率的提高。图5是表示电动车辆1的减速时(加速器开度=0的惯性行驶时)的减速度的图。在图5中,纵轴表示电动车辆1的减速度,横轴表示时间。单点划线表示再生转矩为0时,执行减速时锁止离合器控制之际的电动车辆1的减速度。即,单点划线表示仅基于发动机制动器的减速时的减速度。当开始减速时,通过将锁止离合器直接连结而使发动机制动器工作,减速度增大。然后,通过开始锁止离合器的滑移控制而使发动机制动器的大小减少,因此电动车辆1的减速度变小。
41.在s2中,当蓄电装置80的soc为规定值α以下时,判断为能够进行基于mg60的再生(在s2中作出否定判断),进入s5。在s5中,基于通过路面摩擦系数取得部101取得(推定)的
路面摩擦系数,算出mg60的再生转矩。具体而言,在外部空气温度低至路面冻结那样为低μ路的情况下,根据图3所示的映射,算出再生转矩a,在外部空气温度未低至路面冻结那样为高μ路的情况下,根据图3所示的映射,算出再生转矩d。然后,将算出的再生转矩作为指令值向pcu70输出,处理结束。
42.在电动车辆1的减速时,前轮载荷增加,但是后轮载荷减少。因此,作为后轮驱动的电动车辆1由于mg60的再生转矩产生的制动力而成为后轮50容易抱死的倾向。特别是在路面摩擦系数小的低μ路中,后轮50更容易抱死。因此,在低μ路中,希望减小mg60的再生转矩,抑制后轮50的抱死。然而,当mg60的再生转矩减小时,制动力减小,驾驶者感觉到的减速感也减少。
43.在本实施方式中,根据图3的映射,求出通过s5算出的mg60的再生转矩。在路面摩擦系数小的低μ路的情况下,算出再生转矩a,在路面摩擦系数大的高μ路的情况下,算出再生转矩d。低μ路中的再生转矩a的再生开始时(减速开始时)的上升斜度设定得比高μ路中的再生转矩d的上升斜度大。而且,低μ路中的再生转矩a的大小设定得比高μ路中的再生转矩d小。由于再生转矩a小,因此低μ路中的制动力减小,即使在低μ路中也能抑制后轮50的抱死。
44.在图5中,实线a表示再生转矩a下的电动车辆1的减速度a,实线d表示再生转矩d下的电动车辆1的减速度d。再生转矩a比再生转矩d小,但是再生开始时的再生转矩a的上升斜度比再生转矩d的上升斜度大。如图5所示,减速度a的上升比减速度d的上升早,即使再生转矩a小,驾驶者感觉到的减速感也增大,能够抑制低μ路与高μ路的减速感的变化,因此能够难以感觉到违和感。
45.如图5所示,减速度a的最大值(峰值)与减速度d的最大值(峰值)成为大致相同的值。这通过如下所述来实现,即,以高μ路中的再生转矩d及减速度d为基础,在基于再生转矩a的减速时,以减速度a的最大值(峰值)与减速度d的最大值(峰值)一致的方式进行实验及/或模拟,设定再生转矩a的上升斜度及大小来实现。由此,基于mg60的再生转矩的电动车辆1的减速度的最大值(峰值)在高μ路与低μ路中成为相同的值,因此能够进一步抑制驾驶者感觉到的减速感的变化。
46.如图5所示,减速度a的最大值(峰值)及减速度d的最大值(峰值)与由单点划线表示的仅基于发动机制动器的减速度的最大值(峰值)成为大致相同的值。这通过如下所述来实现,即,以由单点划线表示的减速度为基础,以减速度a的最大值(峰值)及减速度d的最大值(峰值)与单点划线的减速度的最大值(峰值)一致的方式进行实验及/或模拟,设定再生转矩a和再生转矩d的上升斜度及大小来实现。由此,也能够抑制在仅通过发动机制动器减速时驾驶者感觉到的减速感与在通过基于mg60的再生转矩进行减速时驾驶者感觉到的减速感的背离。因此,能够抑制驾驶者感觉到的低μ路与高μ路的减速感的变化,并且也能够抑制与未进行基于mg60的再生转矩的减速的情况下感觉到的减速感的差异。
47.在本实施方式中,如图3所示,再生转矩a及再生转矩d设定为,在再生开始后以规定的上升斜度增大,然后,逐渐减少。因此,与仅基于发动机制动器的减速同样地,制动力从减速的中途开始下降,能够减小前轮与后轮的制动力平衡根据mg60的再生的有无而变化的比例。
48.(变形例)
49.在上述的实施方式中,路面摩擦系数取得部101基于外部空气温度传感器130检测
到的外部空气温度,推定路面摩擦系数(路面μ),取得是低μ路还是高μ路的情况,从而比较简便地推定了路面摩擦系数。然而,通过路面摩擦系数取得部101取得路面摩擦系数的方法并不局限于此。例如,可以将多个波长的红外线激光朝向路面照射,通过测定其反射来检测路面的摩擦系数及路面状态(干、湿、冻结等),取得路面摩擦系数。而且,可以根据电动车辆1的车身速度和后轮50(驱动轮)的车轮速度来求出加速时的滑移率,基于该滑移率和加速度的最大值,推定路面摩擦系数。
50.在利用这样的手法取得了路面摩擦系数的情况下,能够取得低μ路/高μ路以外的路面摩擦系数,如图3所示,除了低μ路中的再生转矩a、高μ路中的再生转矩d之外,还能够设定再生转矩b及再生转矩c。由此,能够进行更细微的再生转矩的控制。路面摩擦系数的大小为再生转矩a<再生转矩b<再生转矩c<再生转矩d。需要说明的是,如图5所示,在基于再生转矩b的减速度b及基于再生转矩c的减速度c中,也是以其最大值(峰值)与其他的减速度的最大值(峰值)成为大致相同值的方式设定再生转矩b及再生转矩c。
51.在上述的实施方式中,说明了将mg60的输出轴经由带61连接于内燃机10的曲轴的混合动力车(电动车辆1),但也可以是图6所示的结构的电动车辆200。电动车辆200在变矩器20的输入轴设置有mg60a。即,mg60a的转子轴连接于变矩器20的输入轴。mg60a与内燃机10经由离合器11连接。其他结构是与电动车辆1同样的结构。
52.在电动车辆200中,通过将离合器11释放,能够不使用内燃机10的动力地进行仅基于mg60a的输出的行驶(ev行驶)。而且,通过将离合器11释放,也能够进行不使用发动机制动器地仅基于mg60a的再生转矩的减速。
53.在上述的实施方式中,说明了混合动力车作为电动车辆1,但是电动车辆也可以是不具备内燃机的电动机动车。在该情况下,难以得到图5所示的单点划线的减速度,但是以与再生转矩a~d对应的减速度a~d的最大值(峰值)成为大致相同的值的方式设定再生转矩a~d。
54.上述的实施方式是后轮驱动车,但也可以是前轮驱动车,还可以是全轮驱动车。
55.本次公开的实施方式应认为在全部的点上是例示性而非限制性。本发明的范围不是由上述实施方式的说明而是由权利要求书公开,并包含与权利要求书等同的意思及范围内的全部变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。