1.本发明属于航天技术领域,尤其涉及三维空间三体绳系系统以及空间局部电梯建模方法研究。
背景技术:
2.近年来,随着空间任务日趋多样化和复杂化,一些拓扑结构更加复杂的系统逐渐得到了研究人员的广泛关注,其中空间三体绳系系统便是其中的一个研究热点。该系统由一颗主星和两颗子星依次通过两段系绳连接,在三个航天器中,主星通常为空间站、航天飞机或大型卫星,其质量远大于另外两颗子星,子星一般为微/小卫星或飞船,可以实现两端星之间运送货物或航天人员、以及空间观测任务。相比传统空间运输,空间三体绳系系统具有可重复使用、空间环境中直接操作、节省发射成本等优点。针对空间三体绳系系统的动力学与控制问题,建立系统的数学模型是研究的基础。绳系卫星主星和子星之间采用柔性系绳连接,由于弹性系绳易于弯曲和扭转的特性,以及在离轨过程中会受到重力梯度、大气阻力等多方面影响,呈现复杂的非线性动力学特性,所以针对空间三体绳系系统的动力学建模非常复杂。
3.现在技术在空间局部电梯动力学建模方面做了深入的研究和仿真验证,其主要结论归纳如下:
4.misra等在文献1【mirsa a.k.,amier z.,modi v.j.attitude dynamics of three
‑
body tethered systems[j].acta astronautica,1988,17(10):1059
‑
1068.】中,结合绳系卫星“哑铃”模型的建模优点,建立以子星(系绳)摆角和绳长为自由变量,通过拉格朗日第二方程建立四自由度动力学方程。该模型完整的描述了空间三体绳系的面内摆动问题,但忽略了系统的轨道特性和面外运动。之后,misra等在文献2【misra a k,modi v j.three
‑
dimensional dynamics and control of tether
‑
connected n
‑
body systems[j].acta astronautica,1992,26(2):77
‑
84.】中,推导了三维空间的n
‑
体空间绳系的动力学模型,该模型通用于任意轨道下面外角和面内角在系绳变化情况下的运动。文中以空间局部电梯为例,研究了面内角与面外角在中端体运动过程的动力学摆动情况。但该模型通过拉格朗日第二定理建立系统动力学方程,方程中未能对各自由变量进行解耦,因此,并不能有效的进行相关的非线性控制研究。
[0005]
此后,文献3【kojima h,sugimoto t.stability analysis of in
‑
plane and out
‑
of
‑
plane periodic motions of electrodynamic tether system in inclined elliptic orbit[j].acta astronautica,2009,65(3
‑
4):477
‑
488.】充分考虑轨道要素和系绳摆动特性,建立考虑轨道半径、轨道角速度和轨道倾角的轨道要素和两段系绳的面内与面外角的七自由度空间三体绳系系统。这种模型的建立描述了系统系绳摆动和系统质心的轨道运动,但忽略了系绳长度的变化。
[0006]
文献4【woo p,misra r k.dynamics of a partial space elevator with multiple climbers[j].acta astronautica,2010,67(7
‑
8):p.753
‑
763.】在文献2的基础
上,忽略面外运动,借鉴文献2中对系统各子星的位置矢量,通过拉格朗日第二方程建立空间多体绳系的面内角变化动力学方程。方程的建立过程中不考虑系绳变化,因此可以得到关于面内角的状态方程。
[0007]
文献5【jung w.,mazzoleni a.p.,chung j.nonlinear dynamic analysis of a three
‑
body tethered satellite system with deployment/retrieval[j].nonlinear dynamics,2015,82(3):1127
‑
1144.】充分考虑轨道要素和系绳变化特性,建立考虑轨道半径、轨道角速度的轨道要素和两段系绳的面内与其中一段系绳变化的空间三体绳系系统。该系统可以反映中端体沿系绳移动过程中会产生较为明显的面内角摆动。
技术实现要素:
[0008]
要解决的技术问题
[0009]
目前国内外对于空间三体绳系系统建模研究主要以拉格朗日第二方程的能量法,以力学分析的角度对空间三体绳系系统建模研究还未见公开报道。因此,本发明主要针对空间三体绳系系统力学建模这一问题提出了解决方法,拟基于牛顿定理,进行空间三体绳系系统建模推导,以期为实现空间三体绳系系统建模提供理论基础。
[0010]
技术方案
[0011]
本发明主要用于建立空间三体绳系系统由于考虑中端体运动过程导致面内角、面外角和系绳长度变化的五自由度动力学方程。消除和克服当前空间三体绳系系统建模过程对系统的简化(或是忽略了系绳长度变化,或是不考虑面外角运动),以及所建立的动力学方程无法解耦化解成状态方程的问题。通过基于牛顿法的传统力学分析手段,建立一组完备的、具有理论依据的新的三维空间动力学方程,以完善对于空间三体绳系系统的研究,同时支撑动力学与控制的相关研究工作。
[0012]
一种基于牛顿法的三维空间三体绳系系统建模方法,其特征在于步骤如下:
[0013]
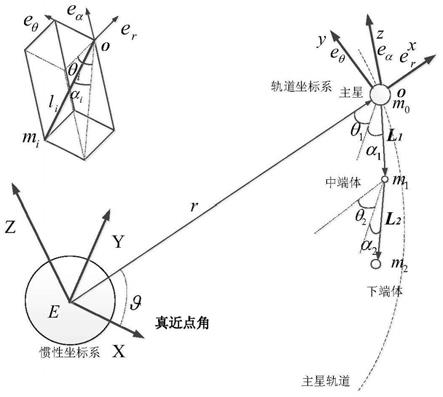
步骤1:定义所需的三组坐标系:
[0014]
(1)地心惯性坐标系:e
‑
xyz
[0015]
定义exyz为地心惯性坐标系,坐标系原点e位于地球中心位置,ex轴在赤道面内并指向春分点,ez轴与地球自转轴重合,ey轴由右手定则确定;
[0016]
(2)轨道坐标系:o
‑
xyz
[0017]
定义oxyz为轨道坐标系,由轨道半径真近点角和轨道旋转角速度ω确定,坐标系原点o与主星质心位置固联,ox轴由地心指向主星质心方向向外,oy轴指向航天器运动方向垂直于ox轴,oz轴垂直于o
‑
xy平面由右手螺旋定则确定;
[0018]
(3)本体坐标系:o
‑
x
i y
i z
i
,i=1,2
[0019]
定义本体坐标系ox
i y
i z
i
,原点o位于主星质心,ox
i
轴延系绳指向主星的质心o方向,通过轨道坐标系oxyz先绕z轴旋转θ
i
,在绕y轴旋转α
i
得到本体坐标系;
[0020]
步骤2:设置系统物理参数和各参数表达符号:
[0021]
设主星、中端体和下端体质量分别是m0,m1,m2;系绳视为轻杆,各卫星由系绳依次连接,其中l1,l2对应两段系绳的长度;α1,α2表示两条系绳与o
‑
xy平面的夹角,称为面外角;θ1,θ2表示两条系绳在o
‑
xy平面的投影与ox轴的夹角,也称为面内角;系统质心距离地心的距离为r;为主星的轨道角速度;
[0022]
步骤3:第一段系绳受力分析,并完成动力学建模:
[0023]
定义连接m0和m1的绳段为其长度为
‑
l1,从惯性坐标系原点o到轨道坐标系原点o的位置矢量为从惯性坐标系原点o到中端体m1的位置矢量为由以上定义有如下等式成立:
[0024][0025]
绳段l1的体坐标系ox
1 y
1 z1相对于惯性坐标系的转动角速度ω1可以表示如下:
[0026][0027]
其中,撇号表示对时间的导数,ω表示轨道角速度,对式(1)求对时间的二阶导数得:
[0028][0029]
主星受到万有引力g0和系绳1对其的拉力t1的作用;中端体受到万有引力g1,两段系绳的拉力t1,t2,以及外力f1,根据牛顿第二定律即以上受力分析,绳段1上的受力满足下式:
[0030]
r
″0‑
r
″1=(t1 g0)/m0‑
(t2‑
t1 g1‑
f1)/m1ꢀꢀꢀꢀꢀꢀ
(4)
[0031]
将上式中的t1,t2通过坐标变换变换到系绳l1的本体坐标系ox
1 y
1 z1上有:
[0032][0033]
设f1作用在本体坐标系ox
1 y
1 z1上,其坐标为[0 0 f1]
t
;
[0034]
在轨道坐标系中定义主星与中端体的位置矢量分别为r0,r1,其中,则两星受到的重力矢量为:
[0035][0036]
特别指出l0=0,万有引力常数μ=398600km3/s2;对上式进行泰勒展开,仅保留一阶项,有:
[0037][0038][0039]
在本体坐标系ox
1 y
1 z1中,将r0由轨道坐标系变换到本体坐标系ox
1 y
1 z1有:
[0040][0041]
将其代入式(8),可得:
[0042][0043]
可得系统动力学方程:
[0044][0045][0046]
[0047]
步骤4:第二段系绳受力分析与动力学建模:
[0048]
定义连接m1和m2的绳段为其长度为l2,从惯性坐标系原点o到中端体m1的位置矢量为从中端体m1到下端体m2的位置矢量为由以上定义有如下等式成立:
[0049][0050]
绳段l2的体坐标系ox
2 y
2 z2相对于惯性坐标系的转动角速度ω2可以表示如下:
[0051][0052]
其中,撇号表示对时间的导数,ω表示轨道角速度,对式(13)求对时间的二阶导数得:
[0053][0054]
子星1受到万有引力g1和系绳1和2对其的拉力t1,t2的作用,以及外力f1;下端体受到万有引力g2,系绳2的拉力t2,以及外力f2,则绳段2上的受力满足下式:
[0055]
r
″1‑
r2″
=(t2‑
t1 g1‑
f1)/m1‑
(
‑
t2 g2‑
f2)/m2ꢀꢀꢀꢀꢀ
(16)
[0056]
将上式中的t1通过坐标变换变换到系绳l2的本体坐标系ox
2 y
2 z2上有:
[0057][0058]
设f2作用在本体坐标系ox
2 y
2 z2上,其坐标为[0 0 f2]
t
;
[0059]
与绳段1中重力矢量差结果类似,在轨道坐标系中定义子星1与子星2的位置矢量分别为r1,r2,其中,则两星受到的重力矢量差为:
[0060][0061]
可得系统动力学方程:
[0062][0063][0064][0065]
步骤5:将上述两动力学方程组合建立空间三体绳系动力学模型;同时,若假设l1 l2=常数,方程组(12)和(19)中的第一式可以合并化解为一个常微分方程,这样就可以得到局部空间电梯动力学模型。
[0066]
有益效果
[0067]
本发明提出的基于牛顿法建立空间三体绳系系统六自由度系统建模方法,实现了空间局部电梯三维空间动力学建模与解耦,对于空间三体绳系系统的动力学研究与控制律设计有着重要的意义。同时,可以通过系绳的物理特性,设置系绳物理约束,转化为空间局部电梯动力学模型。通过实施实例可以得出:在给定系统物理参数和系绳展开形式的条件下,该模型可以验证系统在展开部署过程中系统的系绳摆动动态特性和系绳张力特性,为实际部署空间三体绳系系统提供理论验证。例如,在本发明实施实例的工作条件下,得出图4系绳摆动动态特性及图5系绳张力特性。分析图4和5,可以得出系统经过3个轨道周期基本完成展开部署10km的任务,在完成任务的过程中系绳的摆角范围均未超过90
°
且逐步收敛于零,同时在该过程中,系绳张力大小呈阶梯状上升,在展开后达到最大,约20n。
附图说明
[0068]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0069]
图1空间三体绳系系统组成与坐标系定义示意图;
[0070]
图2绳段1矢量定义示意图;
[0071]
图3绳段2矢量定义示意图;
[0072]
图4系绳摆动动态特性;
[0073]
图5系绳张力特性。
具体实施方式
[0074]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0075]
本发明的工作体为由两条系绳连接的三个航天器所构成的局部空间电梯系统。绳长视具体工况决定,一般来说在10公里左右。当系统各部分连接完毕,整个系统可以视为一个空间三体空间绳系系统。本发明建立了空间三体绳系系统的模型;以数值仿真实例验证了本发明提出的方法的有效性。该发明的实施主要包括以下五个步骤:
[0076]
第一步:定义本发明所需的三组坐标系:
[0077]
(1)地心惯性坐标系:e
‑
xyz
[0078]
定义exyz为地心惯性坐标系,坐标系原点e位于地球中心位置,ex轴在赤道面内并指向春分点,ez轴与地球自转轴重合,ey轴由右手定则确定;
[0079]
(2)轨道坐标系:o
‑
xyz
[0080]
定义oxyz为轨道坐标系,由轨道半径真近点角和轨道旋转角速度ω确定,坐标系原点o与主星质心位置固联,ox轴由地心指向主星质心方向向外,oy轴指向航天器运动方向垂直于ox轴,oz轴垂直于o
‑
xy平面由右手螺旋定则确定;
[0081]
(3)本体坐标系:o
‑
x
i y
i z
i
(i=1,2)
[0082]
定义本体坐标系ox
i y
i z
i
,原点o位于主星质心,ox
i
轴延系绳指向主星的质心o方向,通过轨道坐标系oxyz先绕z轴旋转θ
i
,在绕y轴旋转α
i
得到本体坐标系。
[0083]
第二步:设置系统物理参数和各参数表达符号:
[0084]
设主星、中端体和下端体质量分别是m0,m1,m2;系绳视为轻杆,各卫星由系绳依次连接,其中l1,l2对应两段系绳的长度;α1,α2表示两条系绳与o
‑
xy平面的夹角,称为面外角;θ1,θ2表示两条系绳在o
‑
xy平面的投影与ox轴的夹角,也称为面内角;系统质心距离地心的距离为r;为主星的轨道角速度。
[0085]
第三步:第一段系绳受力分析,并完成动力学建模:
[0086]
如图3所示,定义连接m0和m1的绳段为其长度为
‑
l1,从惯性坐标系原点o到轨道坐标系原点o的位置矢量为从惯性坐标系原点o到第一颗子星(中端体)m1的位置矢量为由以上定义及示意图有如下等式成立:
[0087][0088]
绳段l1的体坐标系ox
1 y
1 z1相对于惯性坐标系的转动角速度ω1可以表示如下:
[0089][0090]
其中,撇号表示对时间的导数,ω表示轨道角速度,对式(1)求对时间的二阶导数
得:
[0091][0092]
主星受到万有引力g0和系绳1对其的拉力(即绳的张力)t1的作用;中端体受到万有引力g1,两段系绳的拉力t1,t2,以及外力(助推器推力)f1,根据牛顿第二定律即以上受力分析,绳段1上的受力满足下式:
[0093]
r
″0‑
r
″1=(t1 g0)/m0‑
(t2‑
t1 g1‑
f1)/m1ꢀꢀꢀꢀꢀꢀ
(4)
[0094]
将上式中的t1,t2通过坐标变换变换到系绳l1的本体坐标系ox
1 y
1 z1上有:
[0095][0096]
设f1作用在本体坐标系ox
1 y
1 z1上,其坐标为[0 0 f1]
t
。
[0097]
在轨道坐标系中定义主星与子星1(中端体)的位置矢量分别为r0,r1,其中,则两星受到的重力矢量为:
[0098][0099]
特别指出l0=0,万有引力常数μ=398600km3/s2。对上式进行泰勒展开,仅保留一阶项,有:
[0100]
[0101][0102]
在本体坐标系ox
1 y
1 z1中,将r0由轨道坐标系变换到本体坐标系ox
1 y
1 z1有:
[0103][0104]
将其代入式(8),可得:
[0105][0106]
可得系统动力学方程:
[0107][0108][0109][0110]
第四步:第二段系绳受力分析与动力学建模:
[0111]
如图4所示,定义连接m1和m2的绳段为其长度为l2,从惯性坐标系原点o到第一颗子星(中端体)m1的位置矢量为从第一颗子星(中端体)m1到第二颗子星(下端体)m2的位置矢量为由以上定义及示意图有如下等式成立:
[0112][0113]
绳段l2的体坐标系ox
2 y
2 z2相对于惯性坐标系的转动角速度ω2可以表示如下:
[0114][0115]
其中,撇号表示对时间的导数,ω表示轨道角速度,对式(13)求对时间的二阶导数
得:
[0116][0117]
子星1受到万有引力g1和系绳1和2对其的拉力(即绳的张力)t1,t2的作用,以及外力(助推器推力)f1;子星2(下端体)受到万有引力g2,系绳2的拉力t2,以及外力(助推器推力)f2,则绳段2上的受力满足下式:
[0118]
r
″1=r2″
=(t2‑
t1 g1‑
f1)/m1‑
(
‑
t2 g2‑
f2)/m2ꢀꢀꢀꢀꢀ
(16)
[0119]
将上式中的t1通过坐标变换变换到系绳l2的本体坐标系ox
2 y
2 z2上有:
[0120][0121]
设f2作用在本体坐标系ox
2 y
2 z2上,其坐标为[0 0 f2]
t
。
[0122]
与绳段1中重力矢量差结果类似,在轨道坐标系中定义子星1与子星2的位置矢量分别为r1,r2,其中,则两星受到的重力矢量差为:
[0123][0124]
可得系统动力学方程:
[0125]
[0126][0127][0128]
第五步:将上述两动力学方程组合建立空间三体绳系动力学模型;同时,若假设l1 l2=常数,方程组(12)和(19)中的第一式可以合并化解为一个常微分方程,这样就可以得到局部空间电梯动力学模型。
[0129]
设计系绳展开策略,验证系统动力学特性。
[0130]
基于上述建立的三维空间局部电梯动力学模型,简要分析了空间三体绳系系统的初始状态不在平衡位置时,系统在无控状态下动力学响应,给出以下系统物理参数:
[0131]
m0=103kg,m1=100kg,m2=500kg,r=7100km。
[0132]
系统初始参数:
[0133]
l1=2m,l2=20m,l0=22m,θ1(0)=10
°
,θ2(0)=20
°
,α1(0)=5
°
,α2(0)=4
°
,
[0134]
两系绳长度随时间变化的形式以下面分段函数形式表达:
[0135][0136]
其中,l
10
=2m,l
20
=20m,l
11
=100m,l
21
=1000m,l
12
=1000m,l
22
=10000m。终了时刻的系绳长度参数为:l
1f
=1098m,l
2f
=10980m。设置速度展开变量c1l
11
=0.077m/s,c2l
21
=0.77m/s。通过计算可以得出系绳展开到l
i1
,l
i2
,l
if
所需的时间t1,t2,t
f
分别是5080.5、16768.9、21849.4秒。通过图4和5可以看到,系统经过3个轨道周期基本完成展开部署两段系绳的任务,在任务的过程中系绳的摆角范围均未超过90
°
,系绳张力大小阶梯上升,峰值约20n,有效地利用该模型验证了系绳部署过程中的系统动力学特性。
[0137]
实验证明,本发明可以实现对空间三体绳系系统的动力学建模和动态特性的验证。
[0138]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

