技术特征:
1.一种变电站操作机器人精准定位方法,其特征在于,包括以下步骤:s1:合理布置变电站的参考点;s2:依次在设置的参考点上采集位置信息;s3:将采集到的位置信息建立位置数据库;s4:对机器人工作点的位置进行实时采集;s5:实时采集数据与数据位置库进行匹配对比;s6:通过数据筛选即可实现精准定位。2.根据权利要求1所述的变电站操作机器人精准定位方法,其特征在于,所述s1中参考点的选取是基于日常需要机器人进行操作的常规位置进行分布的,并且每个参考点都有唯一的位置数据库信息,通过对参考点的位置采集存储即可实现电子地图的建立。3.根据权利要求1和2所述的变电站操作机器人精准定位方法,其特征在于,所述参考点基于测量待测位置与4个路由之间的距离来推算自身的位置信息,并且选取的4个路由需要不在同一直线上,待测位置信息与4个路由之间的距离信息即为该位置点的位置数据库,表达式如下:式中4个路由的坐标分别为a(x1,y1),b(x2,y2),c(x3,y3),d(x4,y4),待测位置信息为p(x,y),d为待测位置到各个路由之间的距离,d
a
表示待测位置到路由a的距离,d
b
表示待测位置到路由b的距离,d
c
表示待测位置到路由c的距离,d
d
表示待测位置到路由d的距离,对上述方程组求解即可得出位置信息。4.根据权利要求1所述的变电站操作机器人精准定位方法,其特征在于,所述s2中参考点上的位置信息是基于wifi信号所产生的唯一mac物理地址作为位置便签建立的,需要利用wifi网络接入点定期采集接收信号强度的物理地址进行定位,所述物理地址由16进制48位的整数组成,采集位置信息的过程中需要手持移动设备在待测区间的参考点内进行多次移动移动设备采集到4个路由之间的信号强度。5.根据权利要求1所述的变电站操作机器人精准定位方法,其特征在于,所述s3中需逐一对接收到的wifi接入点信号的参考点进行多次测量,对测量的多组数据进行处理取标准值并保存在位置数据库中,所述位置数据库可真实反映参考点与空间位置的映射关系。6.根据权利要求1所述的变电站操作机器人精准定位方法,其特征在于,所述s5中匹配对比采取邻域法,通过算法即可筛选出与位置数据库中最接近的位置信息,假设检测到的wifi信号的物理地址mac为向量[mac1,mac2
…
macn],再与数据位置库进行匹配,并滤除不需要的信号,记录监测的信号强度为向量[r1,r2…
r
m
]式中每一行向量表示一个位置信息,共有p个位置点,每一个位置点包含n和不同参考点的信号强度,pn为位置点左边,表达成向量r关系如下:
监测信号强度的距离计算表达式为:式中d
m
表示信号强度距离,r
j
表示实时测量的位置信号强度,mac
pm
表示数据位置库中的物理地址信号强度,r
11
的第一个脚表1表示第1行,r
21
第一个脚表2表示第2行,r
p1
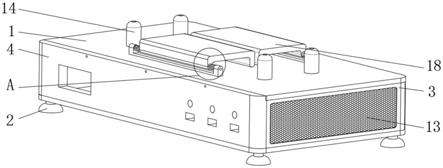
即表示第p行,q表示维度,用上述公式所得的距离进行比较大小,通过选取最小数据即可筛选出定位点。7.一种变电站操作机器人,采用权利要求1
‑
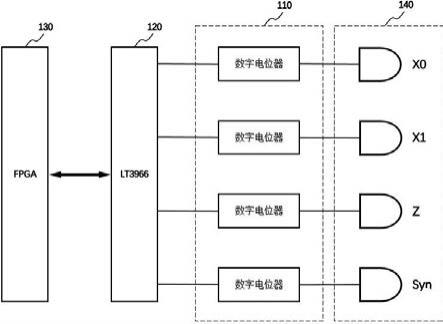
6任意一项所述的电站操作机器人精准定位方法,其特征在于,所述机器人包括位于顶部的机械臂(1),位于中间的手车地刀浮动平台(2)和位于底部的底盘(3)。8.根据权利要求7所述的一种变电站操作机器人,其特征在于,所述机械臂末端安装有手抓,实现对按钮旋钮等目标的操作,所述底盘上装有信号监测仪(4),通过实时监测机器人的位置信息,上传到云端服务器,云端服务器后台利用内置算法进行处理,即可实现机器人自我导航。9.根据权利要求7所述的一种变电站操作机器人,其特征在于,所述机器人本体是基于ros节点为载体进行巡检,通过网口和本体各硬件进行交互,实现姿态控制和位置信息的获取,姿态控制用于调整机械臂、底盘和浮动平台等部件位姿,而位置信息的获取是基于底盘上的信号检测仪探测的数据,经过计算和分析后,生成巡检结果或者引导姿态控制。
技术总结
本发明公开了一种变电站操作机器人及其精准定位方法,克服了现有技术人为操作危险性高以及机器人操作定位困难的问题,包括:合理布置变电站的参考点;依次在设置的参考点上采集位置信息;将采集到的位置信息建立位置数据库;对机器人工作点的位置进行实时采集;实时采集数据与数据位置库进行匹配对比;通过数据筛选即可实现精准定位。本发明可以避免人为操作的危险,安全系数高;可以使巡检机器人对复杂环境的实时自适应地图构建;同时可以根据不同的变电站需求进行适应性修改,智能化程度高。高。高。
技术研发人员:钱平 丁一岷 范明 傅进 曹阳 周刚 李锐锋 罗志远 沈中元 姚健 李栗 蔡海晨
受保护的技术使用者:亿嘉和科技股份有限公司
技术研发日:2021.08.04
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。