1.本发明涉及变电站操作领域,尤其是涉及一种变电站操作机器人及其精准定位方法。
背景技术:
2.变电站是电力系统的重要组成部分,作为电力系统中变换电压,传输电能的枢纽,有着极其重要的地位。在电力系统中,倒闸操作是切换电气设备运行状态的一种操作,是传统运维中必不可少的一项作业环节。传统的倒闸作业都是由专业的电力工人来操作配电开关柜实现,由于受操作人员劳动强度、责任心、业务水平和精神状态等诸多因素的制约,电工操作时容易发生安全事故,为电网公司和人民财产带来严重的损失。由此可见,人工操作已经越来越无法满足现代化变电站安全稳定运行的需求,随着传感器、单片机、机器学习、机器人等技术的兴起和发展,采用智能机器人执行倒闸操作将是智能电网发展的必然趋势。
3.例如,一种在中国专利文献上公开的“变电站操作全过程危险点警示预控系统”,其公告号cn102361224a,包括包括防误主机、通讯适配器、电脑钥匙、及编码锁,在防误主机上安装五防软件,其结构要点在于:在五防软件中关联有二次压板规则库,所述的锁具还包括用于对二次压板操作进行检测的二次压板状态检测锁。本发明的优点在于:提供了一种既具备当前微机五防功能,同时还可对带有危险点信息的各类设备操作时进行提示和确认,起到一个提醒运行人员谨慎操作、强化操作人员安全意识的变电站操作全过程危险点警示预控系统。但依赖于人为操作,人为巡查可能受干扰因素较多,不如机器人代替操作更为安全。而让机器人随时知道自己身处什么位置对于机器人在变电站的操作是十分重要的。
技术实现要素:
4.本发明的目的在于克服现有技术的人为操作危险性高提供了一种用于变电站操作机器人精准定位方法,可以实现让机器人对自己的精准定位,进一步实现对自己的操作过程进行导航。
5.为了实现上述目的,本发明采用以下技术方案:一种变电站操作机器人精准定位方法,包括以下步骤:s1:合理布置变电站的参考点;s2:依次在设置的参考点上采集位置信息;s3:将采集到的位置信息建立位置数据库;s4:对机器人工作点的位置进行实时采集;s5:实时采集数据与数据位置库进行匹配对比;s6:通过数据筛选即可实现精准定位。
6.变电站内有多个需要机器人操作的位置,例如变电站倒闸操作分为一次二次的设
备操作,而这这些设备的操作位置周围可设置参考点。wifi信号在空间内自由传播,距离发射点越远能量损耗就越大,根据wifi信号的这一衰减传播特性,依靠已知的路由信息即可建立参考点与各个路由信息的位置关系,将这些位置关系汇总即可建立变电站内的位置数据库,也就是变电站的数据电子地图,当机器人进行操作时,通过底盘上的信号检测仪,即可获得实时的机器人位置信息,通过与数据库的信息进行数据筛选比较出差值最小的位置数据即可实现机器人的精准定位。
7.作为优选,所述s1中参考点的选取是基于日常需要机器人进行操作的常规位置进行分布的,并且每个参考点都有唯一的位置数据库信息,通过对参考点的位置采集存储即可实现电子地图的建立。
8.作为优选,所述参考点基于测量待测位置与4个路由之间的距离来推算自身的位置信息,并且选取的4个路由需要不在同一直线上,待测位置信息与4个路由之间的距离信息即为该位置点的位置数据库,表达式如下:式中4个路由的坐标分别为a(x1,y1),b(x2,y2),c(x3,y3),d(x4,y4),待测位置信息为p(x,y),d为待测位置到各个路由之间的距离,d
a
表示待测位置到路由a的距离,d
b
表示待测位置到路由b的距离,d
c
表示待测位置到路由c的距离,d
d
表示待测位置到路由d的距离,对上述方程组求解即可得出位置信息。
9.作为优选,所述s2中参考点上的位置信息是基于wifi信号所产生的唯一mac物理地址作为位置便签建立的,需要利用wifi网络接入点定期采集接收信号强度的物理地址进行定位,所述物理地址由16进制48位的整数组成,采集位置信息的过程中需要手持移动设备在待测区间的参考点内进行多次移动移动设备采集到4个路由之间的信号强度。
10.作为优选,所述s3中需逐一对接收到的wifi接入点信号的参考点进行多次测量,对测量的多组数据进行处理取标准值并保存在位置数据库中,所述位置数据库可真实反映参考点与空间位置的映射关系。
11.作为优选,所述s5中匹配对比采取邻域法,通过算法即可筛选出与位置数据库中最接近的位置信息,假设检测到的wifi信号的物理地址mac为向量[mac1,mac2
…
macn],再与数据位置库进行匹配,并滤除不需要的信号,记录监测的信号强度为向量[r1,r2…
r
m
]式中每一行向量表示一个位置信息,共有p个位置点,每一个位置点包含n和不同参考点的信号强度,pn为位置点左边,表达成向量r关系如下:监测信号强度的距离计算表达式为:
式中d
m
表示信号强度距离,r
j
表示实时测量的位置信号强度,mac
pm
表示数据位置库中的物理地址信号强度,r
11
的第一个脚表1表示第1行,r
21
第一个脚表2表示第2行,r
p1
即表示第p行,q表示维度,用上述公式所得的距离进行比较大小,通过选取最小数据即可筛选出定位点。
[0012]
作为优选,一种变电站操作机器人,包括位于顶部的机械臂,位于中间的手车地刀浮动平台和位于底部的底盘。
[0013]
作为优选,所述机械臂末端安装有手抓,实现对按钮旋钮等目标的操作,所述底盘上装有信号监测仪,通过实时监测机器人的位置信息,上传到云端服务器,云端服务器后台利用内置算法进行处理,即可实现机器人自我导航。
[0014]
作为优选,所述机器人本体是基于ros节点为载体进行巡检,通过网口和本体各硬件进行交互,实现姿态控制和位置信息的获取,姿态控制用于调整机械臂、底盘和浮动平台等部件位姿,而位置信息的获取是基于底盘上的信号检测仪探测的数据,经过计算和分析后,生成巡检结果或者引导姿态控制。
[0015]
因此,本发明有如下有益效果:1可以避免人为操作的危险,安全系数高。
[0016]
2可以使巡检机器人对复杂环境的实时自适应地图构建。
[0017]
3可以根据不同的变电站需求进行适应性修改,智能化程度高。
附图说明
[0018]
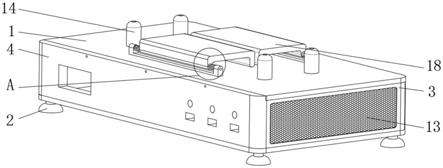
图1是本实施例机器人结构示意图;图中:1、机械臂 2、手车地刀浮动平台 3、底盘 4、信号监测仪。
具体实施方式
[0019]
下面结合附图与具体实施方式对本实施例做进一步的描述。
[0020]
下面结合附图与具体实施方式对本实施例做进一步的描述。
[0021]
本实施例提供了一种变电站机器人,图1中,机械臂1位于变电站机器人顶部,手车地刀浮动平台2位于变电扎机器人中部,底盘3位于机器人底部,信号检测仪4位于底盘3上,可以在机器人工作过程中实时监测机器人的位置信息,机械臂的末端执行器,能够自动执行倒闸操作,操作目标包括线路保护装置、紧急分合闸、地刀、手车、旋钮、钥匙及辅助保护装置的状态切换,手车地刀浮动平台实现手车和地刀的操作,通过前后两个轴上的位移实现水平和垂直方向的角度微调。
[0022]
本实施例相应的提供了一种变电站操作机器人精准定位方法:s1:合理布置变电站的参考点;s2:依次在设置的参考点上采集位置信息;s3:将采集到的位置信息建立位置数据库;s4:对机器人工作点的位置进行实时采集;
s5:实时采集数据与数据位置库进行匹配对比;s6:通过数据筛选即可实现精准定位。
[0023]
在变电站内建立多个日常工作位置的参考点,设置4个路由,保证这4个路由不在同一直线上,参考点上的位置信息是基于wifi信号所产生的唯一mac物理地址作为位置便签建立的,需要利用wifi网络接入点定期采集接收信号强度的物理地址进行定位,所述物理地址由16进制48位的整数组成,采集位置信息的过程中需要手持移动设备在待测区间的参考点内进行多次移动移动设备采集到4个路由之间的信号强度。
[0024]
待测位置信息与4个路由之间的距离信息即为该位置点的位置数据库,表达式如下:式中4个路由的坐标分别为a(x1,y1),b(x2,y2),c(x3,y3),d(x4,y4),待测位置信息为p(x,y),d为待测位置到各个路由之间的距离,d
a
表示待测位置到路由a的距离,d
b
表示待测位置到路由b的距离,d
c
表示待测位置到路由c的距离,d
d
表示待测位置到路由d的距离,对上述方程组求解即可得出位置信息。
[0025]
在机器人的盘上装有信号监测仪,通过实时监测机器人的位置信息,上传到云端服务器,云端服务器后台利用内置算法进行处理,匹配对比采取邻域法,通过算法即可筛选出与位置数据库中最接近的位置信息,假设检测到的wifi信号的物理地址mac为向量[mac1,mac2
…
macn],再与数据位置库进行匹配,并滤除不需要的信号,记录监测的信号强度为向量[r1,r2…
r
m
]式中每一行向量表示一个位置信息,共有p个位置点,每一个位置点包含n和不同参考点的信号强度,pn为位置点左边,表达成向量r关系如下:监测信号强度的距离计算表达式为:式中d
m
表示信号强度距离,r
j
表示实时测量的位置信号强度,mac
pm
表示数据位置库中的物理地址信号强度,r
11
的第一个脚表1表示第1行,r
21
第一个脚表2表示第2行,r
p1
即表示第p行,q表示维度,用上述公式所得的距离进行比较大小,通过选取最小数据即可筛选出定位点,一般选取q=2即为欧式距离。
[0026]
在机器人的操作过程中,用户可通过集控中心&远程查看站所环境和机器人位置信息及状态数据,以及下发巡检和操作指令等,而机器人本体接收到巡检和操作指令后执行相应的柜体状态识别或者倒闸目标操作。
[0027]
机器人本体是巡检和操作功能的执行主体,主要由ros节点、核心服务、文件服务、数据库服务和实时视频服务构成。ros节点是本体功能实现的核心载体,其通过网口和本体各硬件进行交互,实现姿态控制和状态获取。姿态控制用于调整机械臂、底盘和云台等部件位姿等,而状态获取则从本体搭载传感器获取数据,经过计算和分析后,生成巡检结果或者引导姿态控制。ros节点在巡检和操作中生成的结果文件暂存在文件服务中,并经网络进一步上传到工区的文件服务器。
[0028]
本发明的工作过程如下:在变电站内建立多个日常工作位置的参考点,设置4个路由,保证这4个路由不在同一直线上,依靠已知的路由信息即建立参考点与各个路由信息的位置关系,将这些位置关系汇总即可建立变电站内的位置数据库,也就是变电站的数据电子地图,当机器人进行操作时,通过底盘上的信号检测仪,即可获得实时的机器人实时位置信息,机器人将这些信号强度的位置信息上传给云端服务器,端服务器后台利用内置算法进行处理,通过与数据库的信息进行数据筛选比较出差值最小的位置数据即可实现机器人的精准定位。
[0029]
本发明并不限于上文描述的实施方式,以上所述仅是本发明的较佳实施例,并不用以限制本发明。凡是依据本发明的技术实质所作的任何修改、等同变换、改进等,均属于本发明所要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。