1.本发明涉及激光测量技术领域,特别是一种温度和振动测量系统及方法。
背景技术:
2.随着工业4.0的不断深入,传感检测系统也不断朝着小型化、集成化、数字化和智能化发展。振动和温度是工业生产、科学研究中常见的测量物理量,目前在很多场景如泵机健康监测、电机故障分析中,需要同时检测振动和温度,而目前市场上尚无小巧便携的非接触式振动和温度传感器或测量系统。
3.随着工业4.0的不断深入,传感检测系统也不断朝着小型化、集成化、数字化和智能化发展。振动和温度是工业生产、科学研究中常见的测量物理量,目前在很多场景如泵机健康监测、电机故障分析中,需要同时检测振动和温度,而目前市场上尚无小巧便携的非接触式振动和温度传感器或测量系统。
4.自混合干涉技术具有结构简单、易准直等优点,且对激光光源相干性无特定要求,激光器选择自由度大,因此在非接触测振领域得到广泛研究与应用。激光自混合测速的基本原理是通过分析激光器输出功率的变化获得物体运动产生的多普勒频率,根据其与速度的线性关系计算出物体的速度。激光自混合测位移则可以通过数干涉条纹或相位解卷法来实现。
5.红外测温技术利用对物体发出的红外辐射确定其温度,具有非接触测量、测量范围广、灵敏度高等优点,已广泛应用于工业生产、医疗健康等领域。目前市场上红外测温仪根据原理可分为两类:单色测温仪和双色测温仪(比色测温仪)。单色测温仪根据物体某一狭窄波长范围内发出的辐射能量确定温度大小,测量值易受发射率、背景辐射、镜头污染等因素影响。双色测温仪利用两个波段红外辐射能量的比值确定温度大小,能消除发射率变化、传输介质、检测目标大小变化等因素的影响。
6.激光自混合干涉的光强信号是一个三角函数的形式,因此为了解析出相位信息,需要使用反三角函数。经过反三角函数计算后,函数的值域在区间[
‑
,],如果信号的相位超过这个区域,就产生了包裹相位,包裹相位只有经过
±
2后才会落在此区域。所以对于反三角函数处理后的信号,需要进行
±
2解包裹处理后,才能还原出原始的真实信号。解包裹过程中,跳变点的检测是最为关键的步骤,跳变点检测一旦出现错误,会导致λ/2的重构误差,并且导致后续的重构偏离。
7.usman zabit(adaptive transition detection algorithm for a self
‑
mixing displacement sensor)提出了一种自适应阈值跳变点检测方法,具体做法为:对自混合信号进行求导并设置自适应阈值,对超过阈值的点进行检测,作为跳变点。该算法可应用于适度和部分弱反馈信号,但是在噪声干扰的情况下需要滤波器并且会严重影响跳变点的位置。
8.本发明使用的自混合信号相位解卷方法在信噪比较低时,也能准确检测跳变点,具有更高地鲁棒性;自混合测振系统具有结构简单,易准直等特点;利用光学镜组将其与红
,p=p 1。
19.(6)根据phi_f,计算phi_0(n)=phi_f(n) csin(phi_f(n) arctan(α)), 其中c和α分别为反馈强度因子和线宽展宽因子。
20.(7)计算位移l(n)= phi_0(n)λ/(4),其中λ为激光二极管ld的波长。
21.优选的,所述解调算法按照如下步骤:所述红外测温模块的输出电压信号为t,则温度信号s=k*t b,其中k为比例系数,b为偏置系数。
22.优选的,所述光电二极管pd与激光二极管ld相连,测量其光功率,并将光功率信号转换为电流信号。
23.优选的,所述信号放大模块与光电二极管pd相连,用于将光电二极管pd输出的电流信号转换为电压信号并放大,作为振动测量信号。
24.优选的,所述准直聚焦镜组置于激光二极管ld与振动物体之间,对激光二极管ld的出射光进行准直和聚焦,并接收照射到物体后返回的激光。
25.优选的,所述分色镜1置于聚焦镜组和振动物体之间,透过可见光与激光二极管ld发射的光,反射振动物体发射的红外光。
26.优选的,所述红外镜头置于分色镜1和红外测温模块之间,用于接收物体发射的红外光。
27.优选的,所述分色镜2置于准直聚焦镜组和分色镜1之间,透过激光二极管ld发射的光,反射可见光激光器发射的光。
28.优选的,所述红外测温模块设于红外镜头后侧,用于接收红外镜头收集到的红外光,并将辐射功率转换为电压信号发送至信号处理模块。
29.由于采用上述技术方案,本发明具有以下有益效果。
30.1、本发明使用的自混合信号相位解卷方法在信噪比较低时,也能准确检测跳变点,具有更高地鲁棒性。
31.2、本发明使用的自混合测振系统具有结构简单,易准直、精度高、检测速度快、响应时间短等特点。
32.3、本发明使用利用光学镜组将其与红外测温模块联合使用,可以实现无接触式温度和振动的测量,不影响物体的所处状态与自运行,应用范围广泛。
附图说明
33.发明实施例或现有技术中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
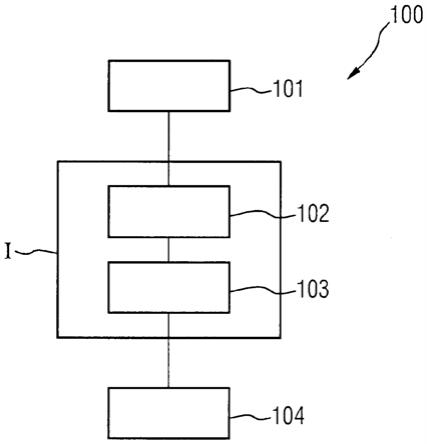
34.图1是本发明的系统示意图。
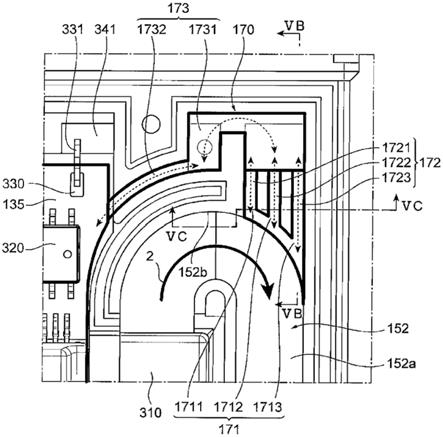
35.图2 为一种收发镜组的结构示意图。
36.图3 为振动和温度测量方法流程图。
37.图4 为一帧振动测量信号。
38.图5 为处理后的振动测量信号。
39.图6为根据振动测量信号恢复出的位移信号。
40.附图中,1
‑
振动测量模块、11
‑
激光二极管ld、12
‑
电源、13
‑
光电二极管pd 、14
‑
放
大模块、2
‑
红外测温模块、3
‑
收发镜组、31
‑
聚焦镜组、32
‑
分色镜1、33
‑
红外镜头、34
‑
分色镜2、4
‑
信号处理模块、5
‑
信号传输模块、6
‑
可见光激光器、7
‑
振动物体。
具体实施方式
41.非接触式振动和温度测量系统的结构如图1所示,包括振动测量模块1、红外测温模块2、收发镜组3、信号处理模块4、信号传输模块5、可见光激光器6。
42.振动测量模块1由1550nm激光二极管ld11、电源12、光电二极管pd13、放大模块14组成。系统工作时,电源12向激光二极管ld11提供恒定电流,驱动激光二极管ld11发射激光,激光经过收发镜组3后投射到振动物体7上,振动物体7的散射光经过收发镜组3后回到激光二极管ld11,产生自混合干涉效应,使激光二极管ld11的光功率得到调制。光电二极管pd13实时监测激光二极管ld11的光功率,其输出电流包含自混合干涉信息。光电二极管pd13的输出接到放大模块14,将光电二极管pd13输出的微弱电流信号转换成电压信号并放大。
43.红外测温模块2内置红外传感器,收发镜组3接收振动物体的红外辐射,并聚焦到传感器上,将辐射功率转换为电信号并发送至信号处理模块,计算目标物体的温度。
44.收发镜组3的结构如图2所示,包括准直聚焦镜组31、分色镜1 32、分色镜2 34、红外镜头33。准直与聚焦镜组31将激光二极管ld11出射的光进行准直和聚焦;分色镜34通过1550nm光,反射可见光激光器6发射的650nm激光,用于将指引光整合到光束中;分色镜32通过1550nm光和650nm指引光,反射8~14μm波段红外光至红外镜头33,红外镜头33聚焦8~14μm波段的红外光至红外测温模块,可用于测量塑料、喷涂、烤漆等表面的物体温度。
45.信号处理模块4分别与放大模块14和红外测温模块2相连,用于处理振动测量信号和温度测量信号。处理温度测量信号时,信号处理模块4根据检测到的光功率,计算对应的物体温度;处理振动信号时,使用相位解卷法计算位移。
46.信号传输模块5通过蓝牙接口、wifi接口和usb接口传输测量结果至显示终端。
47.本公开实施例提供一种非接触式振动和温度测量方法,该方法可以应用在非接触式振动和温度测量系统中,图3为本公开实施例的振动和温度测量方法流程图。
48.s100:收发镜组接收物体红外辐射,聚焦与准直激光二极管ld出射激光并接收经过物体返回的光。
49.s210:红外测温模块中的红外传感器将物体发射的红外光转换为电压信号。
50.s220:根据电压信号计算温度信号。
51.s310:激光二极管ld出射光经振动物体后返回激光二极管ld内腔,形成自混合干涉,使用光电二极管pd检测自混合干涉信号。
52.s320:使用放大模块将其电流转换成电压信号并放大。
53.s330:使用相位解卷算法计算振动位移。
54.测量具体实施时,计算温度值的方法为。
55.红外测温模块的输出电压信号为t,则温度信号s=k*t b,其中k为比例系数,b为偏置系数。
56.测量具体实施时,所使用的相位解卷方法步骤如下。
57.(1)实时获取振动测量信号,对其进行分帧处理,对于每一帧信号x,对其进行中值
滤波、平滑滤波和归一化处理后,得到的数字信号记作y;图4为一帧振动测量信号x,图6为处理后的信号y。
58.(2)对于y中每个左倾条纹求y的上升过零点位置,存入a点集合,对于每个右倾条纹求y的下降过零点x位置,存入b点集合;如图5所示,a点用“*”表示,b点用“o”表示。
59.(3)在相邻的a点之间和相邻的b点之间求最大值和最小值位置,分别存入s1和s2集合。如图5所示,s1点用
“□”
表示,s2点用“ ”表示。在a点至b点区间,分别求前半段和后半段的最大值存入s1,再求两个最大值之间的最小值,存入翻转点集合r,如图6所示,r用
“◇”
表示。在p2至p1区间,分别求前半段和后半段的最小值存入s2,再求两个最小值之间的最大值,存入翻转点集合r。分别将s1、s2和r点集里的元素按照从小到大排序。
60.(4)对y进行反余弦运算,结果记作g。
61.(5)设置中间变量初始值:p=0,q=0,v=1。对g进行遍历,得到phi_f(n)=(
‑
1)pg(n) 2q,每经过一个s1点,执行p=p 1,每经过一个r点,执行v=
‑
v,每经过一次s2点,执行q=q v ,p=p 1。
62.(6)根据phi_f,计算phi_0(n)=phi_f(n) csin(phi_f(n) arctan(α)),其中c和α分别为反馈强度因子和线宽展宽因子。
63.(7)计算位移l(n)=phi_0(n)λ/(4),其中λ为激光二极管ld的波长,计算结果如图6所示。
64.使用(2)(3)步骤求解相位跳变点,与现有方法相比,在信噪比较低时,具有更高的鲁棒性。因为现有方法通过求微分信号的峰值确定跳变点,当信噪比较低时,微分信号在一个相位周期内会出现多个波峰,从而引起误判。而本方法在两个相邻过零点之间寻找最大值和最小值,可获得唯一的跳变点,从而消除了跳变点误检带来的影响。
65.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。